




 本文介绍了Dijkstra算法,一种基于贪心思想的最短路径算法。内容包括算法的优先队列实现,动画演示,详细讲解,手动模拟过程以及代码实现。此外,还讨论了在处理无向边时的调整方法,对于邻接矩阵和邻接表的处理方式。
本文介绍了Dijkstra算法,一种基于贪心思想的最短路径算法。内容包括算法的优先队列实现,动画演示,详细讲解,手动模拟过程以及代码实现。此外,还讨论了在处理无向边时的调整方法,对于邻接矩阵和邻接表的处理方式。
Dijkstra算法是基于贪心思想的一种求最短路径的算法。
他的实现基于优先队列这种数据结构

手动模拟示意图的结果

实现代码:
#include <iostream>
#include <vector>
using namespace std;
#include<stack>
const int INF = 1000000000;
/*Dijkstra算法解决的是单源最短路径问题,即给定图MGrap(V,E)和起点s(起点又称为源点),
求从起点s到达其它顶点的最短距离,并将最短距离存储在矩阵d中*/
void Dijkstra(int n, int s, vector<vector<int>> MGrap, vector<bool>& vis, vector<int>& d, vector<int>& pre)
{
/*
param
n: 顶点个数
s: 源点
MGrap: 图的邻接矩阵
vis: 标记顶点是否已被访问
d: 存储源点s到达其它顶点的最短距离
pre: 存储从起点s到达顶点v的最短路径上v的前一个顶点 (新添加)
*/
fill(d.begin(), d.end(), INF); //初始化最短距离矩阵,全部为INF
for (int i = 0; i < n; ++i) //新添加
pre[i] = i;
d[s] = 0; //起点s到达自身的距离为0
for (int i = 0; i < n; ++i)
{
int u = -1; //找到d[u]最小的u
int MIN = INF; //记录最小的d[u]
for (int j = 0; j < n; ++j) //开始寻找最小的d[u]
{
if (vis[j] == false && d[j] < MIN)
{
u = j;
MIN = d[j];
}
}
//找不到小于INF的d[u],说明剩下的顶点和起点s不连通
if (u == -1)
return;
vis[u] = true; //标记u已被访问
for (int v = 0; v < n; ++v)
{
//遍历所有顶点,如果v未被访问&&u能够到达v&&以u为中介点可以使d[v]更优
if (vis[v] == false && d[u] + MGrap[u][v] < d[v]) {
d[v] = d[u] + MGrap[u][v]; //更新d[v]
pre[v] = u; //记录v的前驱顶点为u(新添加)
}
}
}
}
//输出从起点s到顶点v的最短路径
void DFSPrint(int s, int v, vector<int> pre)
{
if (v == s) {
cout << s << " ";
return;
}
DFSPrint(s, pre[v], pre);
cout << v << " ";
}
// 打印最短路径
void PrintShortPath(vector<vector<int>> G, int v0, vector<int> P, vector<int> D){
int i, k;
stack<int> path;
cout<<"顶点v"<<v0<<"到其他顶点之间的最短路径如下: "<<endl;
for(i = 0; i < G.size(); ++i){
if(i == v0) continue;
cout<<"v"<<v0<<"--"<<"v"<<i<<" weight: "<<D[i]<<" Shortest path: ";
path.push(i);
int k = P[i];
while(k != 0){
path.push(k);
k = P[k];
}
path.push(v0);
while(!path.empty()){
if(path.size() != 1)
cout<<path.top()<<"->";
else
cout<<path.top()<<endl;
path.pop();
}
}
}
int main()
{
int n = 6;
vector<vector<int>> MGrap = { {0,1,INF,4,4,INF},
{INF,0,INF,2,INF,INF},
{INF,INF,0,INF,INF,1},
{INF,INF,2,0,3,INF},
{INF,INF,INF,INF,0,3},
{INF,INF,INF,INF,INF,0} };
vector<bool> vis(n);
vector<int> d(n);
vector<int> pre(n);
Dijkstra(n,0,MGrap,vis,d,pre);
for (auto x : d)
cout << x << " ";
cout << endl;
//输出从起点s到顶点v的最短路径
DFSPrint(0, 5, pre);
cout<<endl;
PrintShortPath(MGrap,0,pre,d);
return 0;
}
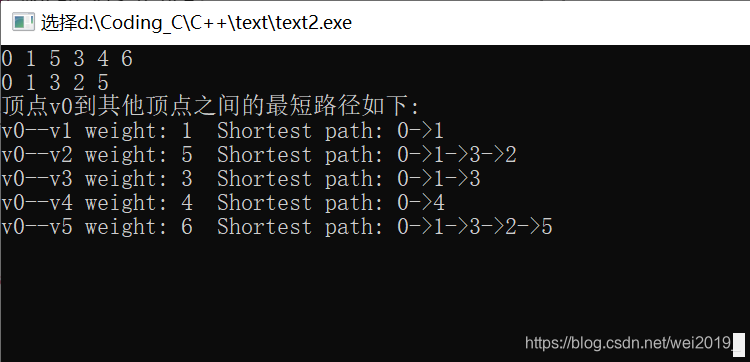
运行结果:
