



无人机使能的NOMA网络中基于选择性增量中继与不完美信道状态信息的性能分析
摘要
本文研究了采用选择性增量中继和不完美信道状态信息(CSI)的无人机(UAV)赋能非正交多址接入(NOMA)网络的性能。具体而言,一个接入点基于NOMA原理向无人机终端(UT)发送叠加信号,该UT可作为中继协助向地面终端(GT)进行信息传输。不同于传统中继协议要求UT无论两个终端接收信号质量如何都必须始终中继消息,本文提出了一种新型基于NOMA的选择性增量中继协议,该协议仅在UT接收到满足质量要求的信号且GT信号质量不满足时,才允许中继转发消息。本文推导了两个终端中断概率的闭式解,并结合基于仰角的路径损耗指数和小尺度衰落进行了表征。此外,还提供了基准方案以展示所提协议的优越性。最后,仿真与理论结果验证了中断分析的正确性,证明了所提中继协议相较于其他方案的优势,并表明信道估计误差对GT的中断概率影响比对UT更强。
索引词 —不完美信道状态信息,不完美连续干扰消除,非正交多址接入,中继协议,无人机。
一、引言
作为一种有前景的范式转变,无人机(UAV)赋能的网络由于具有高移动性、灵活操作和低成本等优势特性,正在迅速发展成为下一代无线网络的关键技术[1]和[2]。在现有的蜂窝网络中,无人机可作为飞行基站或中继,以提升蜂窝网络的覆盖范围和连接性能,尤其是在地面基站因灾害受损的情况下[3]。另一方面,无人机被视为一种需要接入蜂窝网络以接收服务的新型空中终端。
然而,移动设备的指数增长以及无人机通信可用频谱带的限制导致了无人机网络性能下降[4]。与正交多址接入(OMA)相比,非正交多址接入(NOMA)可被视为一种有前景的空中接口技术,能够提高频谱效率(SE)、支持海量连接并降低传输时延[5]。NOMA的核心思想是在发射机处将多个用户的信号在相同的时域/频域/码域内以不同的功率级别叠加,并在接收机处利用连续干扰消除(SIC)来区分不同用户的独立信号[6]。此外,NOMA网络可受益于无人机的应用,因为无人机能够生成用户间信道条件的差异。因此,研究无人机赋能的NOMA网络具有重要意义。
迄今为止,已有一些关于无人机使能的NOMA网络的研究。在[7]中,作者提出了一种基于无人机高度的框架,以通过最大化可靠性和覆盖范围来分析中断性能并获得最优无人机高度。[8]中的作者提出了一种空地NOMA方案,并研究了在完美和部分信道状态下地面用户的最大数据速率。在[9]中,针对无人机作为中继将数据从基站转发给一组用户的场景,最小化了无人机使能的NOMA网络中的总功耗。在[10]中,作者分析了基于NOMA的中继方案下使用无限或有限码块长度时用户的吞吐量,并通过在满足地面用户速率约束条件下最大化无人机的速率,提供了最优资源分配。在下行链路NOMA网络中部署多个无人机的情况下,[11]研究了一种连续中继方案,其中一个无人机被选中为两个用户发送叠加信号。在[12]中提出了一种无人机使能的移动中继系统,并针对应急场景研究了中断概率最小化问题。作者在[13]和[14]中将NOMA引入无人机使能的中继网络,并在每个用户速率的约束下最大化和速率。在[15]中提出了一种频谱高效的无人机使能协作NOMA方案用于上行传输,并研究了总功率最小化问题。
上述所有现有研究均假设,在无人机使能的NOMA网络中,中继节点始终采用固定中继协议,即无论用户接收信号质量如何,中继都会持续转发信号。然而,当用户的QoS已得到满足时,固定中继协议会消耗无人机有限的能量,造成不必要的功耗。此外,目前大多数研究都基于理想的信道状态信息,并假设收发器能够完美实现SIC过程,这与实际场景[16]不符。
