



由于毕设做无人机自主避障的需要,最近跑了一些SOTA的VSLAM和VISLAM开源项目,主要包括ORB-SLAM系列、VINS系列,鉴于配置环境不堪其苦,遂摸鱼撰文记录一下学习心得,后续打算不定时更新一些复现SOTA的SLAM框架的过程记录帖。喜欢SLAM的小伙伴一起分享讨论。
目录
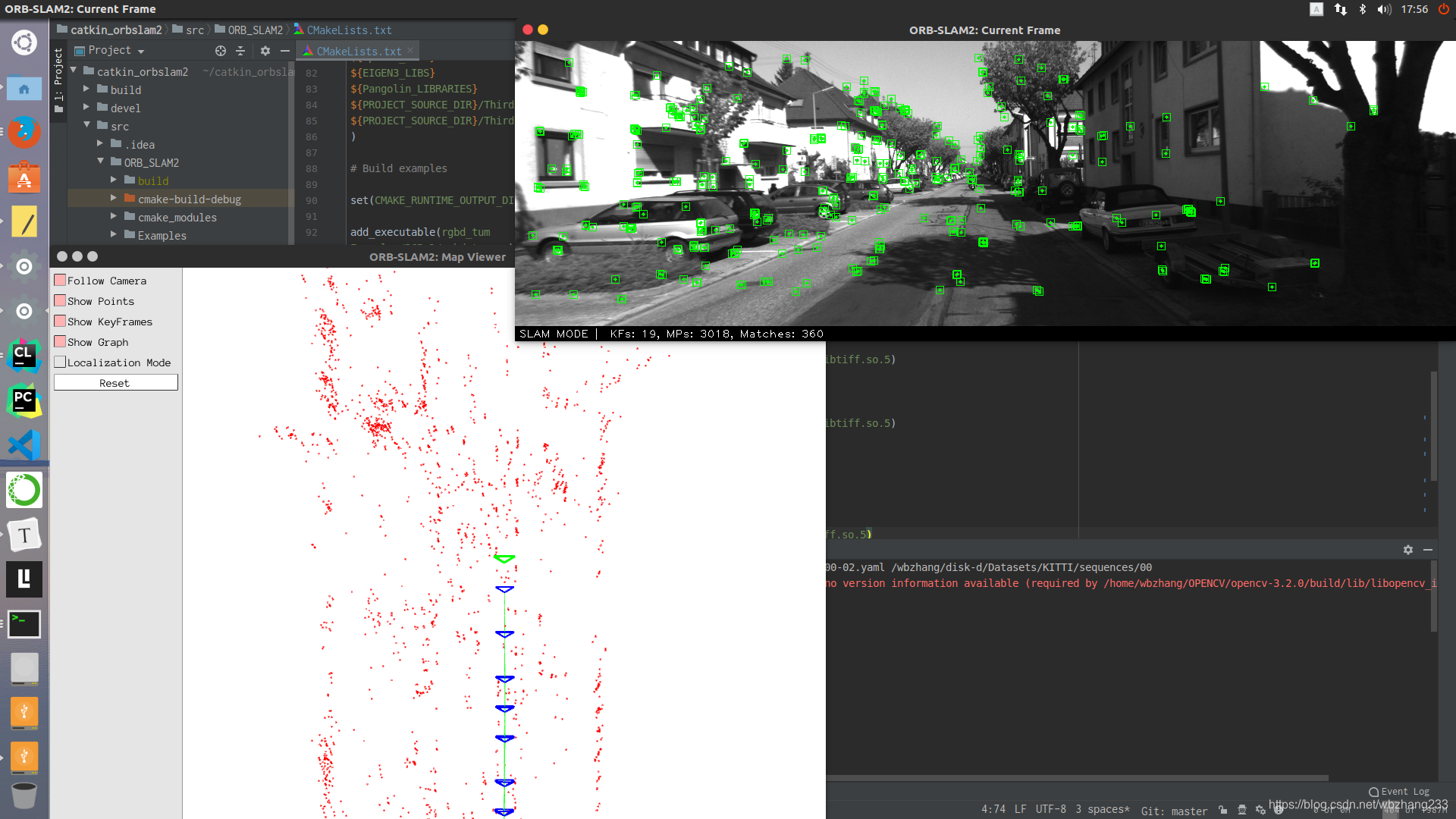
1.ORB-SLAM2
