







简介:本文介绍了一个基于STM32F407微控制器,与PCA9685 PWM扩展板和HC06蓝牙模块结合的项目,实现了对8个舵机的无线蓝牙控制。涉及STM32的IIC通信、USART串口通信以及蓝牙数据传输技术。通过Keil MDK开发环境,用户可以通过蓝牙设备无线控制舵机的角度。 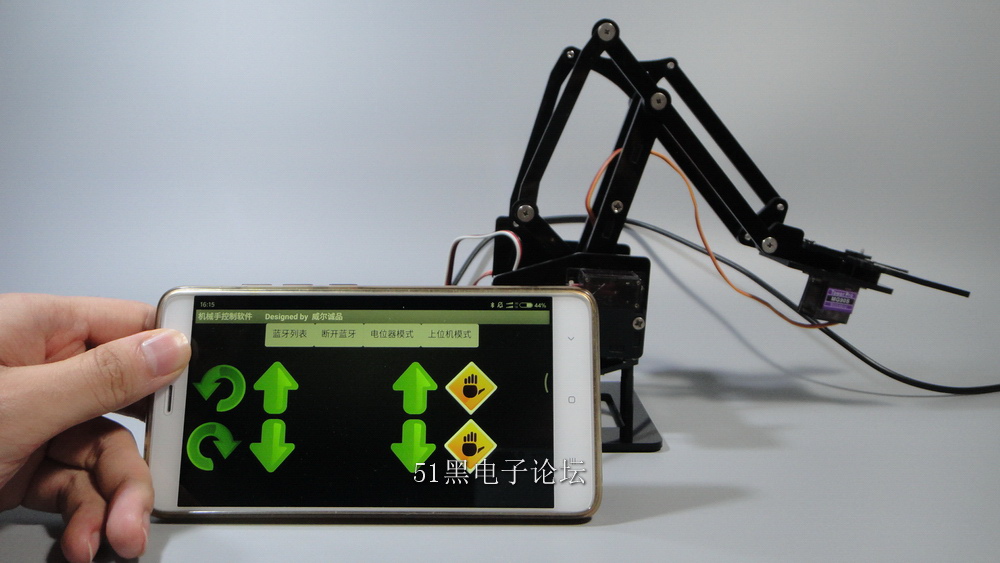
1. STM32F407微控制器及其在项目中的角色
STM32F407微控制器因其高性能和丰富的外设接口,成为许多嵌入式系统项目的核心。了解其架构特点对于开发高性能应用至关重要。
1.1 STM32F407的架构特点
STM32F407采用ARM Cortex-M4核心,运行频率高达168 MHz,并且内置DSP和FPU指令集,适用于处理复杂的算法。集成了多种通信接口,如USART、I2C、SPI以及以太网和USB,使设备能够轻松与其他模块通信,这在舵机控制项目中显得尤为重要。
1.2 STM32F407与舵机控制项目的关系
在舵机控制项目中,STM32F407作为主控制器,负责接收上位机的控制命令,执行算法,驱动舵机实现精确的角度控制。利用其高速处理能力,STM32F407能够快速响应并处理外部输入信号,确保舵机的实时响应和高精度控制。
了解STM32F407的基本工作原理和在舵机控制项目中的应用,是后续深入讨论的基础。在此基础上,本章还将探讨如何利用STM32F407实现系统主控逻辑和管理外设接口。
2. PCA9685 PWM扩展板的16通道PWM控制功能
2.1 PCA9685功能介绍
2.1.1 PCA9685的基本工作原理
PCA9685是一款集成在单片机系统中用于生成脉冲宽度调制(PWM)信号的I2C总线接口的16通道LED控制器。这款PWM控制器可以在12位分辨率下,产生256个不同的占空比,从而实现对LED亮度的精细控制。PCA9685的工作原理是通过接收I2C总线命令来设置每个通道的频率和占空比,之后,它生成对应占空比的PWM波形输出。
PCA9685控制器内部具有一个可编程的振荡器,可以设定输出PWM波形的频率。通过编程改变振荡器的时钟周期,可以得到所需的PWM频率。每个通道都可以独立编程,使用I2C总线进行配置,大大简化了多通道PWM信号的生成过程。
2.1.2 16通道PWM信号的产生机制
PCA9685利用内置的12位的计数器产生PWM信号。计数器运行在一个预先设定好的频率上,它随着内部振荡器产生的时钟周期上下滚动。通过编程可以控制计数器的起始点和终止点,对应到特定的占空比,当计数器的值在起始点和终止点之间时,对应的PWM输出为高电平,否则为低电平。
每个通道都可以通过I2C发送的命令独立编程,包括频率和占空比。此机制允许16个通道输出完全独立的PWM信号,非常适合于控制多个舵机或其他需要精确时序控制的设备。
2.2 PCA9685在舵机控制中的应用
2.2.1 PWM信号与舵机角度的关系
舵机通常使用PWM信号控制其旋转角度。标准的舵机接受周期为20ms的PWM信号,脉宽从1ms到2ms变化,对应的角度从0度到180度。PCA9685通过设置每个通道的占空比,可以精确地控制输出到舵机的PWM信号,从而实现对其旋转角度的控制。
在舵机控制应用中,要使用PCA9685提供精确的PWM信号,需要根据舵机的参数特性来确定合适的PWM频率及占空比范围。通常舵机的数据手册会提供所需的脉冲宽度范围,根据此信息可以设定PCA9685的相应参数。
// 示例代码:设置PCA9685的PWM寄存器值以控制舵机角度