基于上述现有研究,本文的主要贡献总结如下。首先,提出了一种无人机使能的NOMA网络中的新型选择性增量中继协议,其中当用户终端接收到的信号质量满足条件且地面终端接收到的信号质量不满足条件时,将用户终端作为中继。其次,考虑基于仰角的路径损耗指数和小尺度衰落,针对选择性增量中继协议(SIRP)推导了用户终端和地面终端中断概率的闭式解。第三,从理论和仿真方面分别证明了SIRP相较于其他方案在无人机使能的NOMA网络中的优越性,并表明信道估计误差对地面终端的中断概率影响比对用户终端更显著。
二、系统模型
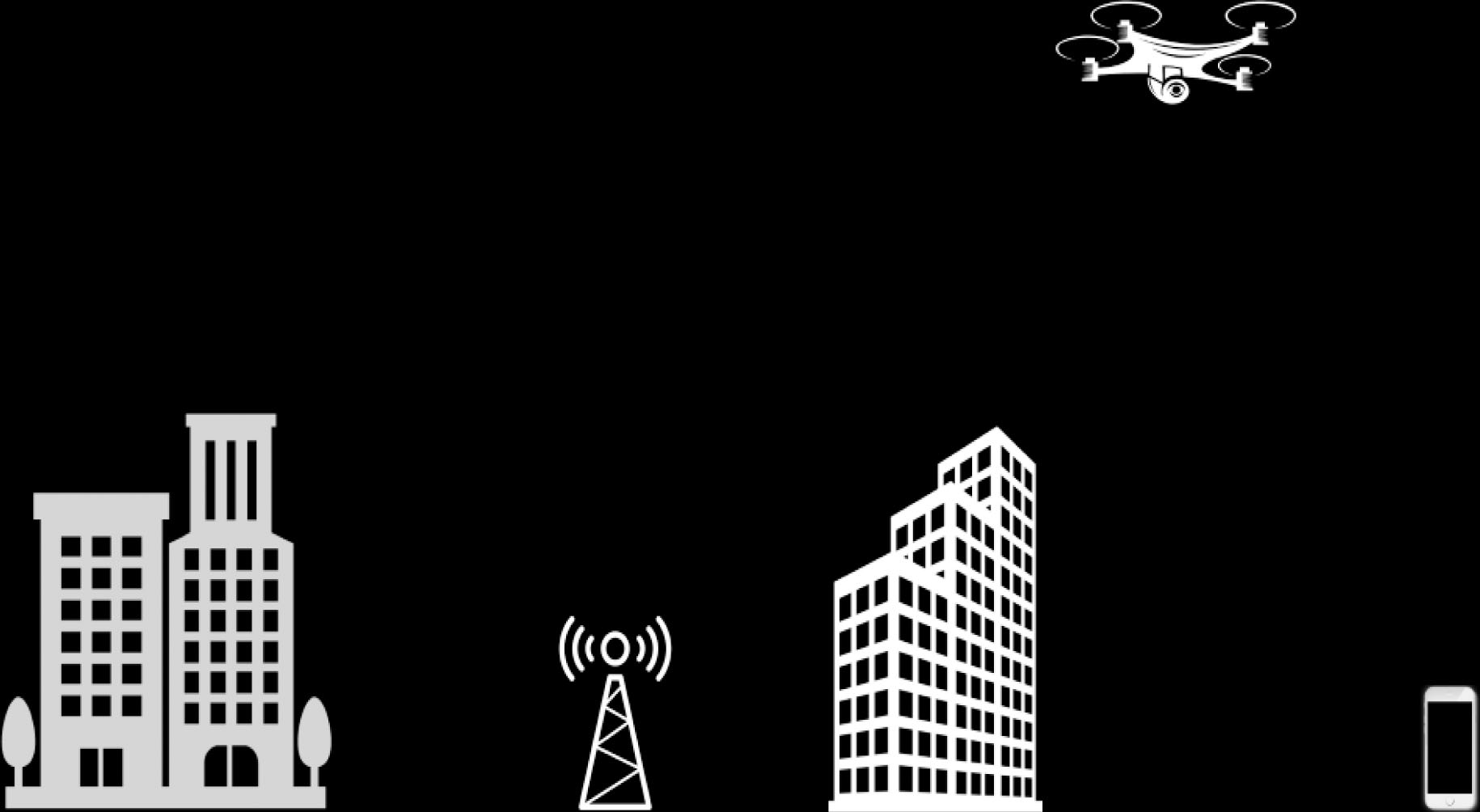
图1展示了由一个接入点(AP)、一个地面终端(GT)和一个无人机终端(UT)组成的NOMA网络的下行链路,其中UT在整个通信过程中保持准静止状态悬停。根据NOMA原理,AP使用相同的时频资源为GT和UT提供服务。为了提升GT的性能,当需要时,UT可作为飞行中继协助向GT的信息传输。UT采用译码转发中继协议。此外,网络中的所有相关节点均仅配备单一天线,并工作在半双工(HD)模式下。
所有无线信道均经历大尺度衰落和小尺度衰落。前者主要取决于通信节点之间的距离,后者由多径信号的统计结果决定。此外,假设无线信道经历平坦块衰落,即每个块内无线信道的小尺度衰落保持不变。设 $h_{au}$、$h_{ag}$ 和 $h_{ug}$ 分别表示接入点到用户终端(AP → UT)、接入点到地面终端(AP → GT)以及用户终端到地面终端(UT → GT)的无线信道系数,其中A → B表示从节点A到节点B的链路。
我们假设接入点、地面终端和用户终端的位置在三维坐标系中分别表示为$(0,0,0)$、$(x_g , y_g , 0)$和$(x_u , y_u , z_u)$。接入点到用户终端、接入点到地面终端以及用户终端到地面终端的距离分别由以下公式给出
$$
d_{ag} = \sqrt{x_g^2 + y_g^2},
$$
$$
d_{au} = \sqrt{x_u^2 + y_u^2 + z_u^2},
$$
$$
d_{ug} = \sqrt{(x_u - x_g)^2 + (y_u - y_g)^2 + z_u^2},
$$
分别地。
由于用户终端(UT)处于高海拔,接入点(AP)→ UT 和 UT → GT 可能以较大概率存在视距(LoS)链路。换句话说,用户终端(UT)和地面终端(GT)可能接收到包含视距(LoS)和非视距(NLoS)分量的复合信号。信道系数可建模为概率性视距信道模型[17]。视距概率可由下式给出
$$
P_{\text{LoS}}(\theta_i) = \frac{1}{1 + a \cdot e^{-b(\theta_i - a)}} \quad (i= au, ag, ug),
$$
其中 $a$ 和 $b$ 是依赖于环境的常数参数。此外,$\theta_{au} = \arctan\left(\frac{z_u}{\sqrt{x_u^2 + y_u^2}}\right)$ 和 $\theta_{ug} = \arctan\left(\frac{z_u}{\sqrt{(x_u - x_g)^2 + (y_u - y_g)^2}}\right)$ 分别为接入点到用户终端的仰角和用户终端到地面终端的俯角。对应的非视距概率由 $P_{\text{NLoS}}(\theta_i) = 1 - P_{\text{LoS}}(\theta_i)$ 给出。$h_{au}$、$h_{ag}$ 和 $h_{ug}$ 的信道功率增益建模为
