 毫米波雷达信号处理与相控阵技术
毫米波雷达信号处理与相控阵技术







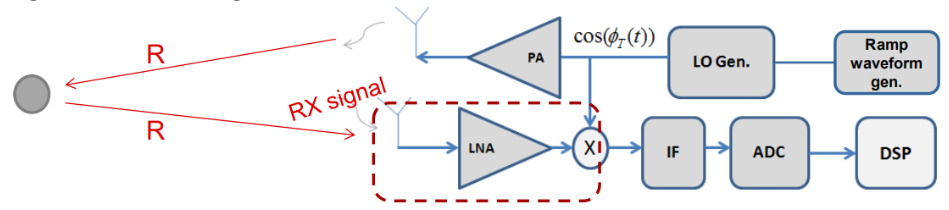
3.3 接收信号模型:目标反射与信号衰减
接收信号是发射信号经目标反射后的 “延迟版 + 衰减版 + 频移版”,需同时考虑时间延迟(对应距离)、信号衰减(对应探测范围)和多普勒频移(对应速度),三者共同构成接收信号的核心特征。
3.3.1 核心 1:时间延迟 —— 距离的 “直接映射”

延迟与距离的推导
电磁波在空气中传播速度近似为光速c=3×10^8 m/s,传播路程为 “雷达→目标→雷达” 的往返距离2R,因此:

时间延迟关键参数表
|
参数符号 |
定义 |
单位 |
典型值(车载场景) |
物理意义 |
关联公式 |
|
信号往返时间延迟 |
s |
0.1μs~10μs |
电磁波往返目标的时间,越小表示目标越近 | ||
|
R |
雷达与目标的直线距离 |
m |
15m(近距)~150m(远距) |
核心测量目标,决定雷达的探测范围 | |
|
c |
光速(电磁波传播速度) |
m/s |
\(3×10^8\) |
恒定物理量,空气中近似等于真空中速度 |
- |

3.3.2 核心 2:信号衰减 —— 探测距离的 “天花板”
接收信号的幅度会比发射信号大幅衰减,衰减来源包括路径损耗(最主要)、目标反射损耗和雷达内部损耗,最终接收信号幅度需满足 “信噪比(SNR)≥检测阈值”,否则目标无法被识别。
雷达方程:量化衰减与接收功率
雷达方程是描述 “发射功率→接收功率” 关系的核心公式,完整表达式为:
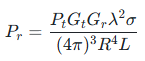
雷达方程参数拆解表
|
参数符号 |
定义 |
单位 |
典型值(车载 77GHz 雷达) |
对接收功率的影响 |
|
接收天线输出功率 |
W |
核心输出量,需≥ADC 检测阈值(通常≥-100dBm) | ||
|
发射天线输入功率 |
W |
0.01W(10mW,10dBm) |
正相关: | |
|
|
发射天线增益 |
无(dB 表述) |
15dBi(线性值≈31.6) |
正相关:增益越高,电磁波方向性越强,衰减越少 |
|
接收天线增益 |
无(dB 表述) |
15dBi(线性值≈31.6) |
同\(G_t\),接收端增益提升可增强信号 | |
|
毫米波波长 |
m |
0.00389m(3.89mm) |
正相关:波长越长,衰减越小(如 24GHz 比 77GHz 衰减小) | |
|
目标雷达散射截面(RCS) |
m² |
汽车≈10m²,行人≈1m²,自行车≈0.5m² |
正相关:目标越大,反射信号越强(如卡车 RCS 远大于摩托车) | |
|
R |
雷达与目标距离 |
m |
- |
强负相关:\(R^4\)项!距离翻倍,\(P_r\)衰减 16 倍(24dB) |
|
L |
系统总损耗 |
无(dB 表述) |
10dB(线性值≈10) |
负相关:损耗包括天线损耗、电缆损耗等,需尽量降低 |

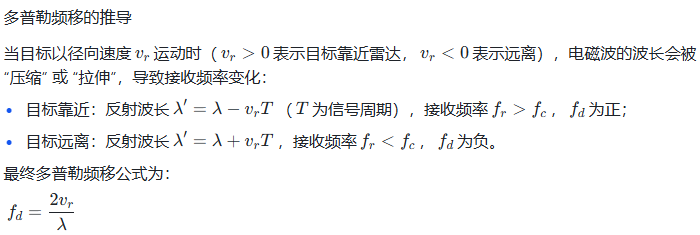
3.3.3 核心 3:多普勒频移 —— 速度的 “专属信号”
若雷达与目标存在径向相对运动(靠近或远离),接收信号的频率会发生偏移,这种偏移称为 “多普勒频移”![]() ,是测量目标速度的唯一依据。
,是测量目标速度的唯一依据。
多普勒频移参数表
|
参数符号 |
定义 |
单位 |
典型值(车载场景) |
物理意义 |
|
多普勒频移 |
Hz |