void set_servo_angle(int channel, int angle) {
// 假设14bit寄存器用于占空比,20ms为周期
int pulseWidth = (angle / 180.0) * (4096 - 1) + 1024; // 1024对应于1ms脉冲宽度
int lowByte = pulseWidth & 0xFF; // 占空比的低8位
int highByte = (pulseWidth >> 8) & 0xFF; // 占空比的高8位
// 发送I2C命令来设置通道的占空比
i2c_write_register(PCA9685_BASE_ADDRESS + (4 * channel), lowByte);
i2c_write_register(PCA9685_BASE_ADDRESS + (4 * channel) + 1, highByte);
}
2.2.2 PCA9685的配置与初始化过程
PCA9685的配置和初始化通常涉及设置I2C总线地址,确定PWM频率,以及启动设备。在编写初始化代码时,需要首先设置PCA9685的控制寄存器,包括模式寄存器、时钟寄存器等。
首先,需要配置PCA9685的模式寄存器,以确保PWM输出是正确地进行更新的。例如,需要设置子地址1010000x,其中x是PCF8574兼容模式选择位。接着,设置预分频寄存器,以获得期望的PWM频率。
// 示例代码:PCA9685的初始化配置
void pca9685_init(int freq) {
uint8_t prescale_value = 250; // 根据期望的频率计算预分频值
// 设定模式1寄存器,允许所有输出引脚改变
i2c_write_register(PCA9685_MODE1, 0x00);
// 设定预分频器,以获得所需PWM频率
i2c_write_register(PCA9685_PRESCALE, prescale_value);
// 设定模式2寄存器,激活所有通道的输出
i2c_write_register(PCA9685_MODE2, 0x04);
// 设定LED输出使能寄存器(可选)
i2c_write_register(PCA9685_ALL_LED, 0x00);
// 设定模式1寄存器,重置睡眠模式
i2c_write_register(PCA9685_MODE1, 0x0A);
}
2.2.3 调试PCA9685的常见问题及解决方案
调试PCA9685可能遇到的问题包括初始化失败、PWM信号不稳定或不符合预期,以及与控制器的通信问题。首先,应确保I2C总线地址设置正确,并且通信线(SDA和SCL)连接良好。
在调试时,可以通过读取状态寄存器来检查设备是否正常工作。如果发现设备无法响应,可能是由于供电问题,或者是因为I2C地址冲突。另外,如果PWM输出不稳定,可能是因为时钟频率设置不正确,这时需要重新计算和设置预分频值。
// 示例代码:检查PCA9685状态寄存器
uint8_t status = i2c_read_register(PCA9685_MODE2);
if ((status & 0x01) == 0) {
// 如果sleep位为0,则表示设备没有正常工作
printf("PCA9685 not responding, check the I2C connection and power supply.\n");
}