$$
|h_i|^2 = C \Omega_i d_i^{-\alpha_i} \quad (i= au, ag, ug),
$$
其中 $C = G_t G_r \left(\frac{4\pi f_c}{c}\right)^{-2}$ 为常数,$G_t$ 和 $G_r$ 为收发天线增益,$f_c$ 为载波频率,$c$ 表示光速。此外,由视距/非视距概率决定的路径损耗指数为[8]
$$
\alpha_i = \xi_1 P_{\text{NLoS}}(\theta_i) + \xi_0 \quad (i= au, ag, ug),
$$
其中 $\xi_1$ 和 $\xi_0$ 是基本路径损耗系数,可视为常数。我们假设小尺度衰落的幅度增益 $\sqrt{\Omega_i}$ 服从莱斯分布。相应的功率增益 $\Omega_i$ 是非中心卡方随机变量(RVs),其概率密度函数(PDFs)为
$$
f_{\Omega_i}(x) = \frac{1}{2\upsilon^2} e^{-\frac{x + A^2}{2\upsilon^2}} I_0\left(\frac{\sqrt{A^2 x}}{\upsilon^2}\right),
$$
其中莱斯因子可定义为 $K_i \triangleq \frac{A^2}{2\upsilon^2}$,$A$ 是视距分量的幅度,而 $\upsilon$ 是非视距分量的标准差。这里,$I_0(x) = \sum_{n=0}^\infty \left(\frac{x/2}{n! \Gamma(n+1)}\right)^{2n}$ 是第一类零阶修正贝塞尔函数,其中 $\Gamma(x) = \int_0^\infty t^{x-1} e^{-t} dt$ 是伽马函数。
另一方面,莱斯因子可被视为仰角的函数
$$
K_i = K_0 e^{\frac{2}{\pi} \ln\left(\frac{K_{\text{max}}}{K_0}\right)\theta_i},
$$
其中 $K_0$ 和 $K_{\text{max}}$ 分别为对应于 $\theta_i = 0$ 和 $\theta_i = \frac{\pi}{2}$ 的最小和最大莱斯因子。
一般来说,网络通过利用完美信道状态信息可以实现其最优性能。然而,由于以下原因,该完美信道状态信息条件并不总是成立。一方面,在获取信道状态信息的过程中需要进行导频训练、信道估计和信号反馈,这不可避免地会带来一些误差和开销,尤其是在拥有大量用户的无线网络中。另一方面,在快衰落和时变环境中(例如无人机场景),很难获得完美信道状态信息。因此,实际中应考虑不完美信道状态信息条件。公式(5)中的信道模型可重写为[18]
$$
h_i = \hat{h}_i + e_i,
$$
其中,$\hat{h}_i$ 是 $h_i$ 的最小均方误差(MMSE)信道估计,其方差为 $D_i$,$e_i$ 为信道估计误差,通常可视为方差为 $\sigma_i^2$ 的高斯随机变量。此外,由于 $\hat{h}_i$ 与 $e_i$ 相互独立,$\hat{D}_i = D_i - \sigma_i^2$ 是 $\hat{h}_i$ 的方差,其中 $D_i$ 是 $h_i$ 的方差。
