



用于毫米波汽车雷达预碰撞测试的替代自行车设计
摘要
本文讨论了一种替代自行车目标的开发,用于评估车载自动紧急制动(AEB)/预碰撞系统(PCS)在使用77吉赫兹雷达系统检测道路上骑自行车的人时的有效性。该替代自行车的设计目标是,在76–78吉赫兹频段内,产生与在美国2014年流行的真实自行车相似的光学外观和雷达响应。此外,若测试车辆以每小时30英里(或48公里)行驶时未能检测到该替代目标,替代骑车人需能够承受车辆撞击。我们的设计方法与欧洲一个研究小组开发的唯一其他替代骑车人不同之处在于,我们的替代骑车人在整个360°方位角范围内均能产生与真实骑车人相似的雷达响应。我们的设计方法首先通过实验表征不同类型真实自行车的雷达散射截面(RCS)模式,并利用精确仿真识别自行车各部件对RCS的贡献,这些仿真也用于设计优化。所制造的替代自行车的RCS性能通过与真实自行车进行360°方位图测量比较得到验证。其物理性能则通过在试验场使用两辆配备AEB和PCS系统的商用车辆进行实际道路测试进行了检验。
索引术语
雷达散射截面,行人检测,汽车雷达,自行车雷达替代目标,碰撞避免。
一、引言
VEHICULAR 雷达已被用于测量车辆前方物体的距离和相对速度,并提升驾驶员在能见度不良条件或盲区中对物体的感知能力。利用雷达回波检测行人在探测距离更长、位置分辨率更高以及适应各种道路和天气条件方面具有优势[10],[11]。汽车工业界正积极进行汽车雷达技术的研究与开发。目前最先进的技术已实现车载雷达系统在智能制动辅助和盲点检测等方面的应用[15]。在欧洲,工作于24吉赫兹的车载雷达目前正在逐步被淘汰,转而采用79‐81吉赫兹频段[14]。美国联邦通信委员会(FCC)针对这些车载碰撞避免应用已分配76‐78吉赫频率频段。整个76‐81 GHz 频段通常被称为77 GHz 频段,其中包括全球长距离雷达(LRR)频带和欧洲超宽带(UWB)频带[27]。除了美国联邦通信委员会(FCC)外,欧洲的国际电信联盟(ITU)和日本总务省(MIC)也针对车载雷达采用了这一标准。
许多汽车公司已经开始开发自动紧急制动(AEB)系统,以避免或减轻行人和骑车人碰撞事故[6],[8]–[10]。自动紧急制动系统也被称为即将发生碰撞制动系统或预碰撞系统(PCS)。这些系统还可在制动前直接向驾驶员发出警告。
此类系统的有效性需要通过标准化测试程序进行准确测试,而国际汽车工业界和政府机构尚未就此达成一致。此类标准有助于消费者和政府监管机构评估每辆配备自行车自动紧急制动(BAEB)功能的车辆的实际BAEB能力。此外,它还提供了有关车辆对误报自行车碰撞的响应信息,因为误报警告和紧急制动可能构成驾驶危险。
显然,使用真实骑车人和行人进行这些测试既不实际也不安全。因此,这些标准化测试的关键要素是标准替代目标,其能够产生与真实车辆、行人和自行车相似的传感器响应。此外,此类标准目标需要能够承受被测车辆(VUT)的冲击而不损坏VUT,并在撞击后易于重新组装。目前,标准77GHz替代行人和自行车目标仍在由国际社会开发和评估。我们工作的主要贡献是制造一种高保真替代自行车目标,适用于评估77 GHz汽车雷达检测骑车人的有效性。替代骑车人由替代骑行者和替代自行车组成。陈等[1]开发的替代行人可直接用作骑行者替代模型。然而,仍需要一种替代自行车设计,因此本文的重点即在于此。