通过上述步骤,我们能够设置PCA9685以产生稳定的16通道PWM信号,进而控制多个舵机。在初始化和配置过程中,确保所有的步骤均按照PCA9685的规格书来进行,以保证系统的稳定性和可靠性。
3. HC06蓝牙模块的使用和配置
3.1 HC06模块功能与特性
3.1.1 HC06模块的基本通信原理
HC06是一个简单的蓝牙串口通信模块,它基于蓝牙2.0技术,提供一个无线串行端口来与其他蓝牙设备通信。HC06模块主要由两个部分组成:一个是蓝牙芯片,负责蓝牙的无线通信功能;另一个是Serial Port Profile (SPP),它允许数据通过串行端口传输。SPP是蓝牙中最普遍的通信协议之一,因为它可以模拟传统的串口通信。
使用HC06,用户可以通过蓝牙与模块建立连接,就像连接到一台串口设备一样,发送和接收数据。该模块与单片机通过标准的串行通信接口连接,并且在软件上通过AT命令进行配置。
3.1.2 HC06模块在无线控制中的优势
HC06模块在无线控制中的优势主要体现在它的易用性和成本效益上。相比于有线连接,蓝牙模块提供了一种无需物理连接即可控制设备的方式,极大地提高了系统的灵活性和适用性。用户可以通过手机、平板电脑或者任何支持蓝牙的设备,远程控制连接了HC06模块的设备。此外,HC06模块具有低功耗的特点,适合应用于电池供电的便携式设备。
在实际应用中,HC06的配置和使用都非常简单。模块出厂时已预设为从设备模式,因此无需复杂的设置过程,用户只需连接电源和串口,即可开始通信。这些特性使得HC06成为微控制器项目中常用的蓝牙通信解决方案。
接下来,我们深入了解如何配置和配对HC06模块,并最终将其与STM32F407微控制器进行连接,实现无线控制功能。
3.2 HC06模块的配置与配对
3.2.1 配置HC06模块的参数设置
在使用HC06模块之前,需要对其基本参数进行设置,以便它能够正确地与其他蓝牙设备通信。以下是配置HC06模块的主要步骤:
- 设置波特率 :串行通信的波特率需要与通信设备匹配,常见的设置有9600、115200等。
AT+BAUD8 // 设置波特率为9600
- 设备名称更改 :为了易于识别,可以设置HC06模块的设备名称。
AT+NAME=MyHC06 // 将设备名设置为"MyHC06"
- 配对密码设置 :为了增加通信的安全性,可以设置一个PIN码进行配对。
AT+PIN1234 // 设置配对密码为"1234"
每个命令后都需要发送回车符("\r\n"),并且模块会通过"OK"或"ERROR"响应命令的执行结果。正确的配置对于后续模块的稳定工作至关重要。
3.2.2 HC06模块与STM32F407的连接设置
为了将HC06模块与STM32F407微控制器连接,我们需要将HC06的TXD(发送数据)引脚连接到STM32F407的RX(接收数据)引脚,以及将HC06的RXD(接收数据)引脚连接到STM32F407的TX(发送数据)引脚。此外,还需要连接GND(地)和VCC(电源)引脚。
通常情况下,STM32F407的串口配置为:波特率9600,数据位8位,无奇偶校验位,停止位1位,无流控制。这些设置应该与HC06模块的配置相匹配。
3.2.3 蓝牙模块间的通信协议配置
当HC06模块与STM32F407微控制器连接好之后,需要设置STM32F407的串口通信协议,以确保数据可以正确地在两者之间传输。在STM32F407中,串口的配置通常在代码中完成,并且需要确保接收中断和发送中断得到正确的设置和处理。
// 伪代码展示串口初始化
void USART_Init()
{
// 初始化串口参数...