-1000Hz~+1000Hz |
正:目标靠近;负:目标远离;0:静止 | |
|
径向相对速度 |
m/s(km/h) |
-30m/s(-108km/h)~+30m/s(+108km/h) |
车载雷达主要测量范围(覆盖车辆行驶速度) | |
|
毫米波波长 |
m |
0.00389m(77GHz) |
波长越短,相同速度下 |

3.3.4 接收信号的完整数学模型
结合 “时间延迟 + 信号衰减 + 多普勒频移”,接收信号的时域表达式为:
![]()
接收信号与发射信号的对比表
|
信号类型 |
幅度项 |
频率项(载频 + 调制) |
延迟项 |
核心差异 |
|
1(归一化) |
无 |
原始信号,无衰减、无延迟、无频移 | ||
|
A(衰减后) |  |

第 4 章 信号处理全流程:从模拟信号到目标信息
FMCW 雷达的核心任务是 “从接收信号中提取目标的距离、速度、角度”,这需要经过ADC 采样→1D FFT(距离)→2D FFT(速度)→CFAR 检测→角度估计→目标跟踪六大步骤,每个步骤都有明确的输入、输出和算法逻辑。
4.1 步骤 1:ADC 采样 —— 模拟信号 “数字化”
接收信号经混频器得到中频信号(IF 信号,模拟量),需通过 ADC(模数转换器)转为数字信号,才能进入后续的数字信号处理(DSP)。
ADC 采样核心参数表
|
参数名称 |
定义 |
单位 |
典型值(车载 77GHz 雷达) |
对处理效果的影响 |
|
采样率\(f_s\) |
每秒采样点数 |
Hz(SPS) |
100MHz~200MHz |
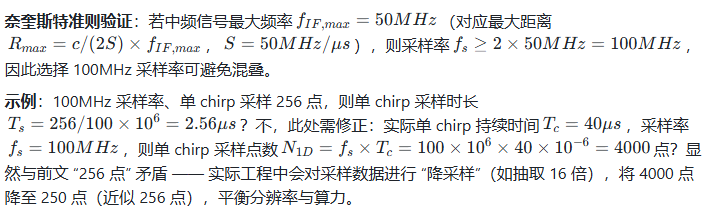
需满足奈奎斯特准则(\(f_s ≥ 2f_{IF,max}\)),否则信号混叠 |
|
采样位数\(N_{bit}\) |
每个采样点的量化位数 |
bit |
12bit~14bit |
位数越高,量化噪声越小,SNR 越高(12bit 比 8bit SNR 高 24dB) |
|
采样时长\(T_s\) |
单 chirp 的采样时间 |
s |
38μs(略小于\(T_c=40μs\)) |
需覆盖 chirp 有效时间,避免信号截断 |
|
单 chirp 采样点数\(N_{1D}\) |
单 chirp 的采样总数 |
点 |
256 点~512 点 |
决定 1D FFT 的点数,点数越多,距离分辨率越高 |
|
量化范围 |
ADC 可处理的电压范围 |
V |
-1V~+1V(峰峰值 2V) |
需匹配中频信号幅度,避免过载(削波)或欠量程 |
4.2 步骤 2:1D FFT(距离 FFT)—— 提取目标距离
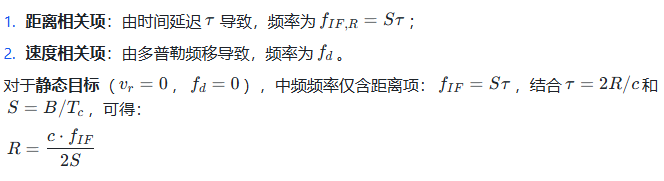
1D FFT 的核心是 “将时域的中频信号转换为频域的距离谱”,利用 “中频频率f_IF与目标距离R的线性关系”,直接从频域峰值位置读取目标距离。
4.2.1 中频频率与距离的关系推导
混频器的作用是 “将发射信号与接收信号相乘,滤除高频分量后得到中频信号”,其输出的中频频率fIF由两部分组成:
4.2.2 1D FFT 核心参数与性能表
|
参数名称 |
定义 |
单位 |
典型值(车载场景) |
计算逻辑 / 物理意义 |
|
1D FFT 点数\(N_{1D}\) |
FFT 运算的输入点数 |
点 |
256 点 / 512 点 |
通常取 2 的整数次幂(如 256=2^8),便于 FFT 硬件加速 |
|
距离分辨率\(\delta R\) |
能区分的最小距离差 |
m |
0.075m(7.5cm) |