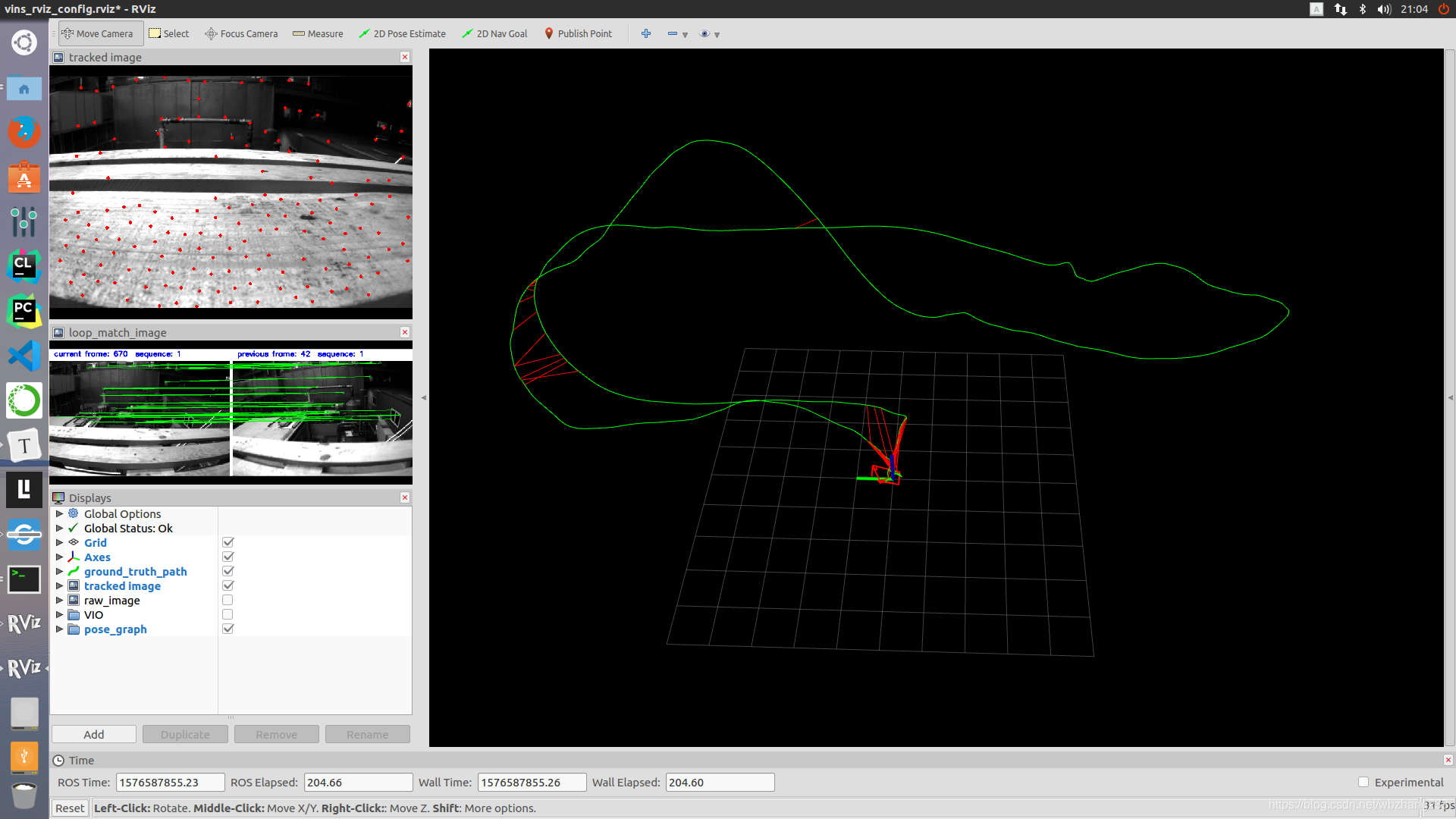
2.VINS-MONO
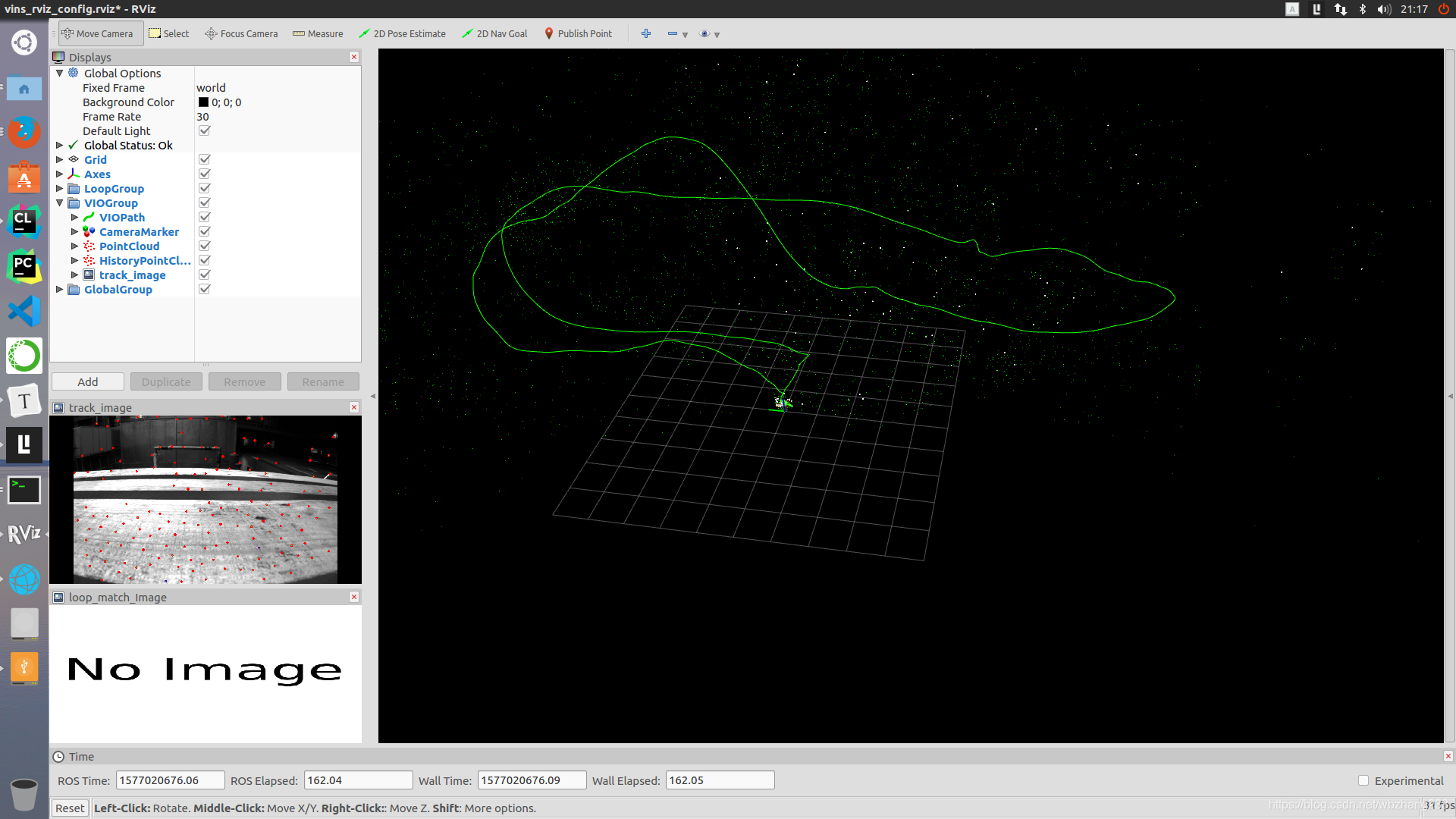