// 配置GPIO...
// 使能串口时钟...
// 设置波特率...
// 配置中断...
// 启动串口...
}
为了简化通信,数据通常以帧的形式发送。每帧以起始位开始,接着是数据字节,最后是停止位。STM32F407接收数据时,会触发中断,这时代码需要处理接收到的数据。
// 伪代码展示数据接收中断处理
void USARTx_IRQHandler(void)
{
if(USART_GetITStatus(USARTx, USART_IT_RXNE) != RESET)
{
char receivedData = USART_ReceiveData(USARTx);
// 处理接收到的数据...
}
}
在通信过程中,双方需要遵守事先约定好的协议,确保发送和接收的数据格式一致,避免出现数据解析错误。通信协议的制定要考虑到数据的完整性、错误检测和恢复机制,以保证通信的可靠性。
通过上述步骤,HC06模块即可完成与STM32F407微控制器的连接和配置,为后续的项目应用打下坚实的基础。
4. IIC通信在STM32F407与PCA9685之间的应用
在现代电子项目中,高效的通信协议对于实现设备间的快速和准确的数据交换至关重要。IIC(Inter-Integrated Circuit),又称I2C,是一种广泛应用于微控制器和各种外围设备之间的串行通信协议。它使用两条总线线路:一条串行数据线(SDA)和一条串行时钟线(SCL),允许设备之间进行双向数据传输。在本章中,我们将深入探讨IIC通信协议的基础知识,以及如何在STM32F407微控制器与PCA9685 PWM扩展板之间实现IIC通信。
4.1 IIC通信协议基础
4.1.1 IIC通信协议的特点及优势
IIC通信协议具有以下特点和优势:
- 多主多从支持 :IIC允许多个主机控制总线,但同一时刻只能有一个主机进行数据传输。
- 低速通信 :其速率通常在100kbps至3.4Mbps之间,适用于传感器和低速设备通信。
- 简洁的硬件设计 :仅需两条线路(SDA和SCL)和必要的上拉电阻。
- 地址识别 :每个设备都具有唯一的地址,主设备通过这个地址识别和通信。
- 广播和多点通信 :IIC支持地址广播,允许多个设备接收同一消息。
- 软件实现简单 :大多数微控制器提供IIC硬件接口,也支持通过软件模拟实现IIC通信。
4.1.2 STM32F407中的IIC接口配置
在STM32F407微控制器中,IIC接口配置分为硬件配置和软件配置:
- 硬件配置 :确保IIC外设时钟已开启,并将IIC引脚配置为复用开漏输出。
- 软件配置 :配置IIC的工作模式(主模式或从模式)、通信速率(时钟频率)、地址模式和设备地址等。
IIC通信通过高级控制寄存器(如CR1、CR2、ISR、SR、OAR1、OAR2、DR)进行管理。初始化过程中需要设置这些寄存器的特定位以配置IIC的工作参数。
4.2 IIC通信在舵机控制中的实现
4.2.1 PCA9685的IIC地址与寄存器操作
PCA9685作为一个从设备,其IIC地址通常由硬件固定,或通过硬件引脚设置。在通信前,STM32F407需要正确识别PCA9685的地址。PCA9685的内部寄存器包括模式寄存器、输出寄存器等,通过向这些寄存器写入特定值,可以控制PCA9685的行为,例如设置PWM频率、打开或关闭输出通道。
4.2.2 编写IIC通信的驱动程序
编写IIC通信驱动程序需要以下步骤:
- 初始化IIC接口 :设置为所需的工作模式、通信速率和地址模式。
- 发送数据 :实现一个函数用于发送数据,通常是起始信号、设备地址、写标志、内部寄存器地址和数据,最后发送停止信号。
- 接收数据 :实现一个函数用于接收数据,启动IIC通信,发送地址并读取数据,最后发送停止信号。
- 错误处理 :包括超时和NACK(非应答)处理机制。
// 示例:IIC发送数据函数
void IIC_SendData(uint8_t deviceAddr, uint8_t regAddr, uint8_t* data, uint16_t size)