III. 基于SIRP的传输协议
传统固定中继协议(FRP)始终要求用户终端(UT)向地面终端(GT)转发消息,而不论两个终端的信号质量如何。对于FRP而言,如果地面终端(GT)处接收的用于解码 $s_g$ 的信号干扰噪声比(SINR)已超过目标SINR,但用户终端(UT)仍然继续转发消息,则可能因无人机的有限有效载荷而浪费功率资源,并降低无人机(UAV)使能网络的频谱效率(SE)。增量中继协议(IRP)通过在用户终端处极少重传,利用非常有限的反馈来提高频谱效率。对于IRP,中继决策仅取决于地面终端的接收信干噪比。然而,可能存在用户终端无法以满意的信干噪比解码地面终端信号的情况。
针对此情况,我们在用户终端提出了一种新颖的SIRP,其中中继决策基于地面终端和用户终端两者的接收信干噪比作出。
由于用户终端的半双工操作模式,整个通信过程可以分为两个阶段。
1) 第一阶段传输
在第一阶段,接入点根据非正交多址接入原理发送其叠加信息,包括用户终端信号 $s_u$ 和地面终端信号 $s_g$
$$
s = \sqrt{P_a \rho} s_u + \sqrt{P_a (1 - \rho)} s_g,
$$
其中 $P_a$ 是接入点的发射功率,$\rho$ 和 $1 - \rho$ 分别是用户终端和地面终端的功率控制系数。用户终端和地面终端接收到的消息可以表示为
$$
y_u = \hat{h}
{au} s + e
{au} s + n_u,
$$
$$
y_g = \hat{h}
{ag} s + e
{ag} s + n_g,
$$
其中,$n_j (j = u, g)$ 是方差为 $\sigma^2$ 的加性高斯白噪声(AWGN)。
在从接入点接收到信号后,用户终端采用连续干扰消除技术来解码信号。具体而言,用户终端首先从接收信号中解码 $s_g$,然后将其去除,以在无 $s_g$ 干扰的情况下解码自身的信号 $s_u$。此外,由于硬件限制、不准确的信道估计以及误差传播,地面终端处会出现不完美串行干扰消除(iSIC),这种情况在低成本接收器和大规模接入中更有可能出现。采用串行干扰消除时,用户终端解码 $s_g$ 和 $s_u$ 的接收信号干扰噪声比(SINR)可表示为
$$
\gamma_{u,g}(t_1) = \frac{|\hat{h}
{au}|^2 P_a (1 - \rho)}{|\hat{h}
{au}|^2 P_a \rho + \sigma_{au}^2 P_a + \sigma^2},
$$
$$
\gamma_{u,u}(t_1) = \frac{|\hat{h}
{au}|^2 P_a \rho}{\beta |\hat{h}
{au}|^2 P_a (1 - \rho) + \sigma_{au}^2 P_a + \sigma^2},
$$
其中 $\beta \in [0, 1]$ 为不完全串行干扰消除(iSIC)因子。特别地,$\beta = 0$ 表示完全的串行干扰消除(SIC),即无任何用户间干扰;而 $\beta = 1$ 表示无串行干扰消除,存在最严重的用户间干扰。此处,$t_i$ (i= 1,2)表示时间索引,用于区分两阶段传输的信号干扰噪声比(SINR)。地面终端(GT)在接收到接入点(AP)发送的信号后,直接对接收信号进行解码,并将 $s_u$ 视为用户间干扰。GT处解码 $s_g$ 的信号干扰噪声比(SINR)可表示为