在77吉赫下通过实验表征雷达响应并非易事,且由于波长极短,通常难以准确测量,可能导致雷达响应对细微变化极为敏感。
II. 77 GHz车载雷达目标开发简要回顾
能够产生与真实目标相似的雷达响应,并能在测试中承受被测车辆冲击的77 GHz车载雷达替代目标的可用性,对于评估和比较不同汽车制造商正在开发的雷达系统的有效性至关重要且迫切需要[12]。使用替代目标来评估自动紧急制动(AEB)和碰撞预防系统(PCS)并非新概念。2009年,欧洲新车安全评鉴协会(Euro NCAP)引入了针对车辆中新实施技术的评级方案和测试场景,用于评估追尾碰撞避免系统[2]。这推动了欧洲NCAP车辆目标(EVT)的发展,该目标通过对比测试流程开发,截至2014年已更新至第三版,即最终版本。然而,目前尚无EVT与实际车辆在76‐78吉赫频段雷达响应之间的对比数据。此外,EVT仅表示车辆的后方。美国国家公路交通安全管理总局(NHTSA)也开发了可撞击替代车辆(SSV),密歇根理工研究院(MTRI)测量了其在94 GHz的雷达响应,并与多种商用乘用车的响应进行了比较[3]。但SSV同样仅针对追尾碰撞场景设计。目前,美国和欧洲正在开发新的全三维替代测试车辆目标,以支持被测车辆更宽广的视角。
由4a工程公司在欧洲开发的[4]和交通安全研究所在美国开发的[1]两种用于77 GHz车载雷达测试的替代行人目标已分别研制成功。这些行人假人旨在设计成在光学外观和雷达特征上与道路上的真实行人相似。TASI的替代行人具有可活动的手臂和腿部,并覆盖有多层导电织物,该织物根据真实人体雷达散射截面测量结果和电磁仿真[1],[6]专门设计,以在77吉赫下产生与干燥人体皮肤相似的反射率。
替代骑行者目标目前正在由4active系统公司和交通安全研究所分别进行开发和测试。这两辆替代自行车分别基于荷兰和美国两种流行的现实自行车设计而成,均可在77 GHz频段运行。交通安全研究所代理特征包括人体模型骑手的踩踏动作和静止车轮。4active系统公司代理特征包含旋转车轮,但忽略了踩踏动作。
III. 77吉赫自行车散射实验研究
A. 自行车散射模式测量设置
雷达目标的反射率由其雷达散射截面(RCS)[21], 表征,这是一个归一化量,仅对应于目标自身的反射率,与雷达、天线和波形无关。因此,RCS可用于比较不同目标的雷达反射率以及不同雷达系统对同一参考目标的性能。这使得RCS成为定量比较雷达替代目标与真实目标反射率的理想参数。通常,RCS数据在频域中进行测量。在本例中,自行车和替代自行车的RCS测量范围为76.5至77.5吉赫,步进为20兆赫,中心频率为77吉赫。测量在4.7米的距离上进行,收发天线增益为23 dBi。77频段的RCS被认为相似。对于76‐78吉赫的频率,相对带宽仅为2.5%。有关精确的RCS测量设置和校准技术的更多细节可参见[16]–[20]。其他进行类似研究的有用文献可参见[3],[5],和[13]。涉及RCS和测量的一般概念可参见[20]。