{
// 开始信号
// 发送设备地址和写标志
// 发送寄存器地址
// 循环发送数据
// 停止信号
}
4.2.3 实现STM32F407与PCA9685的IIC通信
实现STM32F407与PCA9685的IIC通信关键在于数据的发送和接收逻辑。首先,STM32F407通过IIC向PCA9685的寄存器发送PWM控制命令,然后PCA9685生成相应的PWM信号以驱动舵机。在驱动程序中,需要根据PCA9685的技术手册配置寄存器来设置PWM频率和占空比,以达到控制舵机转动角度的目的。
以下是整个过程的示意图:
通过这个流程图,我们可以清晰地看到STM32F407与PCA9685之间的数据交互过程。STM32F407首先发送初始化指令,配置PCA9685,随后根据需要发送具体的PWM控制指令来控制舵机。
在IIC通信中,STM32F407充当主机,负责管理总线和控制数据流。PCA9685作为从设备,响应STM32F407的命令,执行具体的操作。这种主从结构使得通信过程有序,并且避免了总线冲突。
IIC通信在舵机控制中的应用提高了系统的集成度和控制的灵活性,使得通过STM32F407可以轻松地控制多个舵机,进而实现复杂的机械运动控制。
5. USART串口通信的设置和功能
5.1 USART通信协议介绍
5.1.1 USART的基本通信机制
通用同步/异步收发传输器(USART)是微控制器中常见的一种串行通信接口,其基本通信机制包括同步和异步模式。在异步模式中,数据以帧的形式进行传输,每个帧由起始位、数据位、可选的奇偶校验位和停止位组成。数据在发送端被串行化,并在接收端被反串行化。同步模式则通常需要一个外部时钟信号来同步数据的发送与接收。
5.1.2 STM32F407的USART接口配置
STM32F407微控制器的USART接口配置通常涉及多个步骤,包括时钟使能、GPIO配置、USART初始化和中断配置(如果需要)。
- 时钟使能:首先需要使能对应的USART接口时钟。
- GPIO配置:USART的TX和RX引脚需要配置为复用功能,并设置为推挽输出。
- USART初始化:在软件中配置波特率、数据位、停止位和校验位等参数。
- 中断配置(可选):如果需要异步接收或发送数据,还需要配置相应的中断。
// USART初始化代码示例
void USART1_Init(uint32_t baudrate) {
// 使能GPIOA和USART1时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
// 配置PA9(TX)和PA10(RX)
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 连接USART1引脚到AF9
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
// USART1配置
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = baudrate;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 使能USART1
USART_Cmd(USART1, ENABLE);
}
代码解释: - 代码段中 RCC_AHB1PeriphClockCmd 和 RCC_APB2PeriphClockCmd 函数用于时钟使能,为GPIO和USART1接口提供时钟源。 - GPIO_InitTypeDef 和 USART_InitTypeDef 结构体用于配置GPIO引脚模式以及USART参数。 - GPIO_PinAFConfig 函数用于将GPIO引脚复用为USART功能。 - USART_Init 函数用于根据提供的参数初始化USART1模块。 - 最后通过 USART_Cmd 使能USART1接口。
5.2 USART在项目中的应用
5.2.1 USART与HC06模块的连接与通信