$$
\gamma_{g,g}(t_1) = \frac{|\hat{h}
{ag}|^2 P_a (1 - \rho)}{|\hat{h}
{ag}|^2 P_a \rho + \sigma_{ag}^2 P_a + \sigma^2}.
$$
2) 第二阶段传输
在第二阶段,根据地面终端(GT)处接收到的信干噪比 $\gamma_{g,g}(t_1)$ 以及用户终端(UT)处的 $\gamma_{u,g}(t_1)$,GT和UT共同判断UT是否需要中继已解码的信号 $s_g$ 以协助GT。如果GT在直传阶段从接入点(AP)接收到满足质量要求的信号($\gamma_{g,g}(t_1) \geq \gamma_{tg}$),则GT将向AP和UT回传一个成功消息(1比特),指示UT无需操作,同时AP广播下一个叠加信号,其中 $\gamma_{tg}$ 为解码 $s_g$ 所需的目标SINR门限。否则,GT将回传失败消息,请求UT进行协助。当UT接收到该失败消息后,将进行比较
IV. 中断概率分析
根据所提出的SIRP,用户终端和地面终端的中断概率在不完美串行干扰消除和信道状态信息条件下得到表征。中断概率定义为接收机无法以最低目标速率解码其信号的概率。记 $R_u$ 和 $R_g$ 分别为解码 $s_u$ 和 $s_g$ 所需的最低数据速率。用户终端和地面终端对应的信干噪比门限分别为 $\gamma_g = 2^{R_g} - 1$ 和 $\gamma_u = 2^{R_u} - 1$
在DTM中,相应的信干噪比门限分别为 $\gamma’_g = 2^{2R_g} - 1$ 和 $\gamma’_u = 2^{2R_u} - 1$。在CTM中,相应的信干噪比门限为 $\gamma’_g = 2^{2R_g} - 1$ 和 $\gamma’_u = 2^{2R_u} - 1$。在HTM中,相应的信干噪比门限为 $\gamma_g = 2^{R_g} - 1$ 和 $\gamma’_u = 2^{2R_u} - 1$。根据中继处半双工模式下的接收消息和可用时隙,可以推导出用户终端和地面终端的信干噪比门限。具体而言,在DTM中,用户终端和地面终端可在两个阶段接收两个不同的消息。在CTM中,用户终端可在一阶段由接入点服务,而地面终端可在两个阶段接收相同的消息。在HTM中,用户终端可在一阶段由接入点服务,而地面终端可在两个阶段接收两个不同的消息。
A. SIRP的中断概率分析
在三种传输模式下,解码 $s_u$ 的中断事件可能发生。用户终端解码 $s_u$ 的中断概率由以下给出
$$
P^{\text{SIRP}}
u = 1 - \underbrace{\Pr(\gamma
{g,g}(t_1) \geq \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g, \gamma_{u,u}(t_1) \geq \gamma_u)}
{M_1}
- \underbrace{\Pr(\gamma
{g,g}(t_1) < \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g, \gamma_{u,u}(t_1) \geq \gamma’