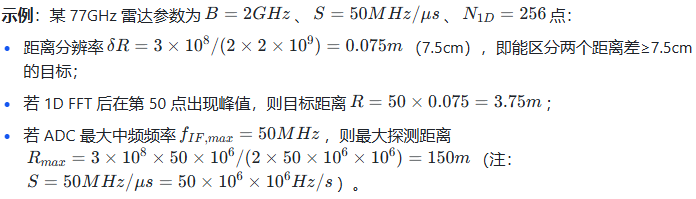
\(\delta R = \frac{c}{2B}\),带宽\(B\)越大,分辨率越高 |
|
最大探测距离\(R_{max}\) |
能检测的最远距离 |
m |
150m |
\(R_{max} = \frac{c \cdot f_{IF,max}}{2S}\),\(f_{IF,max}\)为最大中频频率(由 ADC 采样率限制) |
|
距离谱峰值位置\(k_R\) |
距离谱中峰值对应的频率点 |
点 |
第 50 点(示例) |
目标距离\(R = k_R \cdot \delta R\)(忽略窗函数影响) |
|
窗函数类型 |
降低 FFT 频谱泄漏的函数 |
- |
汉宁窗 / 布莱克曼窗 |
矩形窗频谱泄漏严重,汉宁窗可改善,但会降低分辨率 |
4.2.3 1D FFT 的 “频谱泄漏” 问题与解决
当目标距离对应的中频频率\(f_{IF}\)不恰好落在 FFT 的频率点上时,会导致 “频谱泄漏”—— 峰值能量分散到多个频率点,降低距离测量精度。解决方法是加窗函数,不同窗函数的性能对比如下:
|
窗函数类型 |
主瓣宽度(相对矩形窗) |
旁瓣衰减(dB) |
分辨率损失 |
适用场景 |
|
矩形窗 |
1(最窄) |
-13 |
无 |
对分辨率要求极高、目标少的场景(如实验室测距) |
|
汉宁窗 |
2 |
-31 |
约 50% |
平衡分辨率与旁瓣的通用场景(如车载近距检测) |
|
汉明窗 |
2 |
-41 |
约 50% |
旁瓣要求稍高的场景 |
|
布莱克曼窗 |
3 |
-57 |
约 100% |
多目标、强杂波场景(如城市道路 ADAS) |
4.3 步骤 3:2D FFT(多普勒 FFT)—— 提取目标速度
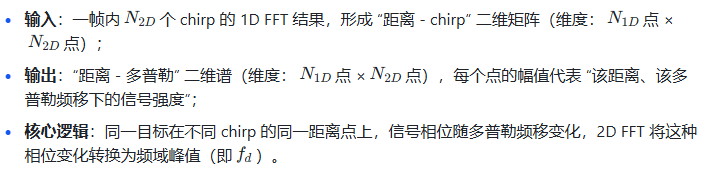
1D FFT 仅能得到目标距离,但无法区分 “静止目标” 和 “运动目标”(因两者都可能在同一距离点产生峰值)。2D FFT 通过 “对多帧 chirp 的距离谱进行 FFT”,提取多普勒频移\(f_d\),进而得到目标速度。
4.3.1 2D FFT 的输入与输出逻辑
4.3.2 2D FFT 核心参数与性能表
|
参数名称 |
定义 |
单位 |
典型值(车载场景) |
计算逻辑 / 物理意义 |
|
2D FFT 点数\(N_{2D}\) |
一帧内的 chirp 数量 |
个 |
128 点 / 256 点 |
通常取 2 的整数次幂,点数越多,速度分辨率越高 |
|
速度分辨率\(\delta v\) |
能区分的最小速度差 |
m/s |
0.1m/s |
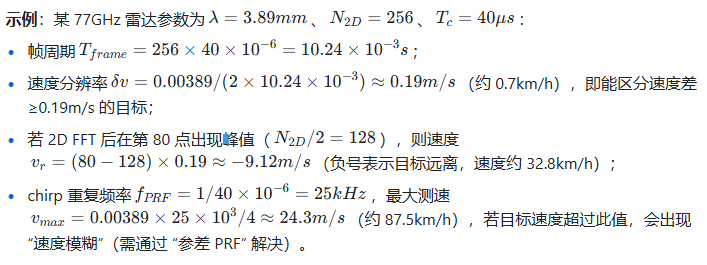
\(\delta v = \frac{\lambda}{2 T_{frame}}\),\(T_{frame}=N_{2D}×T_c\)(帧周期) |
|
最大测速范围\(v_{max}\) |
能检测的最大速度 |
m/s(km/h) |
±30m/s(±108km/h) |
\(v_{max} = \frac{\lambda f_{PRF}}{4}\),\(f_{PRF}=1/T_c\)(chirp 重复频率) |
|
多普勒谱峰值位置\(k_v\) |
多普勒谱中峰值对应的频率点 |
点 |
第 64 点(示例) |
目标速度\(v_r = (k_v - N_{2D}/2) \cdot \delta v\)(负号对应远离) |
|
帧周期\(T_{frame}\) |