由于车辆目标可能从不同角度被接近的车辆观测到,因此替代目标需要能够在较宽的方位角范围内产生与真实目标相似的雷达散射截面,这通过在360度方位角范围内测量雷达散射截面数据来表征。然而,在77吉赫频率下测量自行车的雷达散射截面图样具有挑战性,原因是波长非常短,约为3.9毫米。相对于波长而言,目标尺寸较大(自行车和骑行者),导致在方位面上随观测角变化产生快速的图样波动。此外,不同自行车部件的复杂性进一步加剧了最终雷达散射截面模式的复杂程度。
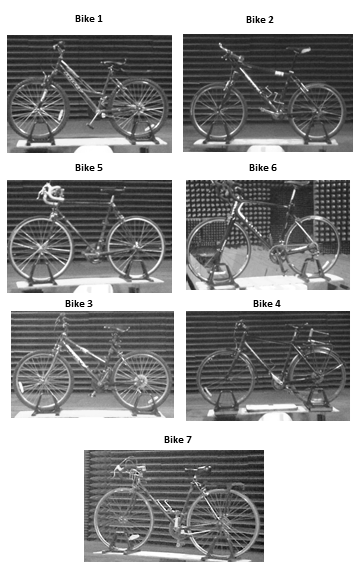
在俄亥俄州立大学电科学实验室的消声室内对骑自行车的人进行了雷达散射截面模式测量,测量了7种不同尺寸、形状和车架材料的自行车,以研究不同类型自行车之间的雷达散射截面变化。每辆被测自行车均放置在消声室中心,并以0.1°为步进采集完整的360°方位模式的后向散射数据。反射测量系统由一个2端口矢量网络分析仪(VNA)组成,该分析仪以20 MHz为步进将频率从12.5 GHz扫描至13.5 GHz。前端上下变频模块随后通过与64 GHz的本振信号混频,将信号上变频至76.5‐77.5吉赫。
通过背景散射消除和时域门控,去除了背景散射以及收发天线之间的直接耦合,以提高测量数据的信噪比。通过对测量数据进行校准,获得了自行车的雷达散射截面水平。
一个直径为12英寸的导电球体,其理论雷达散射截面(RCS)值可通过米氏解[20]获得。此前研究表明,该校准方法的不确定性约为1 dB [17]。测量距离必须足够远,以确保目标完全位于天线的半功率波束宽度(HPBW)范围内。需要注意的是,即使自行车发生轻微倾斜,也可能导致显著的反射率变化。因此,在测量过程中必须格外注意自行车的安装与对准。
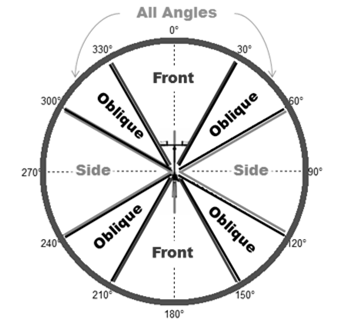
雷达散射截面模式数据针对7种不同尺寸、形状和分类的自行车进行采集,旨在探究不同自行车之间的雷达散射截面变异性,如图1所示。图2展示了在77吉赫单一频率下,自行车相对于相应方位角的指定区域示意图。
B. 测量的自行车散射模式结果
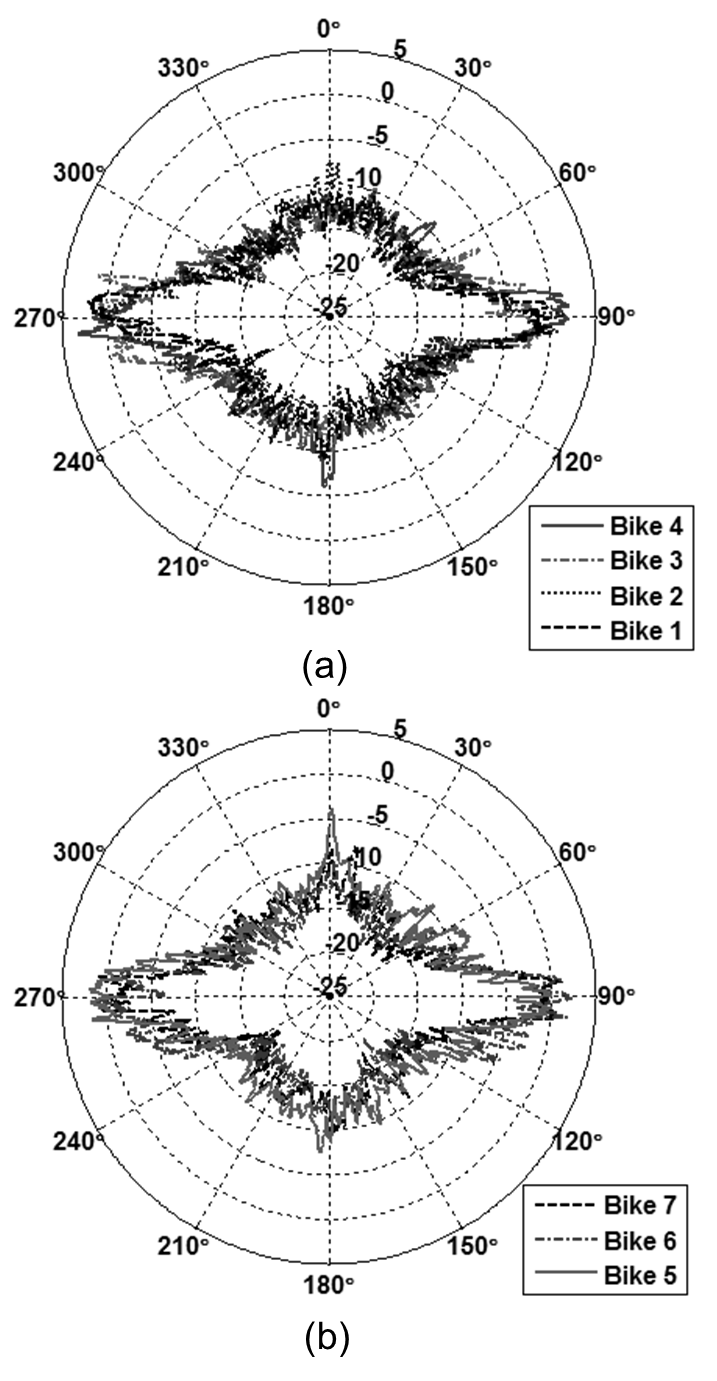
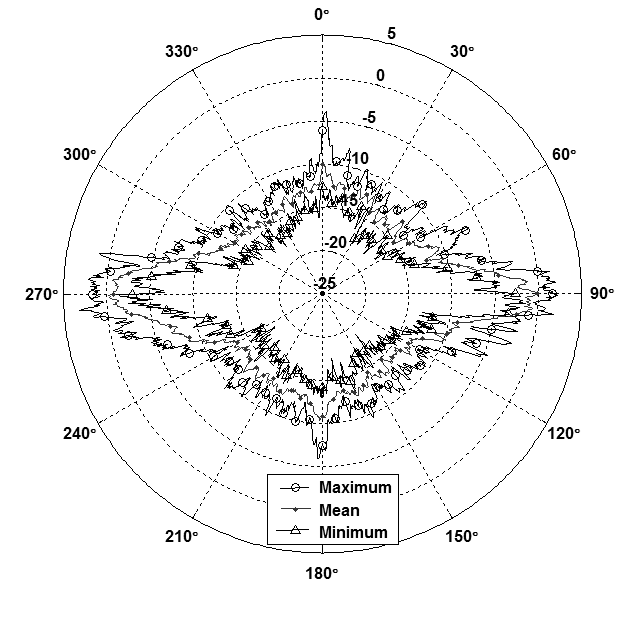
图3绘制了7辆无骑行者的自行车经过2°移动平均平滑处理后的校准雷达散射截面图样。7辆自行车在每个方位角上的最大、平均和最小雷达散射截面值如图4所示。这些结果表明不同自行车之间的雷达散射截面模式相似,变化幅度约为5 dB。因此,总体变化趋势在
 自行车#1‐#4 和 (b) 自行车#5‐#7)
自行车#1‐#4 和 (b) 自行车#5‐#7)
自行车车架对图样的总体水平和形状影响很小。注意,公路自行车#6 是一种轻量自行车,其车架为碳纤维材质而非金属材质。值得将其雷达散射截面模式与图5所示的金属车架自行车的平均雷达散射截面模式进行比较。
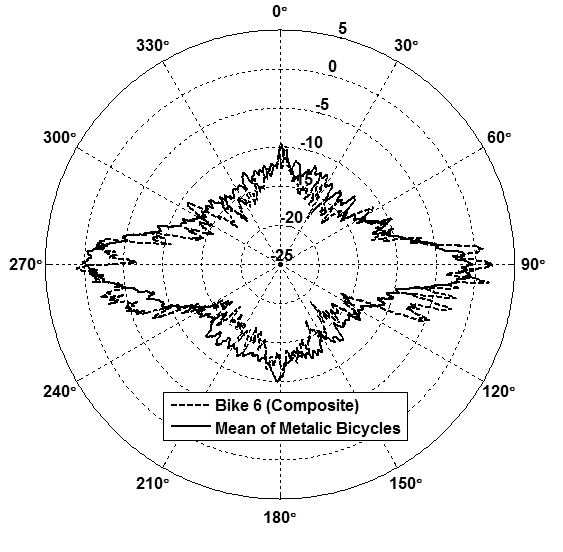
观察发现,采用碳纤维车架的自行车在形状和幅度上的雷达散射截面模式相似。这可以解释为:在77吉赫频率下从侧视角度观测时,自行车的散射主要由金属轮圈主导。