u)}
{M_2}
- \underbrace{\Pr(\gamma_{g,g}(t_1) < \gamma_g, \gamma_{u,g}(t_1) < \gamma_g, \gamma_{u,u}(t_1) \geq \gamma’
u)}
{M_3},
$$
其中 $M_1$、$M_2$ 和 $M_3$ 分别对应DTM、CTM和HTM的中断概率。注意,这三种传输模式的中断事件相互独立,且 $\gamma_{g,g}(t_1)$ 与 $\gamma_{u,g}(t_1)$ 以及 $\gamma_{u,u}(t_1)$ 相互独立。
定理1
:基于SIRP的用户终端中断概率的闭式表达式由下式给出,如果 $\gamma_g < \frac{1-\rho}{\rho}$ 且 $\gamma’
u < \frac{\rho}{\beta(1-\rho)}$。否则,用户终端的中断概率为1。
$$
P^{\text{SIRP}}_u = 1 - Q[\sqrt{2K
{ag}}, \sqrt{b_1(\gamma_g)}] Q[\sqrt{2K_{au}}, \sqrt{b_3}] - {1 - Q[\sqrt{2K_{ag}}, \sqrt{b_1(\gamma_g)}]} Q{\sqrt{2K_{au}}, \sqrt{b_2(\gamma’
u)}}
$$
其中 $Q(\sqrt{a}, \sqrt{b}) = \int_b^\infty \frac{1}{2} \exp[-(x+a)/2] I_0(\sqrt{ax}) dx$ 是第一类马库姆Q函数,
$$
b_1(x) = \frac{x (\sigma
{au}^2 P_a + \sigma^2)}{d_{ag}^{\alpha_{ag}} P_a (1 - \rho - x\rho) C}, \quad
b_2(x) = \frac{x (\sigma_{au}^2 P_a + \sigma^2)}{d_{au}^{\alpha_{au}} P_a [\rho - x\beta(1 - \rho)] C}, \quad
b_3 = \max{b_1(\gamma_g), b_2(\gamma_u)}.
$$
另一方面,解码 $s_g$ 的中断事件也可能在三种传输模式中发生。地面终端解码 $s_g$ 对应的中断概率表示为
$$
P^{\text{SIRP}}
g = 1 - \underbrace{\Pr(\gamma
{g,g}(t_1) \geq \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g)}
{M_4}
- \underbrace{\Pr(\gamma
{g,g}(t_1) < \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g, \gamma^{\text{MRC}}
{g,g}(t_2) \geq \gamma’_g)}
{M_5}
- \underbrace{\Pr(\gamma_{g,g}(t_1) < \gamma_g, \gamma_{u,g}(t_1) < \gamma_g, \gamma^{\text{OMA}}
{g,g}(t_2) \geq \gamma_g)}
{M_6}.
