







 本文介绍了基于STM32F427的SVPWM控制技术,用于永磁同步电机的开环转动。详细讲解了SVPWM原理,包括三相电压矢量转换、开关状态与相电压的关系以及扇区判断。还提到了STM32F427的硬件资源,如浮点计算器、PWM端口、ADC转换,并展示了SVPWM算法的程序实现流程。
本文介绍了基于STM32F427的SVPWM控制技术,用于永磁同步电机的开环转动。详细讲解了SVPWM原理,包括三相电压矢量转换、开关状态与相电压的关系以及扇区判断。还提到了STM32F427的硬件资源,如浮点计算器、PWM端口、ADC转换,并展示了SVPWM算法的程序实现流程。
1、SVPWM原理简介
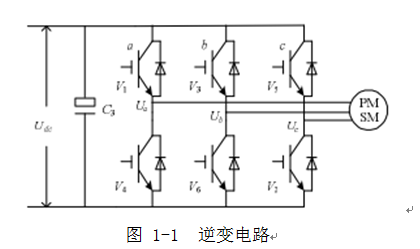
PWM(Pulse Width Modulation)脉宽调整,这是一种利用面积等效原理实现的控制技术。SVPWM(Space Vector PWM)空间矢量PWM控制,因为控制电动机内部的圆形旋转磁场,最终需要控制的是电压空间矢量。一般控制电机的三相电压相互成120度,以正弦的形式变换。我们需要控制的就是这三相电压呈现这种形式来最终控制到电磁转矩。主电路图如下所示:
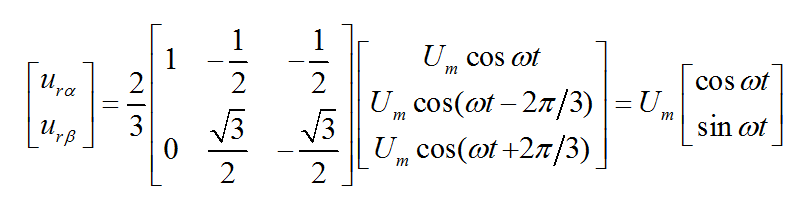
将三相电压矢量以等幅计算方式转换为两相矢量得:
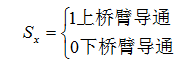
由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数Sx(x=a、b、c) 为:
(Sa、Sb、Sc)的全部可能组合共有八个,包括6个非零矢量 Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111),下面以其中一种开关组合为例分析,假设Sx(x=a、b、c)=(100),此时
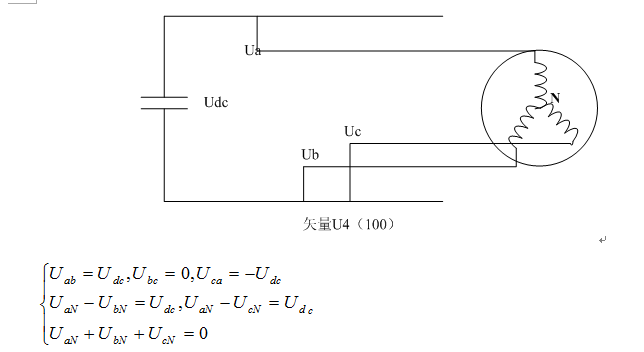
求解上述方程可得:UaN=2Ud/3、UbN=-Ud/3、UcN=-Ud/3。同理可计算出其它各种组合下的空间电压矢量,列表如下:
表 1-1 开关状态与相电压和线电压的对应关系
| Sa |
Sb |
Sc |
矢量符号 |
线电压 |
相电压 |
||||
| Uab |
Ubc |
Uca |
UaN |
UbN |
UcN |
||||
| 0 |
0 |
0 |
U0 |
0 |
0 |
0 |
0 |
0 |
0 |
| 1 |
0 |
0 |
U4 |
Udc |
0 |
-Udc |
2/3*Udc | -1/3*Udc | -1/3*Udc |
| 1 |
1 |
0 |
U6 |
0 |
Udc |
-Udc |
1/3*Udc | 1/3*Udc | -2/3*Udc |
| 0 |
1 |
0 |
U2 |
-Udc |
Udc |
0 |
-1/3*Udc | 2/3*Udc | -1/3*Udc |
| 0 |
1 |
1 |
U3 |
-Udc |
0 |
0 |
-2/3*Udc | 1/3*Udc | 1/3*Udc |
| 0 |
0 |
1 |
U1 |
0 |
-Udc |
Udc |
-1/3*Udc | -1/3*Udc | 2/3*Udc |
| 1 |
0 |
1 |
U5 |
Udc |
-Udc |
0 |
1/3*Udc | -2/3*Udc | 1/3*Udc |
| 1 |
1 |
1 |
U7 |
0 |
0 |
0 |
0 |
0 |
0 |
八个基本电压空间矢量的大小和位置入下图所示:
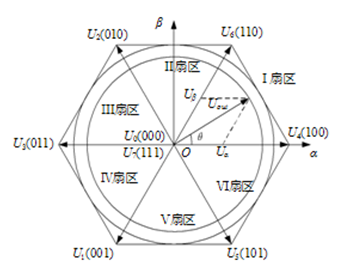
如果某一瞬间要求的电压控制键矢量在第一扇区,那么可以根据第一扇区的矢量U4以及U6以及零矢量U0或U7合成所要求的矢量U。经过计算,可以得到各矢量的状态保持时间为:
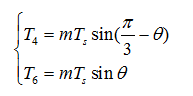