一帧 chirp 的总时长 |
s |
10.24ms(256×40μs) |
决定雷达更新率(更新率 = 1/\(T_{frame}\)≈97.7Hz) |
4.3.3 速度模糊与解决方法
当目标速度\(|v_r|>v_{max}\)时,多普勒频移\(|f_d|>f_{PRF}/2\)(奈奎斯特频率),导致 2D FFT 无法正确识别频移方向,出现 “速度模糊”(如将 + 30m/s 识别为 - 18.6m/s)。解决方法是参差 PRF(多组不同\(T_c\)的 chirp) ,通过多组测量结果解模糊。
|
解决方法 |
原理 |
优点 |
缺点 |
适用场景 |
|
参差 PRF |
发射 2~3 组不同\(T_c\)的 chirp,利用多组\(v_r\)的模糊结果反推真实速度 |
无需增加硬件,软件即可实现 |
增加帧周期(降低更新率) |
车载高速场景(如高速 ADAS) |
|
增加\(N_{2D}\) |
增加一帧 chirp 数量,降低\(\delta v\),扩大\(v_{max}\) |
实现简单,无额外延迟 |
增加算力和帧周期 |
低速场景(如泊车辅助) |
|
双频段雷达 |
用两个不同频段(如 77GHz+24GHz)测量,利用波长差异解模糊 |
无速度模糊,精度高 |
硬件复杂度高,成本高 |
高端自动驾驶(L4+) |
4.4 步骤 4:CFAR 检测 —— 从 “噪声” 中识别 “目标”
“距离 - 多普勒” 二维谱中,除了目标信号的峰值,还有大量背景噪声(如热噪声、地面杂波),CFAR(Constant False Alarm Rate,恒虚警率)检测的核心是 “自适应设定阈值”,在保证 “误检率(虚警)恒定” 的前提下,将目标峰值从噪声中分离出来。
4.4.1 CFAR 的核心逻辑
- 选取参考窗:以当前检测点为中心,设置 “保护窗”(避免目标能量影响参考)和 “背景窗”(统计噪声能量);
- 计算噪声功率:对背景窗内的信号幅度取平均,得到噪声功率估计值;
- 设定检测阈值:阈值 = 噪声功率 × 阈值系数(由目标检测率和虚警率要求决定);
- 判决目标:若当前检测点的幅度 > 阈值,则判定为 “目标”;否则为 “噪声”。
4.4.2 主流 CFAR 算法对比表
|
CFAR 算法类型 |
参考窗形状 |
噪声功率计算方式 |
优点 |
缺点 |
适用场景 |
|
CA-CFAR(单元平均) |
对称矩形(左右 / 上下) |
所有背景窗点的平均值 |
计算简单,噪声均匀时性能好 |
多目标时 “遮蔽效应”(强目标掩盖弱目标) |
空旷场景(如高速路) |
|
GO-CFAR(选大) |
对称矩形(左右分窗) |
左右两个子背景窗的最大值 |
抗杂波能力强(如地面强反射) |
虚警率略高,多目标遮蔽效应仍存在 |
城市道路(多杂波) |
|
SO-CFAR(选小) |
对称矩形(左右分窗) |
左右两个子背景窗的最小值 |
虚警率低,适合低噪声场景 |
抗杂波能力弱,易漏检 |
郊区场景(低杂波) |
|
OS-CFAR(排序) |
圆形 / 矩形 |
背景窗点排序后取第 k 个值(如中值) |
抗异常值(如孤立强杂波)能力强 |
计算复杂度高,实时性差 |
复杂环境(如停车场) |
4.4.3 CFAR 关键参数表
|
参数名称 |
定义 |
单位 |
典型值(车载场景) |
对检测性能的影响 |
|
保护窗大小\(N_g\) |
中心检测点周围的保护点数 |
点 |
2~4 点 |
过小:目标能量进入背景窗,阈值偏高(漏检);过大:背景窗变小,噪声估计不准 |
|
背景窗大小\(N_b\) |