尽管2°移动平均平滑在揭示雷达散射截面图样总体特征方面很有用,并且由于目标尺寸相对于波长较大,可避免随角度变化而产生的快速图样波动,但在实际雷达场景中无法进行此类平滑处理,因为在这些场景中仅能获得单个观测角度。获得平滑雷达散射截面数据的另一种方法是在多个频率上进行平均。为了说明这一点,采用了线性尺度下的平均雷达散射截面模式数据
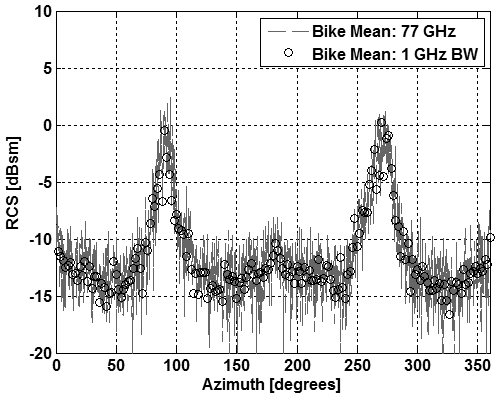
在每个角度上,通过对7辆自行车(#1−#7)的76.5吉赫至77.5吉赫范围内的101个频率数据点(即1吉赫带宽)计算雷达散射截面幅度的平均值(在线性尺度下),对结果进行“平滑”处理。所得的7辆自行车带宽平均后的雷达散射截面图样如图6所示,与单频原始雷达散射截面响应进行了比较。图6还表明,如前所述,雷达散射截面在76.5吉赫至77.5吉赫带宽范围内是相似的。需要注意的是,使用1吉赫带宽进行频率平滑后的平均雷达散射截面图样与III-B中2°移动平均平滑后的平均雷达散射截面图样非常相似,不同之处在于频率平均图样仍然存在较多的图样振荡。[23]中也采用了类似的带宽平均方法来计算雷达散射截面模式。
IV. 自行车散射的分析分析
本节中使用的仿真技术此前已在[1],和[16]–[20]中研究并验证。使用FEKO [26]仿真工具对真实自行车的数值模型进行了仿真。执行这种计算量大且耗时的仿真的主要目的是验证上一节[22]中讨论的测量结果,并且更重要的是,识别来自自行车不同部件的散射贡献。典型自行车的主要部件包括车架、辐条、链轮、车轮和座椅。如前所述,由于77吉赫附近的极短波长,测得的自行车散射数据容易受到定位与对准误差和不准确性的影响。数值模型仿真则不受此类问题影响。相反,仿真结果中的误差主要与数值模型的几何结构、材料属性的准确性以及所用数值求解器的方法有关。本文的结果基于物理光学(PO)近似,该方法忽略了边缘和角落的衍射。尽管PO解并非精确解,但由于波长非常短,边缘衍射效应被最小化,因此在本例中其速度更快且具有足够的精度。FEKO仿真中的所有对象均为理想电导体(PEC)。
市面上可以获取到非常详细的自行车计算机辅助设计模型[27]。然而,此类计算机辅助设计模型中的原始几何结构通常包含大量精细网格,往往会显著增加计算资源和时间。因此,首先在FEKO中对计算机辅助设计模型进行了简化和重新划分网格,以节省仿真内存和时间,同时不降低精度。
随后,自行车CAD模型计算了如图7(a)所示的不含车轮的各种自行车构型的散射幅度和散射模式。图7(b)绘制了对应于图7中三种构型的计算得到的雷达散射截面随方位观测角的变化关系。需要注意的是,这些数据已使用2°的移动平均窗口进行了平滑处理,与第二节的分析保持一致。通过比较这些数据可以发现,仅金属车架在大多数角度区域的贡献微不足道,但在侧向和后方区域,其经过角度平滑后的雷达散射截面水平比其他两种情况大约低5至10 dB。增加座椅、链轮、脚踏板、前叉和车把后,雷达散射截面水平显著提高,在侧向区域附近达到约+15 dBsm,在斜向区域附近达到−10 dBsm,在前后区域附近达到−5 dBsm。
