



工业自动化系统的可视化系统
1. 对象描述
SCADA系统(监控控制与数据采集)目前被广泛用于生产过程的监控。它们使您能够快速了解设备实际状况,快速定位报警,或对来自设备的特定信号做出自动响应。
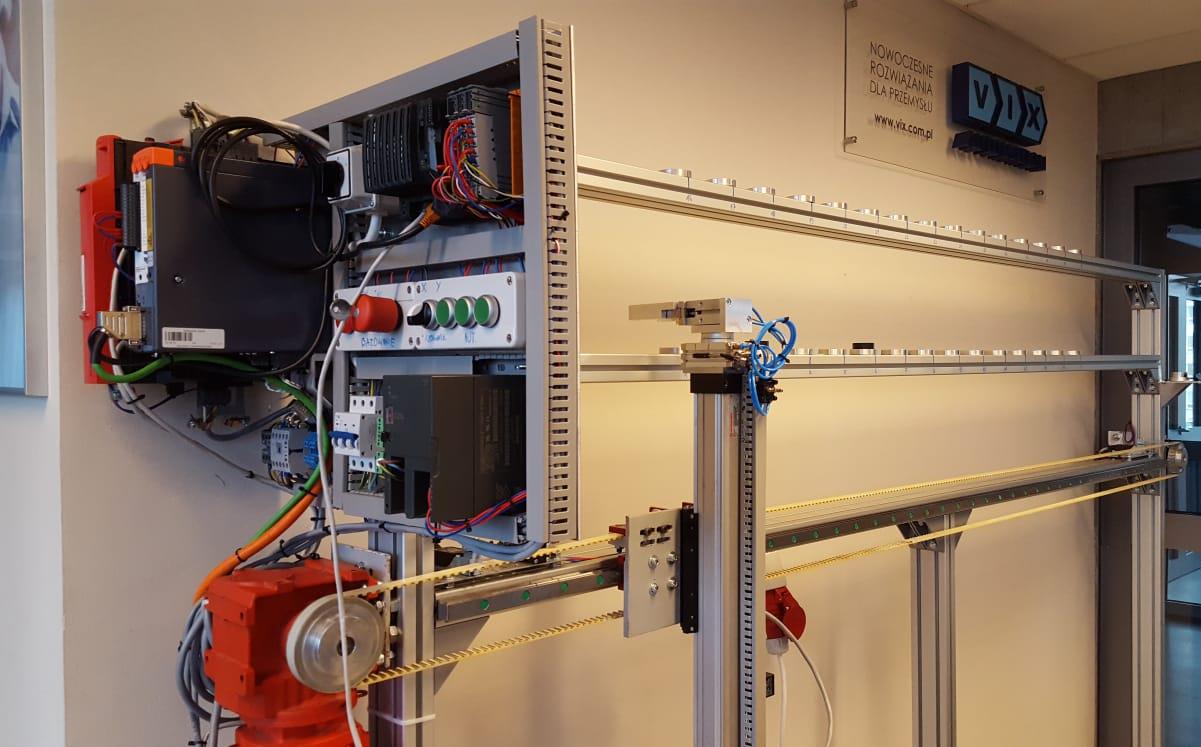
在西里西亚理工大学机械工程学院的工程过程自动化与集成制造系统研究所,研究人员从事工业系统和智能系统的自动化相关研究。该研究所的研究人员还与其他国外中心开展合作。本文所描述的高架存储系统已安装在西里西亚理工大学新技术中心的机电系统仿真与可视化实验室。
图形层中的现代SCADA系统负责呈现动态变化的信息。用户可以确定任何支持过程监控的算法和配方。本文展示了高架仓库的可视化(图1)。

所介绍的设备具有两个独立的轴,其电动机通过变频器进行控制。多个独立驱动装置需要相互协调运动,并根据所需的操作算法执行各自的作业。因此,采用可编程逻辑控制器(PLC)作为主控装置,并通过工业局域网在控制系统中分发数据。通过TCP/IP协议传输的信息易于访问,从而可以添加监控与数据采集系统(SCADA)。高架仓库的主要作用是实现部件组件的运输功能,即按照特定算法对存放的零件进行存放和提取。高架仓库的驱动装置应满足以下假设条件:
- 确保执行器在X轴上的左右移动,
- 提供执行器在Y轴上的上下移动,
- 能够设置X轴和Y轴驱动的速度,
- 可指定X轴和Y轴驱动的位置,
- 能够在任意位置停止驱动,
- 能够通过主控设备控制工作。
X轴控制
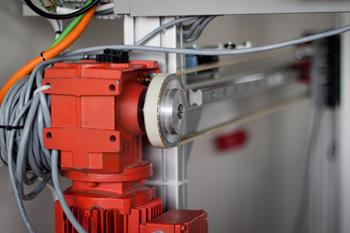
在实施的项目中,机械手在水平轴上的运动由直线导轨上的小车完成。小车与同步带永久连接,同步带由齿轮驱动。主动轮的驱动采用SEW组件。驱动单元为带蜗轮蜗杆的异步三相电机——SEW S37 DT71D4型号,通过同步带轮将驱动扭矩传递给同步带。在电机额定转速下,减速电机输出端获得的速度为n = 135 rpm。传动比为i = 10.23。减速电机的额定驱动扭矩为M = 23 Nm。
Y轴控制
垂直工作运动由交流同步电机配合变频器和斜齿轮完成,斜齿轮将旋转运动转换为线性运动。斜齿轮箱、导轨和小车集成在一个外壳内,使运动部件尺寸相对较小。同步电机的特点是在高功率下具有紧凑设计,额定电压U = 330V时的额定转速为n = 6000 rpm,额定扭矩M = 1 Nm,功率P = 0.63 kW。
The superior control system
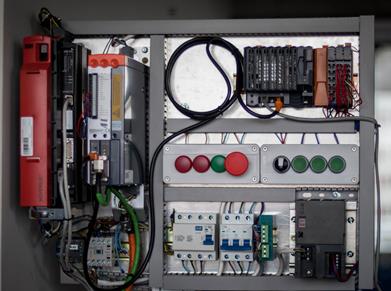
为了根据严格开发的算法实现两个数控轴的无差错运行,采用了贝瑞X20CP1584作为逻辑可编程逻辑控制器的中央控制单元。通过本地工业网络的通信协议采集驱动器的过程数据,从而可以在可编程逻辑控制器执行的控制程序层面监控其状态、功能和参数。