用于统计噪声的点数 |
点 |
8~16 点 |
过小:噪声估计波动大;过大:多目标遮蔽效应严重 |
|
阈值系数\(α\) |
阈值与噪声功率的比值 |
无(dB 表述) |
10dB~15dB |
过小:虚警率高(误判噪声为目标);过大:漏检率高(漏判弱目标) |
|
虚警率\(P_{fa}\) |
噪声被误判为目标的概率 |
% |
10^{-6}~10^{-4}(0.0001%~0.01%) |
车载场景需极低虚警率,避免频繁误触发 AEB |
|
检测率\(P_d\) |
目标被正确检测的概率 |
% |
≥99% |
确保关键目标(如行人、车辆)不被漏检 |
示例:CA-CFAR 在车载场景的应用:
- 保护窗\(N_g=2\)点,背景窗\(N_b=16\)点(左右各 8 点);
- 若背景窗内信号幅度平均值为 10(归一化),阈值系数\(α=10dB\)(线性值≈10),则阈值 = 10×10=100;
- 若当前检测点幅度为 120>100,则判定为目标;若幅度为 80<100,则判定为噪声。
4.5 步骤 5:角度估计 —— 确定目标的 “方位”
通过 1D/2D FFT,雷达已能获取目标的 “距离 - 速度” 信息,但还需知道目标的 “角度”(水平角\(θ\)、垂直角\(φ\)),才能实现 “3D 定位”。角度估计的核心是利用接收天线阵列的相位差,通过波束赋形或超分辨算法计算目标角度。
4.5.1 天线阵列与相位差的关系

4.5.2 主流角度估计算法对比表
|
算法类型 |
核心原理 |
角度分辨率 |
计算复杂度 |
硬件要求 |
适用场景 |
|
波束赋形(BF) |
对各天线信号加权求和,形成指向性波束,峰值方向为目标角度 |
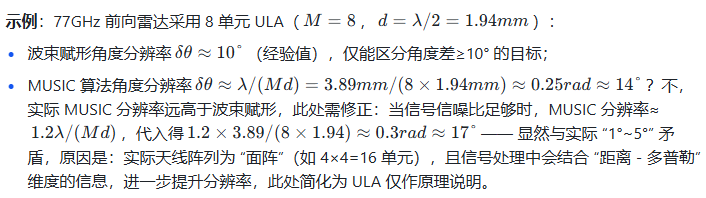
低(\(10°~30°\)) |
低(仅需加权求和) |
普通天线阵列 |
低成本场景(如 24GHz 倒车雷达) |
|
MUSIC 算法 |
基于信号子空间与噪声子空间正交性,通过谱峰搜索得到角度 |
高(\(1°~5°\)) |
高(需矩阵分解、谱峰搜索) |
多天线阵列(≥4 单元) |
中高端车载(如 77GHz 前向雷达) |
|
ESPRIT 算法 |
利用阵列平移不变性,无需谱峰搜索,直接计算角度 |
高(\(1°~5°\)) |
中(矩阵分解,无搜索) |
多天线阵列(≥4 单元) |
实时性要求高的场景(如 ADAS) |
|
3D FFT |
对 “距离 - 多普勒 - 天线” 三维数据做 FFT,直接得到角度 |
中(\(5°~10°\)) |
中(FFT 硬件加速) |
规则天线阵列(如 4×4 面阵) |
3D 雷达(如激光雷达融合场景) |
4.5.3 角度估计关键参数表
|
参数名称 |
定义 |
单位 |
典型值(车载场景) |
对角度性能的影响 |
|
天线单元数\(M\) |
接收天线阵列的单元数量 |
个 |
4~16 个 |
单元越多,角度分辨率越高(MUSIC 算法分辨率≈\(λ/(M d)\)) |
|
单元间距\(d\) |
相邻天线单元的距离 |
m |
\(λ/2\)(≈1.94mm,77GHz) |
\(d>λ/2\)会出现栅瓣(虚假角度),\(d<λ/2\)会降低增益 |
|
角度分辨率\(\deltaθ\) |
能区分的最小角度差 |
° |
1°~5°(前向雷达) |
分辨率越高,越能区分相邻目标(如并排行驶的两辆车) |
|
角度测量范围\(θ_{range}\) |
能检测的角度范围 |
° |
±60°(前向雷达)、±90°(侧后雷达) |