在这三种情况下,最大雷达散射截面水平均出现在侧向观测角区域。这些结果还表明,添加链轮似乎对整体雷达散射截面的贡献极小。加入车轮显著提高了雷达散射截面水平,并改变了雷达散射截面图样。雷达散射截面模式的侧向角度(如图2所述)主要由自行车轮决定。根据本研究,显然最关键的
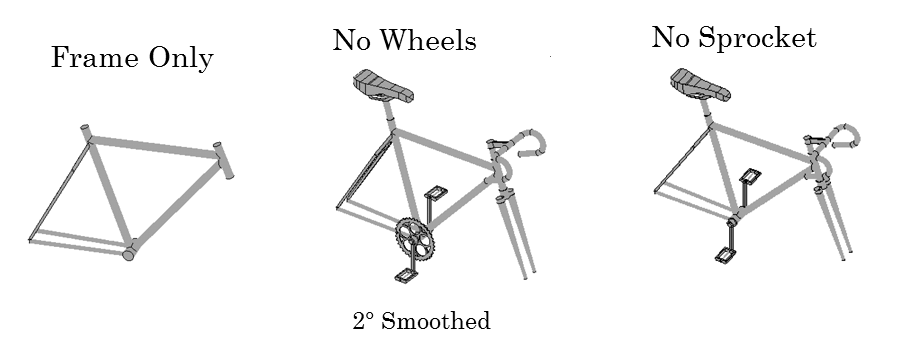 除车轮外的自行车部件数值模型 (b) 自行车部件雷达散射截面模式的2度平滑仿真结果)
除车轮外的自行车部件数值模型 (b) 自行车部件雷达散射截面模式的2度平滑仿真结果)
在为77 GHz 频段设计精确雷达替代自行车时,一个重要任务是开发一种能够产生准确雷达散射截面图样和幅度的替代式自行车轮设计。
V. 77吉赫 自行车替代物设计
我们的自行车替代物设计要求包括:
a. 在77吉赫下产生与真实自行车相似的雷达散射截面大小和模式。
b. 外观上对摄像头呈现真实自行车和骑者的样貌。
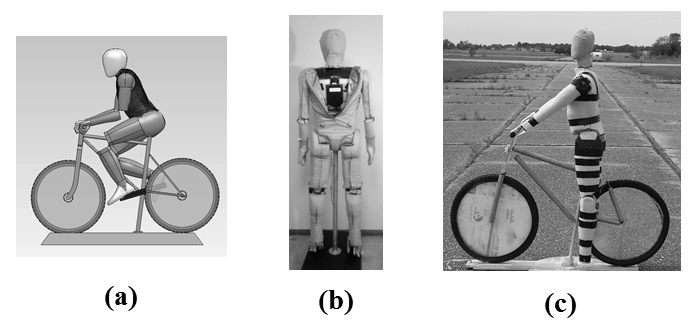
c. 支持由雷达假人骑乘时产生的踩踏动作,如图8所示,以产生正确的微多普勒响应。
d. 总重量(自行车和骑手替代模型)小于20公斤,以便于在滑橇上轻松移动。
e. 坚固设计能够承受30英里/小时(或48公里/小时)的碰撞,而自身及测试车辆均不受损坏。
尽管自行车种类繁多(例如山地自行车、700C自行车、赛车自行车等),且尺寸各异(从18英寸到30英寸);但全球几乎所有的自行车结构都相似。本文以最流行的成人26英寸轮山地自行车作为实现示例。其他尺寸的自行车替代物可参照以下步骤进行设计。
骑车人替代模型由五个主要部分组成:骑手替代模型、自行车车架、脚踏板、车轮和轮胎。所有这些部件均经过特殊设计,以满足上述要求。每个部件均由轻质且耐撞的材料制成,并在碰撞时分离。所有部件在碰撞后可在5分钟内重新组装,以便进行下一次测试。
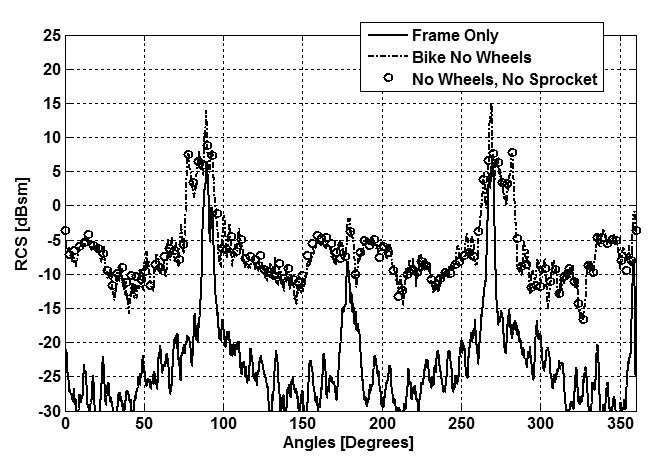
图8(b)所示的骑手替代模型尺寸基于美国成人的50th百分位尺寸。所有肢体关节(即肩部、肘部、髋部和膝盖)均可实现主动或被动旋转运动。骑手身体由轻质闭孔泡沫制成,并覆盖有人造皮肤,使其从360度各个角度观察时产生的雷达散射截面与同等尺寸的人体相似。请注意,雷达骑手模型的详细设计不在本文范围之内[1]。
自行车替代物的车架由一组直的、耐碎裂的聚碳酸酯管制成。自行车替代物的整个车架由座管支撑。座管由直径约为20毫米的坚固金属或塑料管(聚碳酸酯或胶木)制成。可使用一层薄泡沫覆盖所有管材,以起到缓冲冲击的作用。最后,在泡沫外层包裹一层高导电织物,以产生与大多数真实自行车上的金属车架相同的雷达效应。真实自行车的车架主要由金属圆管构成。因此,通过适当选择所述导电织物和覆盖泡沫的抗碎裂聚碳酸酯管,可使其在测试中承受可能的冲击,同时产生与真实自行车车架相似的散射贡献。