式中 m 为 SVPWM 调制系数(调制比):若要求Uref的模保持恒定,则Uref的轨迹为一圆形;若要求三相电压波形不失真(即不饱和),则Uref的轨迹应在正六边形内部;结合此两点可知Uref的模取最大值时的轨迹为正六边形的内切圆,此时m=1,故m<=1。
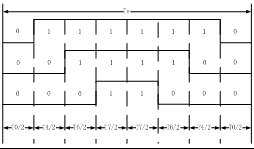
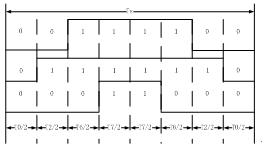
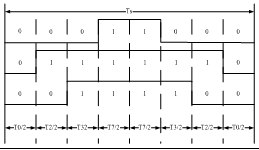
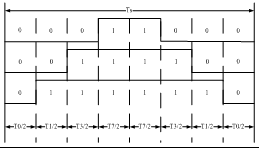
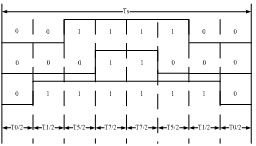
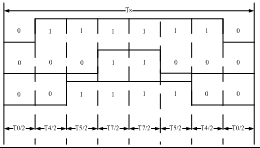
我们以减少开关次数为目标,将基本矢量作用顺序的分配原则选定为:在每次开关状态转换时,只改变其中一相的开关状态。并且对零矢量在时间上进行了平均分配,以使产生的 PWM对称,从而有效地降低PWM的谐波分量。当 U4(100)切换至 U0(000)时,只需改变 A 相上下一对切换开关,若由 U4(100)切换至 U7(111)则需改变 B、C 相上下两对切换开关,增加了一倍的切换损失。因此要改变电压矢量U4(100)、U2(010)、U1(001)的大小,需配合零电压矢量U0(000),而要改变U6(110)、U3(011)、U5(101),需配合零电压矢量U7(111)。这样通过在不同区间内安排不同的开关切换顺序, 就可以获得对称的输出波形,其它各扇区的开关切换顺序如表 所示:
| Uref 所在的位置 |
开关切换顺序 |
三相波形图 |
| Ⅰ区(0°≤θ≤60°) |
…0-4-6-7-7-6-4-0… |
 |
| Ⅱ区(60°≤θ≤120°) |
…0-2-6-7-7-6-2-0… |
 |
| Ⅲ区(120°≤θ≤180°) |
…0-2-3-7-7-3-2-0… |
 |
| Ⅳ区(180°≤θ≤240°) |
…0-1-3-7-7-3-1-0… |
 |
| Ⅴ区(240°≤θ≤300°) |
…0-1-5-7-7-5-1-0… |
 |
| Ⅵ区(300°≤θ≤360°) |
…0-4-5-7-7-5-4-0… |
 |
以第Ⅰ扇区为例,其所产生的三相波调制波形在时间 Ts 时段中如图所示,图中电压矢量出现的先后顺序为 U0、U4、U6、U7、U6、U4、U0,各电压矢量的三相波形则与表 1-2 中的开关表示符号相对应。再下一个 TS 时段,Uref 的角度增加一个γ,利用式(1-8)可以重新计算新的 T0、T4、T6 及 T7 值,得到新的合成三相类似表(1-2)所示的三相波形;这样每一个载波周期TS就会合成一个新的矢量,随着θ的逐渐增大,Uref 将依序进入第Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ区。在电压向量旋转一周期后,就会产生 R 个合成矢量。
通过以上 SVPWM 的法则推导分析可知要实现SVPWM信号的实时调制,首先需要知道参考电压矢量 Uref 所在的区间位置,然后利用所在扇区的相邻两电压矢量和适当的零矢量来合成参考电压矢量。图1-4是在静止坐标系(α,β)中描述的电压空间矢量图,电压矢量调制的控制指令是矢量控制系统给出的矢量信号 Uref,它以某一角频率ω在空间逆时针旋转,当旋转到矢量图的某个 60°扇区中时,系统计算该区间所需的基本电压空间矢量,并以此矢量所对应的状态去驱动功率开关元件动作。当控制矢量在空间旋转 360°后,逆变器就能输出一个周期的正弦波电压。
空间矢量调制的第一步是判断由 Uα 和 Uβ所决定的空间电压矢量所处的扇区。假定合成的电压矢量落在第 I 扇区,可知其等价条件如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2896
2896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