Gripping system
为了正确操作高架仓库,需要抓取元件并将其移动到指定位置。考虑到需要操作两个存储水平以及一个零件收集站,夹持器应能够旋转。
 ,实物 (b))
,实物 (b))
设备的可视化已在IFIX程序中实现。这是一种在波兰自动化市场上使用超过25年的可视化与过程控制系统。它能够对生产过程及设备的各个方面进行精确的监控与控制,使问题响应更快,减少材料消耗,提高质量,缩短新产品上市时间,并提升生产盈利能力。
通过应用可视化,能够持续控制项目中的所有变量。由于在SCADA环境中实现的可视化复制了操作面板的功能,因此可以从配备可视化系统的工作站完全控制高架仓库的运行,而无需操作面板的干预。
SCADA可视化:
- 实现对执行器在两个轴上的运动进行实时运动观察,
- 图形显示仓库的存储水平,
- 支持基本仓库控制功能(各轴回零、自动模式启动),
- 支持附加仓库控制功能(清除驱动器错误、删除寄存器数值),
- 手动控制气动执行系统:旋转执行器和夹持器,
- 以信号灯形式显示过程数据并显示变量值,
- 紧急模式支持,当X轴上的限位开关被触发时启动,这些限位开关用于防止驱动器超出运动范围。
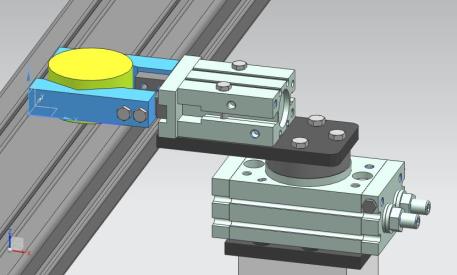
图4中标记的第一个块A和B是用于X和Y轴驱动器的控制块。此外,块B可启用各轴的回零模式。F块显示来自X轴驱动的过程数据,并指示驱动器的运行状态。该信息以虚拟信号灯的形式呈现,其状态随输入信号的值而变化。块C用于显示气动执行器的状态并具有控制其功能的作用。接下来的E块显示有关存储状态的数值信息。在可视化屏幕上,对应的数据为料库中的零件数量可见。G模块是错误复位模块,当X轴驱动超出运动范围时,电机会从电源切断。主模块是D模块,包含执行元件的运动动画。
2. 生产速度和可靠性
生产速度和可靠性——这两者在工业自动化领域中非常重要。技术的发展使得对任何对象的控制能够越来越快且更加精确。每个生产过程都包含多个组件,这些组件的正确组装和按计划运行对于元件的正常实施至关重要。通常,生产线各组件之间的信息必须实时立即传输,以确保循环的正确性。
近年来,应用SCADA系统的工业自动化应用数量显著增加。这些系统不仅用于发电厂等大型企业,也用于较小的生产线。众多优势决定了这些系统的普及。
本文展示了一种高层货架存储设备。该系统被设计为一种教学设备,用于进行自动化系统的研究。此外,该设备配备了SCADA系统,可实现对所有工艺参数的远程监控。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