如前所述,在侧视区域中,自行车在77吉赫下的散射主要来自车轮,而车轮的散射又主要由辐条和轮圈侧面的散射构成。因此,设计一个能够产生与真实自行车轮相似幅度和雷达响应模式的替代车轮,成为设计替代自行车时最重要的任务。我们首先利用FEKO电磁仿真,针对一个几何结构和尺寸尽可能接近实际自行车轮的数值车轮模型进行了仿真,如图9(a)所示。对于当前关注的24英寸直径车轮,轮胎宽度为2英寸,轮圈壁高为0.4英寸。由于最终的替代车轮将使用真实轮胎,因此设计重点在于不含轮胎的替代车轮。为了验证仿真数据的有效性,图9(b)中的底部曲线对比了无轮胎的24英寸自行车轮的实测与仿真雷达散射截面图样。在轮圈正侧面观察到的峰值雷达散射截面响应
 自行车轮仿真模型及实测车轮的图片。(b) 自行车轮测量与仿真的雷达散射截面模式比较)
自行车轮仿真模型及实测车轮的图片。(b) 自行车轮测量与仿真的雷达散射截面模式比较)
(即90度)的仿真数据和测量数据分别为13.3 dBsm和11.8 dBsm。总体而言,测量与仿真得到的雷达散射截面水平和雷达散射截面图样之间具有合理一致性,差异在约 +/-5 dB以内。需要注意的是,仿真数据在70°至85°之间的雷达散射截面水平明显更高,而图10显示该区域主要由辐条主导。这可能是由于实测车轮的辐条存在轻微弯曲,而在仿真模型中并未体现这一情况。此外,本次仿真和测量均未包含齿轮型链轮,但另一次未在此展示的研究发现其对车轮的雷达散射截面图样影响较小。
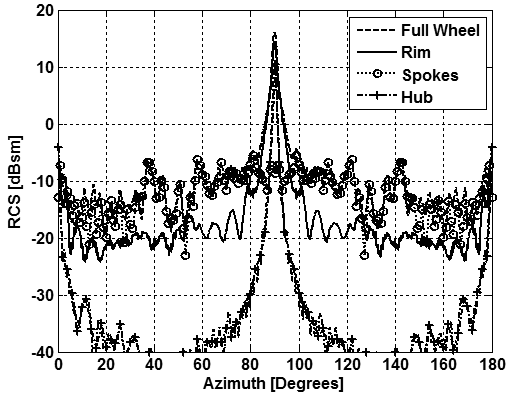
仿真与测量结果的一致性使我们能够分析车轮不同部分的散射贡献,从而将替代车轮的设计简化为仅保留主要部分。例如,图12比较了轮毂、轮圈和辐条这三个主要部件在2°移动平均处理后的仿真雷达散射截面模式。观察发现,在83°至97°角度区域内出现强烈的雷达响应,且主要由金属轮圈的散射所主导。在小于83°和大于97°的角度范围内,辐条的散射主导了雷达响应,但在接近0°(前方)和180°(后方)的区域除外,这些区域中轮圈宽度带来的散射占主导地位。然而,当存在骑行者时,在前后视角附近的散射最终将由骑行者本身的散射所主导。
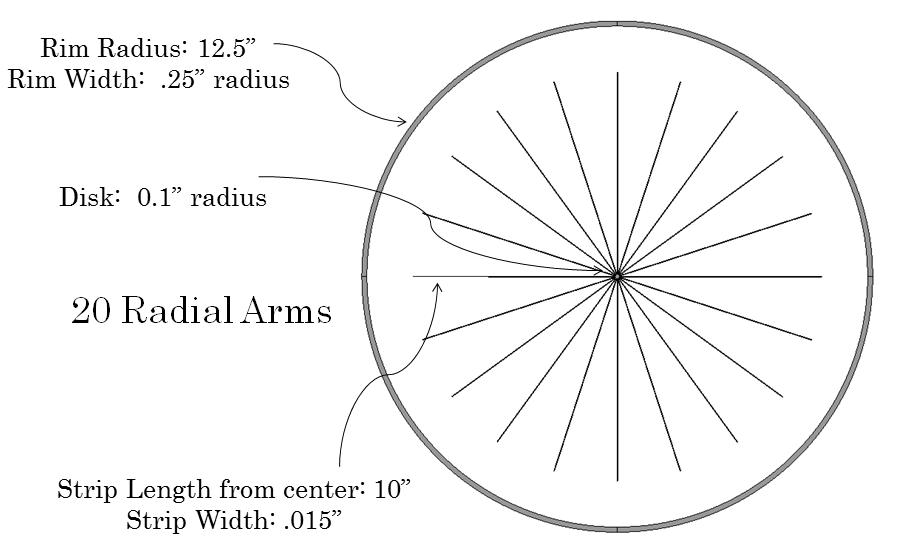
受上述发现的启发,设计了一种简单的替代自行车轮(图11),由四个部分组成。(1)在薄圆形透明塑料盘上层压多个导电径向条,以产生与真实车轮辐条相似的散射效果。(2)位于圆盘中心的小型圆形导电贴片,可产生与车轴和链轮相似的散射效果。(3)在圆盘边缘环绕的圆形金属条,可在侧视角度附近产生与轮圈相似的散射效果。最后,(4)在圆盘边缘安装一个实际的自行车轮胎。
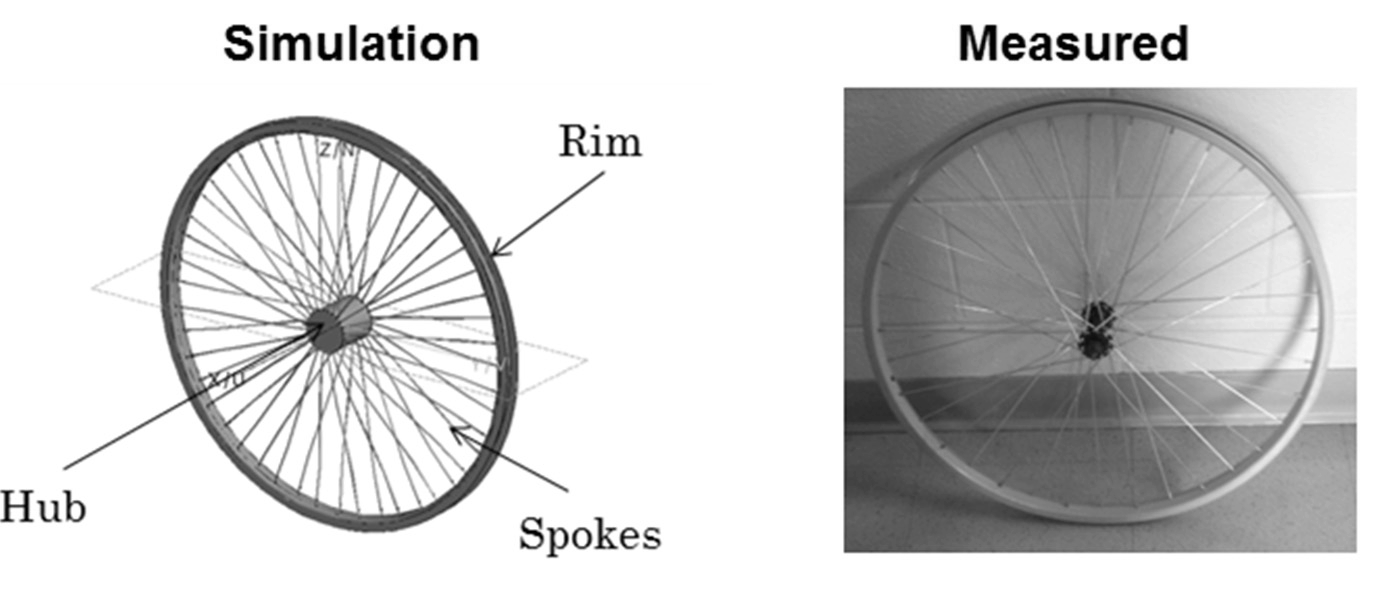
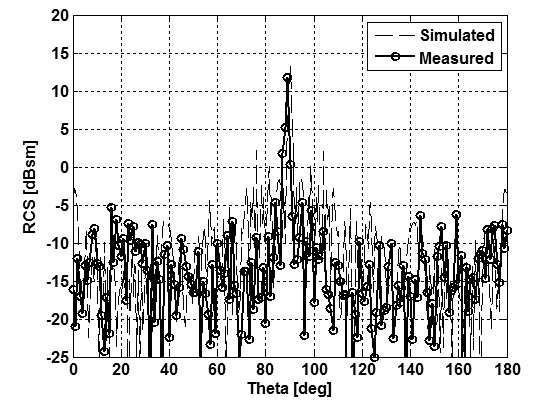
图11展示了所提出的雷达替代车轮设计的物理尺寸。该设计采用两层直径为26英寸、厚度为0.125英寸的透明聚碳酸酯板作为支撑材料。从中心开始,二十根10英寸长且等间距分布的径向导电条用于产生与车轮辐条相同的散射效应。一个直径为0.2英寸的中心圆形导电贴片用于产生车轴的散射效应。
A. 替代轮研究