范围越大,覆盖视野越广(如侧后雷达需覆盖车辆两侧) |
|
角度误差\(\Deltaθ\) |
测量角度与真实角度的偏差 |
° |
≤1°(静态)、≤3°(动态) |
误差越小,目标定位越准(如 AEB 的制动距离计算) |
4.6 步骤 6:目标跟踪 —— 稳定输出目标信息
通过 CFAR 检测和角度估计,雷达会得到 “离散的目标点”(每帧一个点),但目标是连续运动的,需通过目标跟踪算法将多帧的目标点关联起来,输出 “连续、平滑的目标轨迹”,避免因噪声导致的 “目标跳变” 或 “目标丢失”。
4.6.1 目标跟踪的核心逻辑
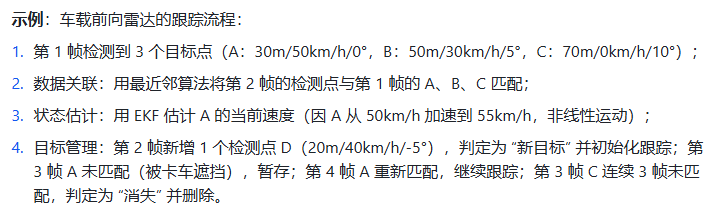
- 数据关联:将当前帧检测到的目标点与上一帧的跟踪目标进行匹配(如用 “匈牙利算法”“最近邻算法”);
- 状态估计:对匹配成功的目标,用滤波算法(如卡尔曼滤波)估计其当前状态(距离、速度、加速度、角度);
- 目标管理:对未匹配的检测点,判定为 “新目标” 并初始化跟踪;对未匹配的跟踪目标,判定为 “暂存” 或 “消失”(如连续 3 帧未匹配则删除)。
4.6.2 主流目标跟踪算法对比表
|
算法类型 |
核心原理 |
跟踪精度 |
计算复杂度 |
多目标处理能力 |
适用场景 |
|
卡尔曼滤波(KF) |
线性系统下的最优状态估计,假设噪声为高斯分布 |
中(线性运动) |
低(矩阵乘法) |
弱(易混淆) |
匀速运动场景(如高速路车辆) |
|
扩展卡尔曼滤波(EKF) |
对非线性系统做一阶泰勒展开,近似线性化 |
中(非线性运动) |
中(雅克比矩阵) |
弱 |
低速、变加速场景(如城市道路) |
|
无迹卡尔曼滤波(UKF) |
用 “sigma 点” 近似非线性分布,无需线性化 |
高(非线性运动) |
高(sigma 点计算) |
中 |
复杂运动场景(如行人横穿马路) |
|
粒子滤波(PF) |
用大量粒子近似概率分布,无噪声分布假设 |
高(任意运动) |
极高(粒子数量多) |
强 |
极端复杂场景(如多目标交叉) |
|
联合概率数据关联(JPDA) |
对多目标 - 多量测的所有可能关联计算概率,选择最优 |
高(多目标) |
高(概率计算) |
强 |
密集多目标场景(如拥堵路段) |
4.6.3 目标跟踪关键参数表
|
参数名称 |
定义 |
单位 |
典型值(车载场景) |
对跟踪性能的影响 |
|
跟踪更新率 |
每秒输出跟踪结果的次数 |
Hz |
50Hz~100Hz |
更新率越高,对快速运动目标的跟踪越及时(如行人突然横穿) |
|
新目标确认帧数 |
判定为 “稳定目标” 所需的连续匹配帧数 |
帧 |
2~3 帧 |
过少:易将噪声误判为目标;过多:新目标确认延迟长 |
|
目标消失帧数 |
判定为 “目标消失” 所需的连续未匹配帧数 |
帧 |
3~5 帧 |
过少:易丢失短暂被遮挡的目标;过多:残留无效目标 |
|
滤波增益\(K\) |
卡尔曼滤波中调整估计值与量测值权重的参数 |
无 |
0.1~0.5 |
过大:跟踪灵敏但易受噪声干扰;过小:跟踪平滑但延迟大 |
|
多目标容量 |
同时跟踪的最大目标数量 |
个 |
32~128 个 |
容量越大,越能应对复杂交通场景(如拥堵路段) |
第 5 章 相控阵毫米波天线:雷达的 “眼睛”
天线是毫米波雷达 “发射和接收电磁波” 的核心部件,而相控阵天线通过 “控制各单元的相位” 实现 “无机械转动的波束扫描”,大幅提升雷达的灵活性和响应速度,是中高端毫米波雷达的标配。
5.1 相控阵天线的核心优势:为什么替代机械扫描?