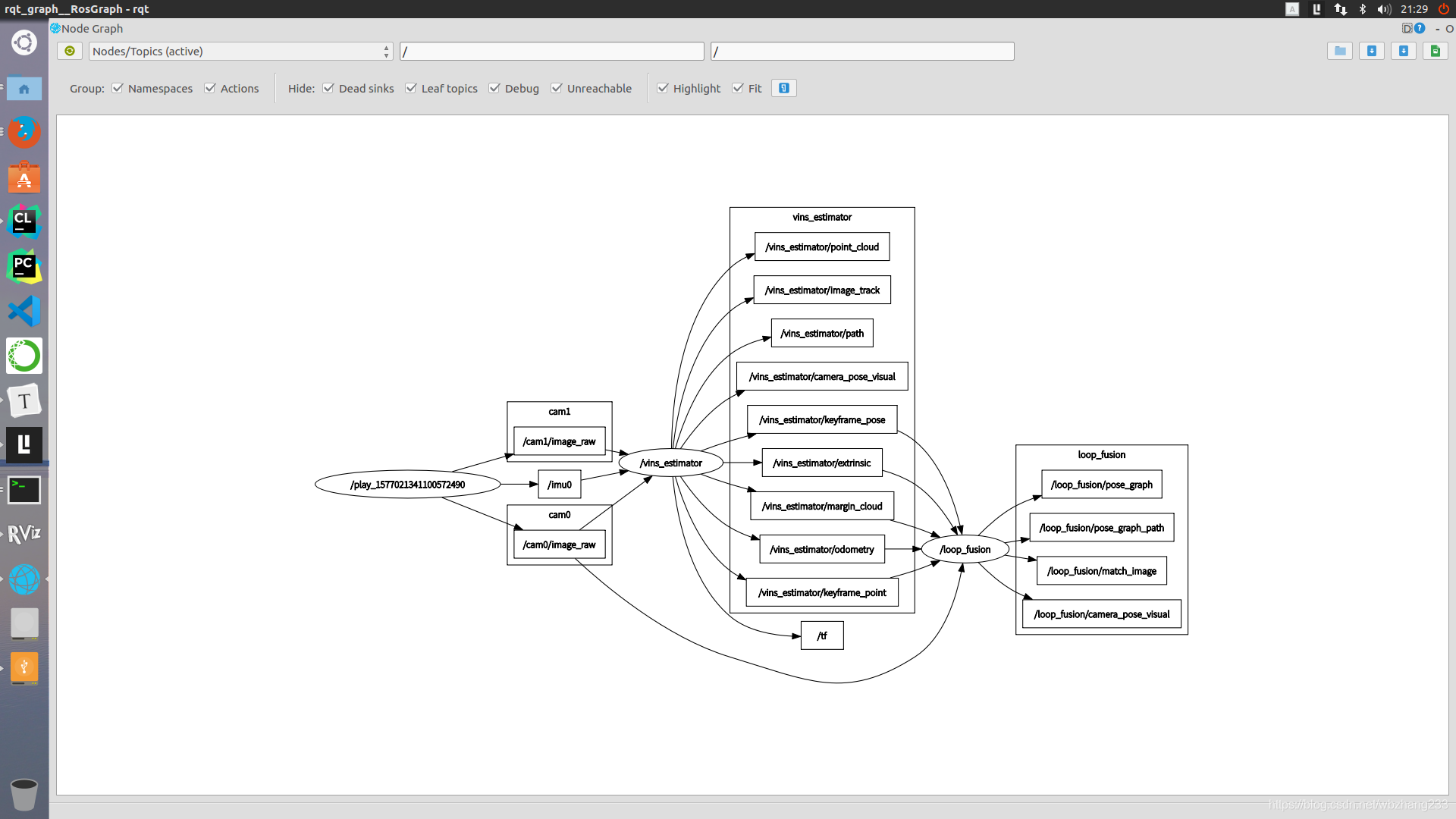
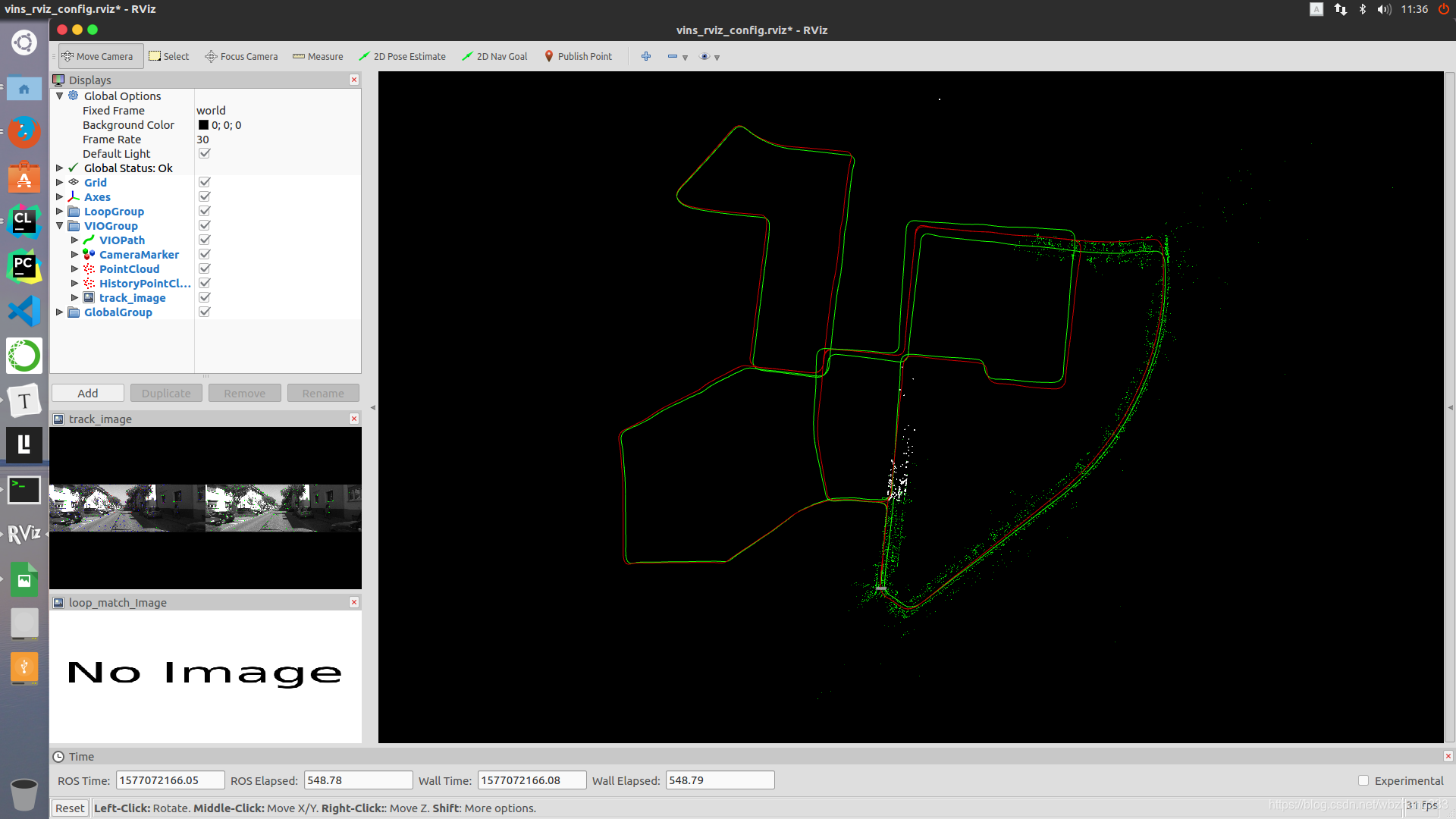