$$
定理2
:基于SIRP的地面终端中断概率的闭式表达式由下式给出,如果 $\gamma’
g < \frac{1-\rho}{\rho}$。否则,地面终端的中断概率为1。
$$
P^{\text{SIRP}}_g \approx 1 - Q[\sqrt{2K
{ag}}, \sqrt{b_1(\gamma_g)}] Q[\sqrt{2K_{au}}, \sqrt{b_1(\gamma_g)}] - Q[\sqrt{2K_{au}}, \sqrt{b_1(\gamma’
g)}] \frac{b_1(\gamma_g)}{2} \sum
{i=1}^{N} \omega_i f_2(x_i)
- {Q[\sqrt{2K_{au}}, \sqrt{b_4}] - Q[\sqrt{2K_{au}}, \sqrt{b_1(\gamma_g)}]} {Q[\sqrt{2K_{au}}, \sqrt{b_4}] - Q[\sqrt{2K_{au}}, \sqrt{b_1(\gamma_g)}]}
$$
其中
$$
f_1(x) = \frac{d_{ag}^{-\alpha_{ag}} [\gamma’
g (x P_a \rho + \sigma
{ag}^2 P_a + \sigma^2) - x P_a (1 - \rho)] (\sigma_{ug}^2 P_u + \sigma^2)}{d_{ug}^{-\alpha_{ug}} P_u (C d_{ag}^{-\alpha_{ag}} x P_a \rho + \sigma_{ag}^2 P_a + \sigma^2)},
$$
$$
f_2(x) = \sqrt{1 - x^2} f_{\Omega_{ag}}\left(\frac{b_1(\gamma_g)}{2} x + \frac{b_1(\gamma_g)}{2}\right) Q[\sqrt{2K_{ug}}, \sqrt{f_1\left(\frac{b_1(\gamma_g)}{2} x + \frac{b_1(\gamma_g)}{2}\right)}],
$$
$\omega_i = \frac{\pi}{N}$, $x_i = \cos\left[\frac{(2i-1)\pi}{2N}\right]$,且 $N$ 是一个复杂度与精度的权衡参数。
项 $M_6$ 可表示为
$$
M_6 = \Pr(\Omega_{ag} < b_1(\gamma_g), b_4 \leq \Omega_{au} < b_1(\gamma_g))
= {1 - Q[\sqrt{2K_{ag}}, \sqrt{b_1(\gamma_g)}]} \times {Q[\sqrt{2K_{au}}, \sqrt{b_4}] - Q[\sqrt{2K_{au}}, \sqrt{b_1(\gamma_g)}]},
$$
其中步骤基于 $\gamma_g < \frac{1-\rho}{\rho}$ 和 $b_4 = \frac{\gamma_g (\sigma_{au}^2 P_a + \sigma^2)}{C P_a d_{au}^{-\alpha_{au}}}$。
B. IRP和FRP的中断概率
对于IRP,存在两种传输模式,即DTM和CTM。用户终端和地面终端的中断概率由以下给出
$$
P^{\text{IRP}}
u = 1 - \Pr(\gamma
{g,g}(t_1) \geq \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g, \gamma_{u,u}(t_1) \geq \gamma_u) - \Pr(\gamma_{g,g}(t_1) < \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g, \gamma_{u,u}(t_1) \geq \gamma’
u)
$$
和
$$
P^{\text{IRP}}_g = 1 - \Pr(\gamma
{g,g}(t_1) \geq \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g) - \Pr(\gamma_{g,g}(t_1) < \gamma_g, \gamma_{u,g}(t_1) \geq \gamma_g, \gamma^{\text{MRC}}_{g,g}(t_2) \geq \gamma’_g),
$$
分别地。
对于FRP,仅存在一种传输模式,即UT始终向GT转发 $s_g$。UT和GT的中断概率表示为
$$