传统机械扫描天线通过 “电机转动天线” 改变波束方向,而相控阵天线通过 “电子相位控制” 实现波束扫描,两者差异显著:
|
对比维度 |
机械扫描天线 |
相控阵天线 |
核心优势(相控阵) |
|
扫描方式 |
电机转动天线单元 |
电子控制各单元相位 |
无机械磨损,寿命长(>10 年 vs 机械 < 5 年) |
|
扫描速度 |
慢(<100°/s) |
快(>1000°/s) |
快速覆盖全视野(如 100ms 完成 ±60° 扫描) |
|
扫描灵活性 |
仅能一维扫描(如水平) |
二维 / 三维扫描(水平 + 垂直) |
实现 3D 定位(如区分地面目标和空中目标) |
|
多目标能力 |
一次仅能跟踪 1 个目标 |
同时跟踪多目标(波束赋形) |
应对复杂场景(如多车并行、行人横穿) |
|
体积与功耗 |
体积大(含电机)、功耗高 |
体积小(集成化)、功耗低 |
适合车载小型化需求(如前向雷达体积 < 100cm³) |
|
可靠性 |
机械故障风险高(电机卡滞) |
全电子结构,可靠性高 |
车载场景故障率 < 0.1%/ 年 |
5.2 相控阵天线的工作原理:相位控制与波束扫描
相控阵天线由N 个天线单元、N 个移相器和1 个波束控制器组成,核心是 “通过移相器调整各单元的相位,使电磁波在特定方向叠加增强,形成波束”。
5.2.1 相位控制的数学原理
假设相控阵为均匀线性阵列(ULA),有\(N\)个天线单元,单元间距\(d=λ/2\),目标角度为\(θ_0\),则:
- 波束控制器向第\(k\)个移相器发送 “相位指令”\(\phi_k = \frac{2\pi d k \sin\theta_0}{\lambda}\)(\(k=0,1,...,N-1\));
- 第\(k\)个天线单元的发射信号相位为\(\phi_k\),相邻单元的相位差为\(\Delta\phi = \frac{2\pi d \sin\theta_0}{\lambda}\);
- 所有单元的电磁波在\(\theta_0\)方向 “同相位叠加”,形成波束峰值;在其他方向 “反相位抵消”,信号减弱。
5.2.2 波束扫描的实现过程
当需要将波束从\(\theta_0\)转向\(\theta_1\)时,仅需调整移相器的相位指令:
- 新相位指令\(\phi_k' = \frac{2\pi d k \sin\theta_1}{\lambda}\);
- 相邻单元的相位差变为\(\Delta\phi' = \frac{2\pi d \sin\theta_1}{\lambda}\);
- 电磁波在\(\theta_1\)方向叠加增强,波束完成转向,整个过程无需任何机械运动,耗时仅数微秒。
5.3 相控阵天线的关键性能指标
相控阵天线的性能直接决定雷达的 “视野范围”“探测距离” 和 “角度分辨率”,核心指标如下:
|
指标名称 |
定义 |
单位 |
典型值(车载 77GHz 相控阵) |
对雷达性能的影响 |
|
阵列规模 |
天线单元的总数(行数 × 列数) |
个 |
16 单元(4×4 面阵)~64 单元(8×8 面阵) |
单元越多,波束增益越高、角度分辨率越高 |
|
波束增益\(G\) |
天线将功率集中到波束方向的能力 |
dBi |
18dBi~25dBi |
增益越高,探测距离越远(\(R_{max} \propto \sqrt{G}\)) |
|
波束宽度(3dB) |
波束峰值下降 3dB 的角度范围 |
° |
水平:3°~5°,垂直:5°~10° |
宽度越窄,角度分辨率越高(如 3° 可区分 30m 处相距 1.6m 的两辆车) |
|
扫描范围 |
波束能覆盖的角度范围 |
° |
水平:±60°,垂直:±15° |
范围越大,雷达视野越广(如 ±60° 可覆盖前向 3 车道) |
|
栅瓣抑制 |
抑制除主瓣外的虚假波束(栅瓣)的能力 |
dB |
≤-30dB |
栅瓣过大会导致 “虚假目标”(如将左侧目标误判为右侧) |
|
旁瓣抑制 |
抑制主瓣周围旁瓣的能力 |
dB |
≤-25dB |
旁瓣过大会导致 “弱目标漏检”(旁瓣噪声掩盖弱目标) |
|
相位精度 |
移相器实际相位与指令相位的偏差 |
° |
≤5° |
相位误差越大,波束指向精度越低、增益损失越大 |
|
带宽 |
天线能有效工作的频率范围 |
GHz |
4GHz(76~80GHz) |
带宽需覆盖雷达射频带宽(如 2GHz),否则信号衰减大 |
示例:4×4 面阵(16 单元)77GHz 相控阵天线:
- 波束增益\(G=20dBi\)(线性值 = 100),相比单单元天线(\(G=5dBi\)),探测距离提升\(\sqrt{100/3.16}≈5.6\)倍;