在舵机控制项目中,USART通常用来实现与HC06蓝牙模块的连接和通信。由于HC06模块支持串口通信,因此可以通过配置STM32F407的USART接口与HC06进行数据交换。
5.2.2 编写USART通信的驱动程序
编写USART通信的驱动程序主要包括初始化代码(已展示在上节)、数据发送和接收函数。发送函数负责将数据放入到USART的发送缓冲区,而接收函数可以是轮询方式或中断驱动方式。
// 数据发送函数
void USART1_SendData(uint8_t data) {
// 等待发送数据寄存器为空
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
// 将数据写入到USART数据寄存器
USART_SendData(USART1, data);
}
// 数据接收函数
uint8_t USART1_ReceiveData(void) {
// 等待接收数据寄存器非空
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
// 返回接收到的数据
return USART_ReceiveData(USART1);
}
代码解释: - USART_SendData 函数用于发送单个字节数据到USART1接口, USART_GetFlagStatus 函数用于检查发送缓冲区是否为空。 - USART_ReceiveData 函数用于接收数据, USART_GetFlagStatus 用于检查接收缓冲区是否有数据。
5.2.3 USART的调试与异常处理
在调试USART通信时,需要检查硬件连接、波特率设置、时钟设置等是否正确。此外,异常处理包括数据帧错误、溢出错误以及噪声检测错误等,这些可以通过中断服务函数和相关标志位进行处理。
// USART中断服务函数示例
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
// 读取接收到的数据
uint8_t data = USART1_ReceiveData();
// 可以在这里添加数据处理逻辑
}
// 其他中断处理...
}
代码解释: - USART_GetITStatus 函数用于检查是否收到中断信号。 - 在中断服务函数中,通过 USART1_ReceiveData 读取接收到的数据,并在接收到数据后进行相应的处理。
以上章节内容紧密围绕USART串口通信的设置和功能,由浅入深地介绍了USART通信协议基础和其在项目中的具体应用,并通过代码块和逻辑分析,展示了如何在STM32F407与HC06模块之间实现数据通信。
6. 蓝牙数据传输协议的实现
6.1 蓝牙通信协议栈介绍
蓝牙通信协议栈是一系列协议的集合,它定义了蓝牙设备之间交换数据的规则和格式。了解这些协议栈的层次结构和数据封装机制,对于设计稳定可靠的蓝牙数据传输协议至关重要。
6.1.1 蓝牙协议栈的层次结构
蓝牙协议栈可分为几个层次,其中每一层都构建在下一层之上,提供更高级别的功能。从低到高,蓝牙协议栈通常包括:
- 无线电频率 (RF) 层 :负责信号的发送和接收。
- 基带 (Baseband) 层 :处理数据包的传输和同步。
- 链路管理器 (Link Manager) 协议 :建立和管理蓝牙设备之间的连接。
- 逻辑链路控制和适应协议 (L2CAP) :负责适配不同的数据包大小和质量服务。
- 主机控制器接口 (HCI) :定义了主机和蓝牙控制器之间的通信接口。
在应用层之上,还有不同的应用协议,如蓝牙个人局域网 (PAN)、音频、电话和对象交换协议 (OBEX) 等。
6.1.2 数据封装与解析机制
数据封装是指将应用数据按照蓝牙协议栈的要求进行封装的过程,而解析则是反过来将接收到的数据包拆解成原始应用数据的过程。蓝牙协议栈规定了数据包的结构,包括头部、净荷和校验信息。
数据包的封装过程通常涉及到:
- 访问代码 :标识和同步无线电信号。
- 报头 :包含蓝牙地址、类型、流控制信息等。