P^{\text{FRP}}
u = 1 - \Pr(\gamma
{u,g}(t_1) \geq \gamma_g, \gamma_{u,u}(t_1) \geq \gamma’
u)
$$
和
$$
P^{\text{FRP}}_g = 1 - \Pr(\gamma
{g,g}(t_1) \geq \gamma_g, \gamma_{u,g}(t_1) \geq \gamma’_g),
$$
分别。
备注1 :通过比较公式(19)和公式(28),我们可以得到 $P^{\text{SIRP}}_u < P^{\text{IRP}}_u$,因为 $P^{\text{SIRP}}_u$ 减去了附加项 $M_3$。此外,根据 $\gamma’_g > \gamma_g$ 以及 $\gamma’_u > \gamma_u$ 这一事实,可以推导出结果 $P^{\text{IRP}}_u < P^{\text{FRP}}_u$。以类似的方式,也可得到 $P^{\text{SIRP}}_g < P^{\text{IRP}}_g < P^{\text{FRP}}_g$。因此,可以总结出在无人机赋能的NOMA网络中,SIRP应优于IRP和FRP。
V. 仿真结果
本节提供蒙特卡洛仿真,以评估无人机使能的NOMA网络中所提出的SIRP,并验证性能分析的正确性。此外,还给出了基准方案(如IRP和FRP)的仿真结果,以证明SIRP的优势。进一步地,还研究了关键参数对用户终端和地面终端中断概率的影响。根据[7]和[8],仿真参数设置为 $f_c = 2$ GHz,$a = 11.95$,$b = 0.14$,$G_t = G_r = 3$ dB,$\xi_0 = 2$,$\xi_1 = 1.5$,$K_0 = 5$ dB,$K_{\text{max}} = 15$ dB,$\rho = 0.3$,$\sigma_i = 0.01$,$\sigma^2 = 1$,$\beta = 0.1$,$(x_u, y_u, z_u) = (100, 50, 50)$,$(x_g, y_g, z_g) = (200, 100, 0)$,单位为米,$P_a = 23$ dBm,$R_u = 0.2$ bps,和 $R_g = 0.05$ bps。发射信噪比定义为接入点发射功率与噪声功率之比[19]。
图3展示了两个终端的中断概率与发射信噪比之间的关系。分析结果与仿真结果吻合良好。可以观察到,在用户终端和地面终端的中断概率方面,所提出的SIRP优于基准方案IRP和FRP。此外,基于增量中继的方案(包括SIRP和IRP)相比固定中继方案。原因解释如下。SIRP和IRP均采用相同的增量中继协议,该协议根据GT的接收的信干噪比,仅从GT向UT反馈极少量的消息。如果GT处能够满足目标速率,则UT无需进行中继。在第二阶段,AP可以同时为UT和GT服务。另一方面,FRP始终要求UT持续中继GT的信号。在第二阶段,只有GT被服务,而UT无法接收到任何所需信息。
图4描述了两个终端的中断概率与地面终端目标速率之间的关系。可以看出,无论地面终端的目标速率如何,SIRP中用户终端和地面终端的中断概率始终低于IRP和FRP中的情况。此外,在较高的地面终端目标速率区域,SIRP相较于其他方案的优势更加明显。最后,可以观察到信道估计误差对两个终端均具有显著影响。特别是从中断概率的角度来看,较大的信道估计误差对地面终端的影响大于对用户终端的影响。其原因是,用户终端的中断概率仅由基于无线信道 $h_{au}$ 在用户终端处解码 $s_u$ 的信号干扰噪声比决定;而不同于用户终端,地面终端的中断概率取决于用户终端采用串行干扰消除的检测以及地面终端自身的检测,涉及无线信道 $h_{au}$、$h_{ag}$ 和 $h_{ug}$,这三个信道均可能引入信道估计误差。因此,信道估计误差对地面终端的影响大于对用户终端的影响。
六、结论
本文提出了一种用于无人机使能的NOMA网络的新型SIRP,并研究了在不完美CSI和SIC下的网络性能。具体而言,考虑基于仰角的路径损耗指数和小尺度衰落,推导了用户终端和地面终端中断概率的闭式解。此外,理论和仿真结果均证明,在无人机使能的NOMA网络中,所提出的SIRP相比其对应方案IRP和FRP具有更优的中断性能。而且,在中断概率方面,信道估计误差对地面终端的影响大于用户终端。将本工作扩展至多小区网络将作为我们未来工作的一个有趣课题。

















 222
222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