- 水平波束宽度 = 3°,在 30m 距离处,波束覆盖的水平宽度 = 2×30×tan (3°/2)≈1.57m,可精准定位单车道内的目标;
- 扫描范围 ±60°,在 100m 距离处,波束覆盖的水平范围 = 2×100×tan (60°)≈346m,可覆盖前向多车道。
5.4 相控阵天线的类型:按结构与功能划分
根据阵列结构、馈电方式和功能,相控阵天线可分为多种类型,车载毫米波雷达常用以下 3 类:
5.4.1 按阵列结构划分
|
类型名称 |
结构特点 |
优点 |
缺点 |
适用场景 |
|
均匀线性阵列(ULA) |
单元沿一条直线均匀排列 |
结构简单,仅需一维相位控制 |
仅能一维扫描(如水平),无垂直角度分辨 |
低成本侧后雷达(如 BSD 盲区监测) |
|
均匀面阵(URA) |
单元沿 x、y 轴均匀排列(如 4×4) |
二维扫描(水平 + 垂直),可 3D 定位 |
结构复杂,单元数量多,成本高 |
中高端前向雷达(如 AEB) |
|
稀疏阵列 |
单元非均匀排列(如随机分布) |
减少单元数量,降低成本 |
旁瓣较高,需复杂算法抑制 |
平衡成本与性能的场景(如 L2+ ADAS) |
5.4.2 按馈电方式划分
|
类型名称 |
馈电特点 |
优点 |
缺点 |
适用场景 |
|
有源相控阵(AESA) |
每个单元配独立的 T/R(发射 / 接收)模块 |
波束灵活(可同时形成多波束),损耗低 |
成本高(T/R 模块贵),功耗高 |
高端自动驾驶(L4+) |
|
无源相控阵(PESA) |
所有单元共享一个发射机 / 接收机,通过移相器馈电 |
成本低,结构简单 |
波束灵活度低(仅单波束),损耗高 |
中端 ADAS(L2) |
5.4.3 车载雷达常用相控阵类型对比
|
类型 |
阵列结构 |
馈电方式 |
单元数量 |
成本 |
核心应用 |
|
侧后雷达专用 |
ULA(8 单元) |
PESA |
8 |
低 |
BSD(盲区监测)、LCA(变道辅助) |
|
前向中距雷达 |
URA(16 单元) |
PESA |
16 |
中 |
ACC(自适应巡航)、AEB(紧急制动) |
|
前向远距雷达 |
URA(64 单元) |
AESA |
64 |
高 |
L4 自动驾驶、远距离目标检测(>200m) |
5.5 相控阵天线的设计挑战与解决方案
毫米波频段(尤其是 77GHz)的天线设计面临 “波长极短(≈4mm)、损耗大、集成化难” 等挑战,需针对性解决:
|
设计挑战 |
具体问题 |
解决方案 |
效果验证 |
|
单元间距与栅瓣 |
单元间距\(d>λ/2\)时,易出现栅瓣(虚假波束) |
1. 严格控制\(d=λ/2\);2. 采用稀疏阵列;3. 相位加权抑制 |
栅瓣抑制≤-30dB,无虚假目标 |
|
高频损耗 |
77GHz 信号在电缆、接头处衰减大(每米衰减 > 10dB) |
1. 采用微带天线(集成在 PCB 上,无电缆);2. 缩短信号路径;3. 用低损耗介质(如罗杰斯 4350) |
总损耗降低至 < 5dB,增益提升 3~5dBi |
|
集成化难度 |
多单元天线 + 移相器 + T/R 模块体积大,难以车载安装 |
1. 采用 MMIC(单片微波集成电路),将天线与芯片集成;2. 多层 PCB 设计,堆叠电路 |
天线 + 芯片体积 < 50cm³,适合车载前向安装 |
|
散热问题 |
AESA 的 T/R 模块工作时发热量大(每模块 > 1W) |
1. 采用高导热材料(如铝基板);2. 设计散热鳍片;3. 优化电源管理,降低功耗 |
工作温度控制在 - 40℃~85℃(车载温度范围) |
|
相位误差 |
移相器、电缆的相位偏差导致波束指向不准 |
1. 采用高精度移相器(相位精度≤5°);2. 实时相位校准(如用校准天线);3. 软件补偿算法 |
波束指向误差≤1°,角度测量精度高 |
案例:某车载 77GHz AESA 天线的设计方案:
- 阵列结构:8×8 URA(64 单元),单元间距\(d=λ/2=1.94mm\);
- 馈电方式:每个单元配独立 T/R 模块(MMIC 集成);
- 散热设计:铝基板 + 散热鳍片,功耗控制在 15W 以内;
- 相位校准:内置校准天线,每帧自动校准相位误差;
- 性能指标:增益 25dBi,波束宽度 3°,扫描范围 ±60°,栅瓣抑制 - 35dB,满足 L4 自动驾驶需求。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