- 载荷 :实际的有效载荷数据,由L2CAP层提供。
- 校验和 :用于检测数据在传输过程中是否出错。
数据解析则需要根据上述结构来验证、解码接收到的数据包。
6.2 蓝牙数据传输协议的设计
设计一个高效的蓝牙数据传输协议,需要考虑数据包的格式定义、命令与响应策略以及传输的稳定性和安全性。
6.2.1 数据包格式定义
蓝牙数据传输协议的数据包格式需要明确和标准化,以确保发送方和接收方正确地解读数据。一般情况下,数据包格式定义会包括以下几个部分:
- 包头 :包含数据包的类型、序列号、包长等关键信息。
- 数据区域 :根据不同的数据类型存放实际的数据内容。
- 校验信息 :确保数据传输的完整性。
例如,如果设计一个用于控制舵机的角度命令的数据包,包头可以包含标识符(比如“CMDAngle”),序列号用于数据包排序,而数据区域则存放具体的角度值。
6.2.2 命令与响应的实现策略
在蓝牙通信中,命令通常是由主设备发送到从设备的,而响应则是从设备对主设备的命令作出的回应。为了实现有效的命令与响应策略:
- 命令设计 :每个命令都应有一个明确的标识,并且携带必要的参数。
- 响应设计 :每个响应也应该有独特的标识,且包含命令执行的结果信息。
例如,命令可以包含目标舵机的编号、期望角度,而响应可以包含原命令的标识、操作结果(成功或失败)和实际角度。
6.2.3 传输的稳定性和安全性措施
蓝牙通信需要考虑的因素之一是传输的可靠性。为提高传输的稳定性,可以采取以下措施:
- 错误检测与重传机制 :如果接收方检测到数据包有错,它将请求重传。
- 流量控制 :避免发送方过度发送导致接收方缓冲区溢出。
- 数据加密 :保证数据传输过程的安全,防止被截取。
安全性措施包括:
- 配对过程 :确保只有授权的设备可以建立连接。
- 密钥交换 :交换用于加密通信的密钥。
- 数据完整性检查 :验证数据在传输过程中没有被篡改。
示例代码逻辑
// 示例命令数据包构造(发送方)
uint8_t commandPacket[] = {
0x01, // 包头标识
0x00, 0x01, // 序列号
0x00, 0x00, 0x00, 0x01, // 目标舵机编号
0x00, 0x64 // 目标角度值
};
// 示例响应数据包解析(接收方)
void parseResponse(uint8_t *responsePacket) {
uint8_t commandId = responsePacket[1]; // 从响应包中提取命令标识符
uint8_t status = responsePacket[2]; // 提取操作结果状态
uint16_t actualAngle = (responsePacket[3] << 8) | responsePacket[4]; // 解析实际角度值
// 根据提取的信息进行后续处理
}
// 调用parseResponse函数进行处理
parseResponse(receivedResponsePacket);
在此示例中,命令数据包和响应数据包都是用数组定义,而在解析响应时,我们从响应数据包中提取了相关的字段信息,如命令标识符、操作结果状态和实际角度值,并根据这些信息执行相应的动作。
逻辑分析
- 命令数据包构造 :创建一个数据包用于命令的发送,包含了必要的控制信息和数据内容,这个过程需要确保数据包格式的正确性,以便接收方正确解析。
- 响应数据包解析 :设计了一个函数来处理接收到的数据包。这个函数负责从响应数据包中提取特定的信息,如命令标识、状态码和角度值,并根据这些信息做出相应的处理。
参数说明
-
commandPacket:定义了一个命令数据包的数组,其中包含了控制和数据信息。 -
parseResponse:该函数用于处理接收到的响应数据包,包括解析信息并进行后续操作。
整个蓝牙数据传输协议的实现是一个复杂的过程,需要周密的设计来保证数据传输的稳定性与安全性。在后续的开发和调试过程中,还需要不断地测试和优化,以确保通信协议的高效性和可靠性。