导电径向条用于产生与真实自行车车轮辐条相似的雷达散射效应。每个径向条带呈梯形,如图12(a)所示,其起始宽度和终止宽度分别为Ws和We。当We = 0时,条带形状变为如图12(c)所示的三角形。当We = Ws时,条带形状变为如图12(b)所示的矩形。如图13所示,通过选择合适的参数,可调节该设计的散射幅度和散射模式
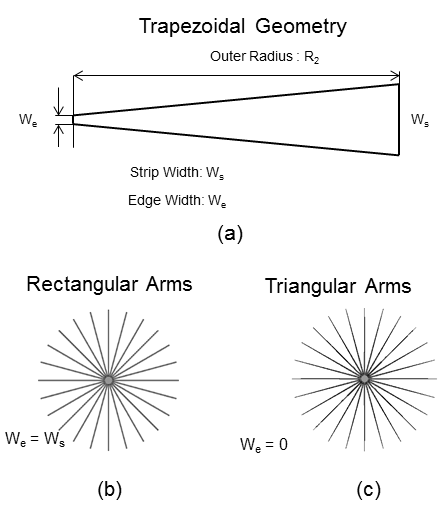
不同数量的条带、起始宽度和终止宽度,以产生与具有复杂三维排列的真实辐条相似的散射。
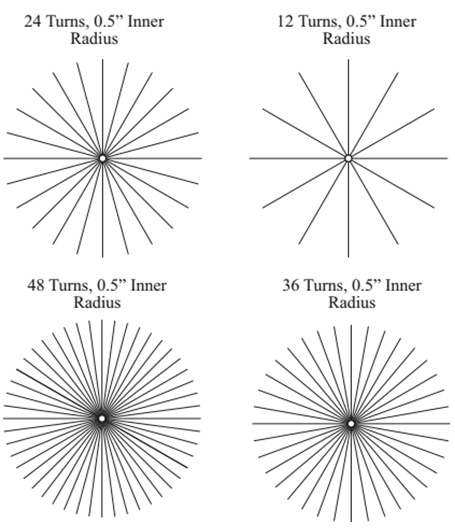
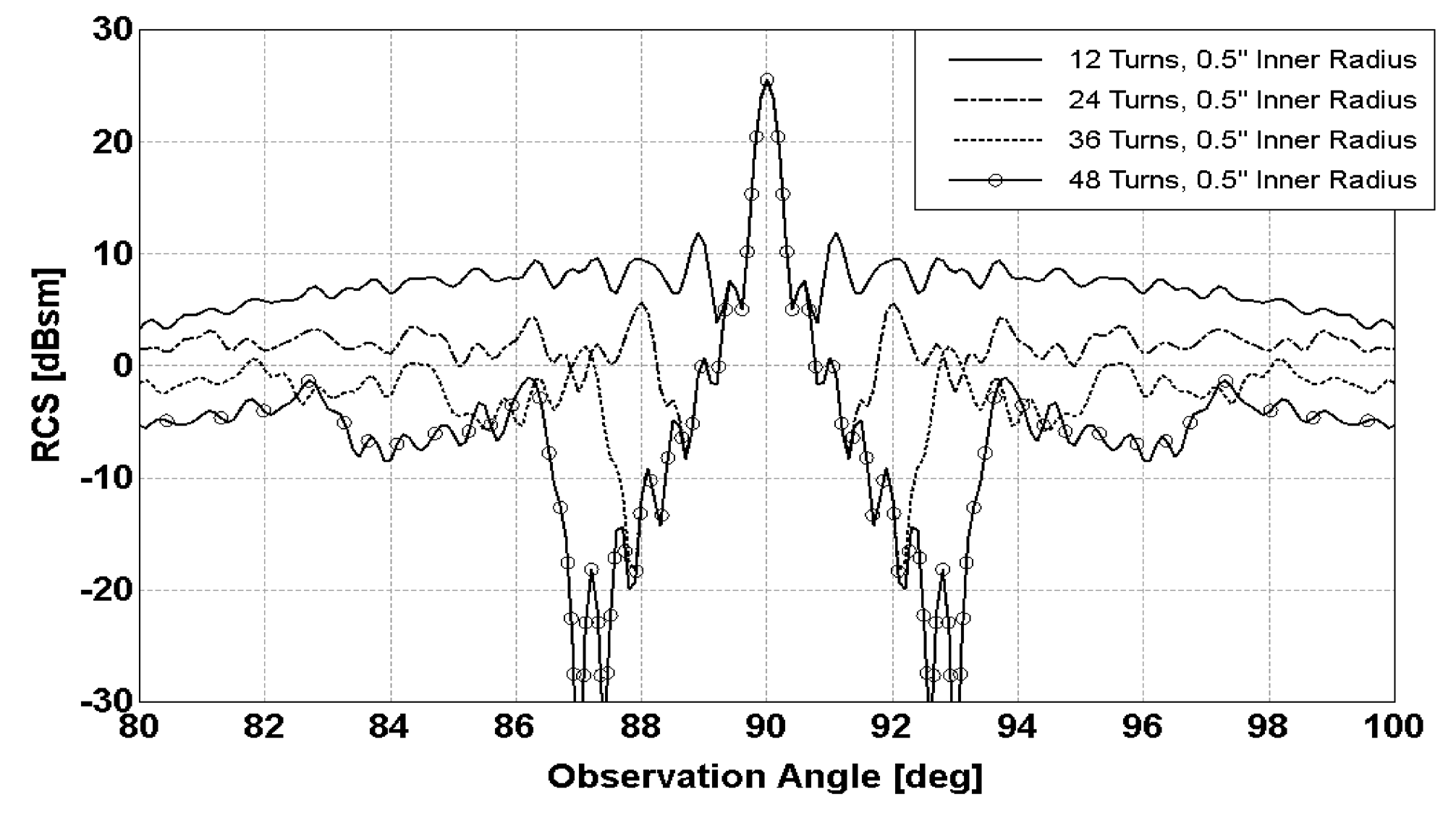
图14绘制了四种不同数量矩形条带的计算雷达散射截面模式:48、36、24 和 12。这四种情况在 90度 处产生相同的峰值雷达散射截面水平,这是预料之中的,因为在每种情况下,条带的宽度选择使得所有条带的总面积总和相同。注意,在所有情况下,中心圆形贴片的半径固定为 0.5英寸。图14 还显示,增加条带数量会产生更均匀分布的散射,即更类似于连续板,从而在接近 90度 处形成更集中的定向图样。本研究证明,可以通过条带数量来调整 90度 附近的散射模式形状,以实现实线所示的期望响应,该响应对应于图9 所示整个车轮模型的仿真响应。
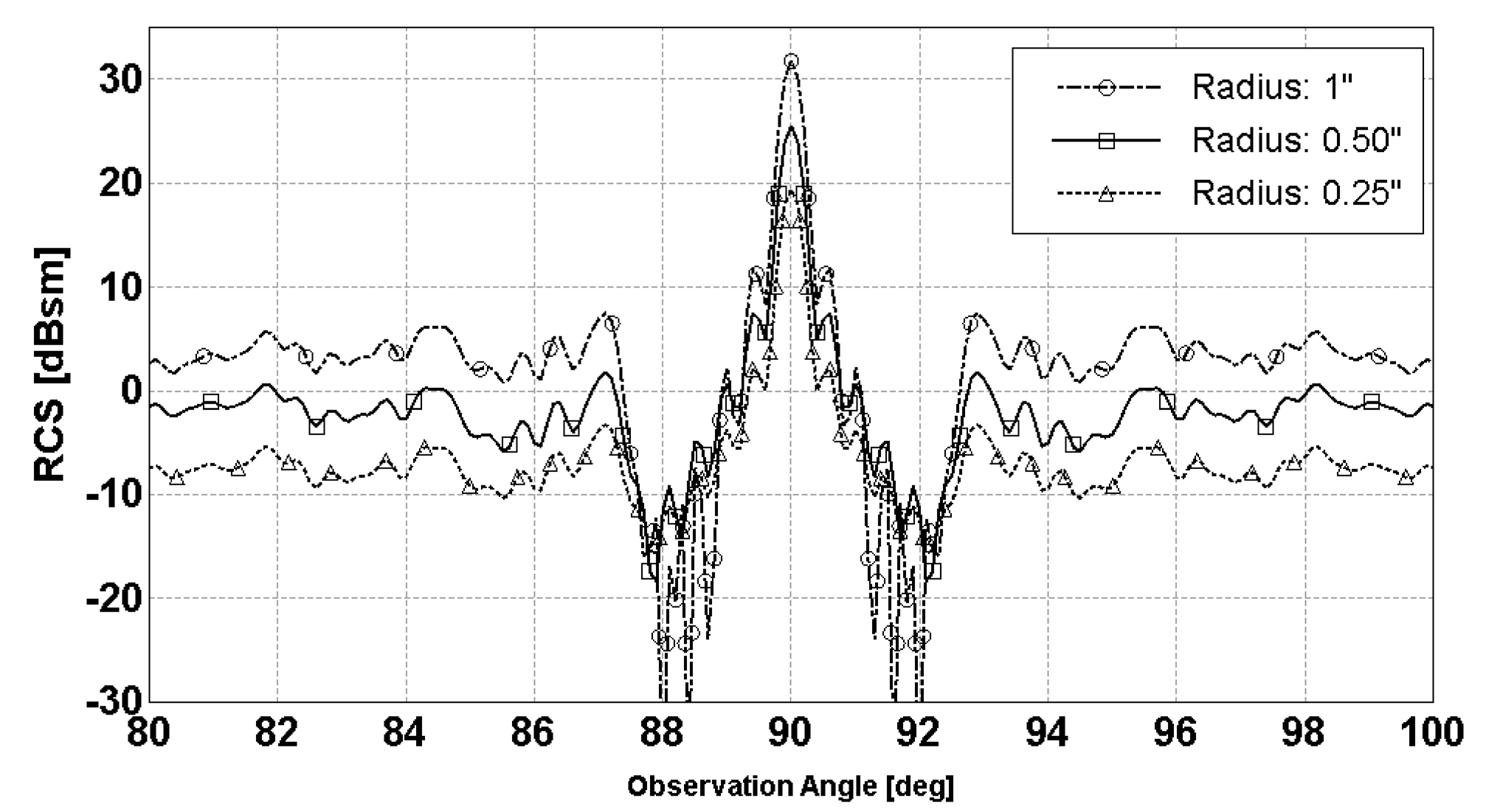
针对三种不同半径(0.25英寸、0.5英寸 和 1英寸)的中心圆形贴片尺寸进行了研究。图15 绘制了这四种情况下的相应散射模式。较大的圆盘尺寸会导致峰值响应区域之外的响应增强,而此前已表明辐条在此区域开始起作用。如果圆盘尺寸过大,则可能在以辐条为主导的区域产生大于期望的模式响应。因此,选择较小的贴片尺寸。
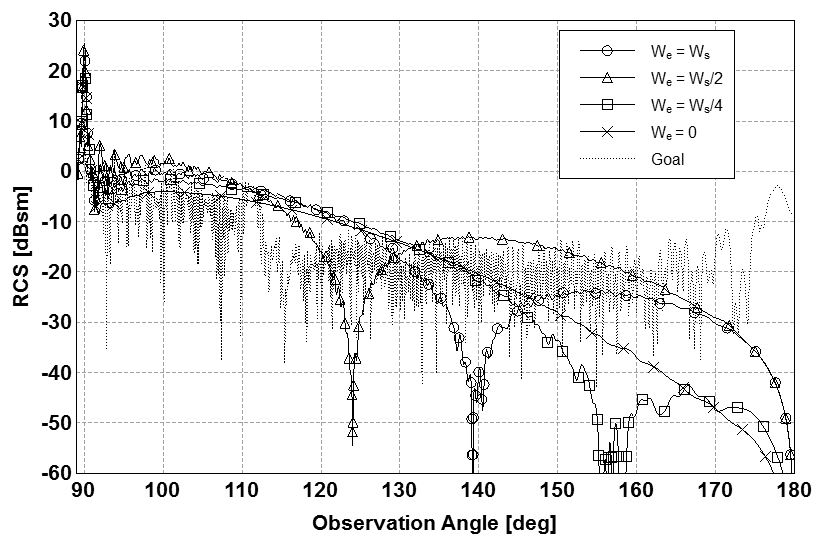
梯形条带的形状可用于调整从前向和后向视角超出+/-30°区域的更全局的雷达散射截面模式。这一点在图16中得到验证,该图比较了四种不同条带形状的模拟雷达散射截面图样:We= 0、We= W s、We= W s/2 和 We= W s/4。所有这些情况都有24个径向条带。目标线是车轮仿真。沿径向方向变化的条带宽度分布会移动有效散射区域在径向方向上的位置。这从模式零点角度位置的移动中可以明显看出,该零点是由斜角方向上散射区域两侧的反相干涉引起的。例如,在We=Ws/4情况下,有效散射区域更靠近中心,导致零点移动到离90度更远的角度。
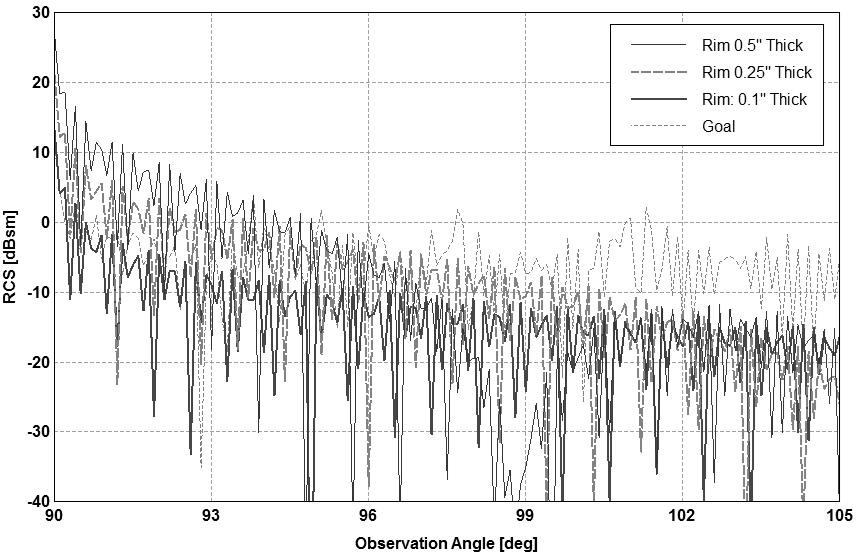
轮圈的峰值雷达散射截面幅度与其圆形条带的宽度直接相关,如图17所示,该图比较了在侧视角度附近0.1英寸、0.25英寸和0.5英寸侧边宽度下的计算得到的雷达散射截面图样。条带越宽,散射越强。结论表明,在80°–100°区域内,0.25英寸的条带宽度产生的雷达散射截面水平最为接近。这代表了各曲线之间的一个良好折衷。尽管如此,其18 dBsm的峰值响应略高于完整轮毂模型仿真得到的13 dBsm峰值。由于实际生活中难以实现精确对准,该峰值不太可能被观测到[24]。因此,雷达散射截面图样的形状比峰值响应更为重要。
VI. 替代自行车测量