另外一种实现的方法
#include<iostream>
#include<stack>
using namespace std;
#define MAXVEX 9
#define INFINITY 65535
typedef int Patharc[MAXVEX];
typedef int ShortPathTable[MAXVEX];
typedef struct {
int vex[MAXVEX];
int arc[MAXVEX][MAXVEX];
int numVertexes;
} MGraph;
// 构建图
void CreateMGraph(MGraph *G){
int i, j, k;
// 初始化图
G->numVertexes = 9;
for(i = 0; i < G->numVertexes; ++i){
G->vex[i] = i;
}
for(i = 0; i < G->numVertexes; ++i){
for(j = 0; j < G->numVertexes; ++j){
if(i == j)
G->arc[i][j] = 0;
else
G->arc[i][j] = G->arc[j][i] = INFINITY;
}
}
G->arc[0][1] = 1;
G->arc[0][2] = 5;
G->arc[1][2] = 3;
G->arc[1][3] = 7;
G->arc[1][4] = 5;
G->arc[2][4] = 1;
G->arc[2][5] = 7;
G->arc[3][4] = 2;
G->arc[3][6] = 3;
G->arc[4][5] = 3;
G->arc[4][6] = 6;
G->arc[4][7] = 9;
G->arc[5][7] = 5;
G->arc[6][7] = 2;
G->arc[6][8] = 7;
G->arc[7][8] = 4;
// 设置对称位置元素值
for(i = 0; i < G->numVertexes; ++i){
for(j = i; j < G->numVertexes; ++j){
G->arc[j][i] = G->arc[i][j];
}
}
}
void ShortPath_Dijkstra(MGraph G, int v0, Patharc P, ShortPathTable D){
int final[MAXVEX];
int i;
for(i = 0; i < G.numVertexes; ++i){
final[i] = 0;
D[i] = G.arc[v0][i];
P[i] = 0;
}
D[v0] = 0;
final[v0] = 1;
for(i = 0; i < G.numVertexes; ++i){
int min = INFINITY;
int j, k, w;
for(j = 0; j < G.numVertexes; ++j){// 查找距离V0最近的顶点
if(!final[j] && D[j] < min){
k = j;
min = D[j];
}
}
final[k] = 1;
for(w = 0; w < G.numVertexes; ++w){// 更新各个顶点的距离
if(!final[w] && (min + G.arc[k][w]) < D[w]){
D[w] = min + G.arc[k][w];
P[w] = k;
}
}
}
}
// 打印最短路径
void PrintShortPath(MGraph G, int v0, Patharc P, ShortPathTable D){
int i, k;
stack<int> path;
cout<<"顶点v"<<v0<<"到其他顶点之间的最短路径如下: "<<endl;
for(i = 0; i < G.numVertexes; ++i){
if(i == v0) continue;
cout<<"v"<<v0<<"--"<<"v"<<i<<" weight: "<<D[i]<<" Shortest path: ";
path.push(i);
int k = P[i];
while(k != 0){
path.push(k);
k = P[k];
}
path.push(v0);
while(!path.empty()){
if(path.size() != 1)
cout<<path.top()<<"->";
else
cout<<path.top()<<endl;
path.pop();
}
}
}
int main(int argc, char const *argv[]) {
int v0 = 0; // 源点
MGraph G;
Patharc P;
ShortPathTable D;
CreateMGraph(&G);
ShortPath_Dijkstra(G, v0, P, D);
PrintShortPath(G, v0, P, D);
return 0;
}
如果题目给出的是无向边(即双向边)而不是有向边,又该如何解决呢?其实很简单,只需要把无向边当成两条指向相反的有向边即可。对邻接矩阵来说,一条u与v之间的无向边在输入时可以分别对G[u][v]和G[v][u]赋以相同的边权;而对于邻接表来说,只需要在u的邻接表Adj[u]末尾添加上v,并在v的邻接表Adj[v]末尾添加上u即可。


















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