7. Keil MDK开发环境的应用
7.1 Keil MDK开发环境概述
7.1.1 Keil MDK的功能特点及优势
Keil MDK,即Keil Microcontroller Development Kit,是一款专为微控制器开发而设计的集成开发环境(IDE)。其功能特点主要体现在以下几个方面:
- 项目管理能力 :Keil MDK提供一个易于使用的图形化界面,使得开发者可以轻松地创建、编译、调试项目,而且它还支持版本控制工具,方便代码的版本管理。
- 丰富的调试工具 :MDK集成了强大的调试器和模拟器,支持断点、单步执行、性能分析等功能,允许开发者在不同的硬件环境下对程序进行调试。
- 支持广泛的微控制器 :Keil MDK支持各种主流的ARM Cortex-M系列微控制器,同时兼容其他架构的ARM处理器以及8051、C166、251和Cortex-R系列微控制器。
这些优势使Keil MDK成为专业开发人员进行嵌入式系统开发的首选IDE。
7.1.2 Keil MDK的项目创建与配置
创建项目的第一步是在Keil MDK中设置一个新项目,并指定使用的微控制器型号。然后,开发人员需要配置项目选项,包括编译器设置、链接器设置以及调试器设置等。对于STM32F407这类ARM Cortex-M4微控制器,必须确保以下配置设置得当:
- 处理器配置 :选择正确的微控制器型号和频率。
- 编译器优化 :选择适合项目需求的优化级别,以提高代码效率和性能。
- 内存设置 :配置Flash和RAM的大小,确保程序运行时不会超出微控制器的资源限制。
7.2 Keil MDK在舵机控制项目中的应用
7.2.1 编写和调试舵机控制代码
在编写舵机控制代码之前,需要对STM32F407进行初始化配置,包括时钟、GPIO、IIC以及中断等。初始化完成后,编写舵机控制代码,通常涉及以下内容:
- 编写主控制函数 :在主函数中,初始化相关外设后,进入一个循环,等待接收控制命令。
- 编写控制舵机的函数 :根据接收到的命令,通过PCA9685模块输出相应的PWM信号来控制舵机的角度。
- 编写中断服务函数 :处理来自HC06蓝牙模块或其他外部设备的中断请求。
调试阶段,Keil MDK提供了一个实时调试环境,允许开发者查看寄存器的值、内存内容以及变量的实时状态。对于舵机控制项目,我们可以设置断点,观察变量在特定条件下的变化,以及监测和修正代码逻辑错误。
7.2.2 项目中内存管理和性能分析
为了确保舵机控制项目的可靠性和效率,进行内存管理和性能分析是不可或缺的步骤:
- 内存分配和泄露检测 :使用Keil MDK自带的内存分析工具,可以帮助开发者检查内存分配是否正确,有无内存泄漏问题。
- 性能分析 :通过性能分析工具,可以确定程序中最耗时的部分,从而针对这些部分进行优化。
7.2.3 与硬件调试工具的协同工作
为了完成实际的硬件调试,Keil MDK支持多种硬件调试工具,例如ST-Link、J-Link等,可以与这些工具无缝协同工作:
- 连接硬件调试器 :在Keil MDK中配置调试器的接口,确保能够与所连接的硬件调试器正确通信。
- 下载和运行程序 :通过Keil MDK的调试界面,将编译好的程序下载到STM32F407微控制器中,并运行程序。
- 实时监控和调试 :利用Keil MDK的调试器功能,可以实时监控变量和寄存器的值,进行单步执行、设置断点等操作。
通过上述步骤,Keil MDK成为舵机控制项目开发和调试过程中不可或缺的工具。
简介:本文介绍了一个基于STM32F407微控制器,与PCA9685 PWM扩展板和HC06蓝牙模块结合的项目,实现了对8个舵机的无线蓝牙控制。涉及STM32的IIC通信、USART串口通信以及蓝牙数据传输技术。通过Keil MDK开发环境,用户可以通过蓝牙设备无线控制舵机的角度。

















 3012
3012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