A. 雷达性能测试
图18(a)左侧图片显示了仿照最受欢迎的成人26英寸轮山地车制作的替代自行车
 替代自行车和真实山地自行车安装在消声室内转台上的照片,用于雷达散射截面模式测量;(b) 在77吉赫下替代自行车与真实山地自行车的实测与5°平滑雷达散射截面模式的比较)
替代自行车和真实山地自行车安装在消声室内转台上的照片,用于雷达散射截面模式测量;(b) 在77吉赫下替代自行车与真实山地自行车的实测与5°平滑雷达散射截面模式的比较)
美国的自行车模型,如图18(a)右侧所示。两种自行车的360°雷达散射截面模式数据均在消声室内以0.1°的间隔采集。目标安装在转台上,所得的2°平滑雷达散射截面数据在图18(b)中进行了比较,显示出在图样和幅度上具有非常好的一致性。
B. 物理耐久性测试
替代自行车在车辆自动紧急制动测试中预计能够承受多次碰撞,并仅需进行轻微的现场维修,而原型替代自行车已证明满足这一要求。在700次车辆自动紧急制动测试中,发生了百余次碰撞(许多测试中车辆自动紧急制动避免了碰撞)。在专门设计用于记录替代自行车维修时间的26次碰撞测试中,碰撞速度在13至39 km/h范围内的11次测试无需维修;碰撞速度在40至56 km/h范围内的15次测试中,有3次进行了现场轻微维修(5–10分钟),2次进行了现场中等维修(10–20分钟)。碰撞测试期间发生的冲击情况如图19所示。
七、结论
在76.5–77.5吉赫频率下,针对七种不同类型和车架材料的自行车的雷达散射截面(RCS)图样测量结果进行了展示。RCS仿真在单一频率77吉赫下进行,这是可接受的,因为在76–78吉赫带宽范围内波长差异仅为2.5%。RCS测量在4.6米距离处进行,因此不能反映真实的远场测量情况。真实的远场测量将导致更高的RCS值。然而,第三节中讨论的RCS研究对于替代自行车的设计具有重要意义。此类测量由于77吉赫频率下的波长极短,需要非常精确的定位与对准。未来的实验应探索更优的安装方法,以精确确定自行车RCS的峰值水平,从而提高测量精度。
在侧向观测角度测得的最大值为 ∼5 dBsm。自行车正前向观测角度的RCS值为 ∼0 dBsm。这七辆无骑行者的自行车的平均RCS图样呈现出菱形形状,其主轴(即最强后向散射方向)位于侧向观测角度(90度和270度)方向。对频率范围内的RCS进行带宽平均导致雷达散射截面图样在雷达散射截面水平上的波动较小。
本文提出的最终完整自行车替代物在雷达散射截面图样形状和水平方面,与其直接设计来源的自行车高度一致。车轮设计需要更严谨的研究方法;本文仅提出了一种简单的平面替代车轮设计。必须开展研究以验证替代自行车上方人体模型骑行者的有效性。两者各自已被证明具有正确的雷达散射截面水平和图样,但二者的组合效果仍需进一步研究。未来的研究将探讨骑行者腿部蹬踏动作引起的车轮旋转所产生的微多普勒特性影响。这些特性是目标所独有的,有助于BAEB系统区分自行车与其他目标(如行人和汽车)。

















 1015
1015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









