







 本文详细介绍了PointNet及其改进版PointNet++在3D点云处理中的应用,包括点云分类和分割。PointNet作为首个直接处理点云的深度学习网络,解决了以往方法的局限性。PointNet++则通过多级采样和分组增强模型对局部特征的捕获,提高了分割效果。
本文详细介绍了PointNet及其改进版PointNet++在3D点云处理中的应用,包括点云分类和分割。PointNet作为首个直接处理点云的深度学习网络,解决了以往方法的局限性。PointNet++则通过多级采样和分组增强模型对局部特征的捕获,提高了分割效果。
本篇文章包含 PointNet 及其改进版 PointNet++。
本文章部分内容参考自博客:
https://blog.youkuaiyun.com/weixin_39373480/article/details/88878629blog.youkuaiyun.comPointNet论文名称:PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
PointNet开源代码:https://github.com/charlesq34/pointnet
PointNet++论文名称:PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
PointNet++开源代码:https://github.com/charlesq34/pointnet2
一、PointNet
1. 概述
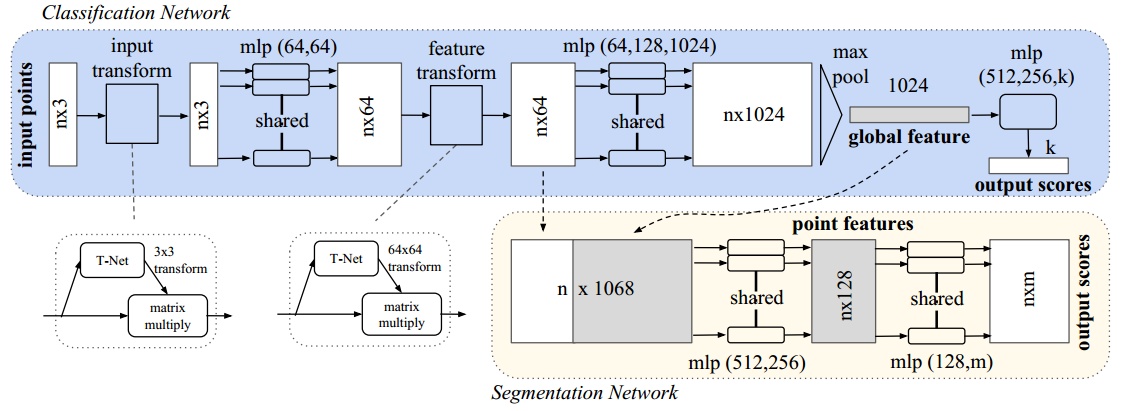
PointNet是首个直接输入3D点云输出分割结果的深度学习网络,属于开山之作,成为了后续很多工作的BaseLine。在这种方式出现以前,点云分类工作主要有以下几种方法
- 基于3DCNN的体素模型:先将点云映射到体素空间上,在通过3DCNN进行分类或者分割。但是缺点是计算量受限制,目前最好的设备也大致只能处理32×32×32的体
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3596
3596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