3.VINS-Fusion
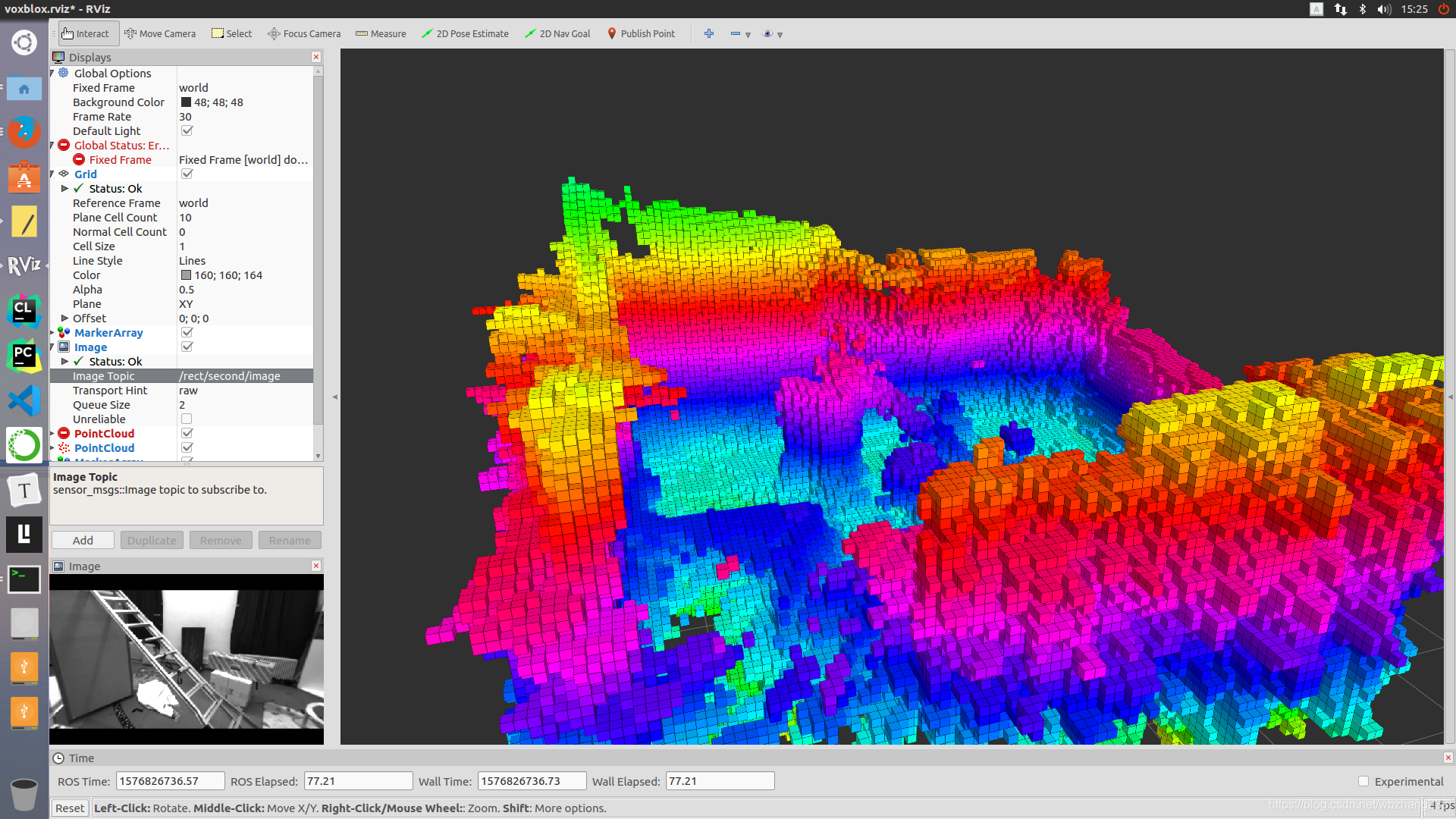
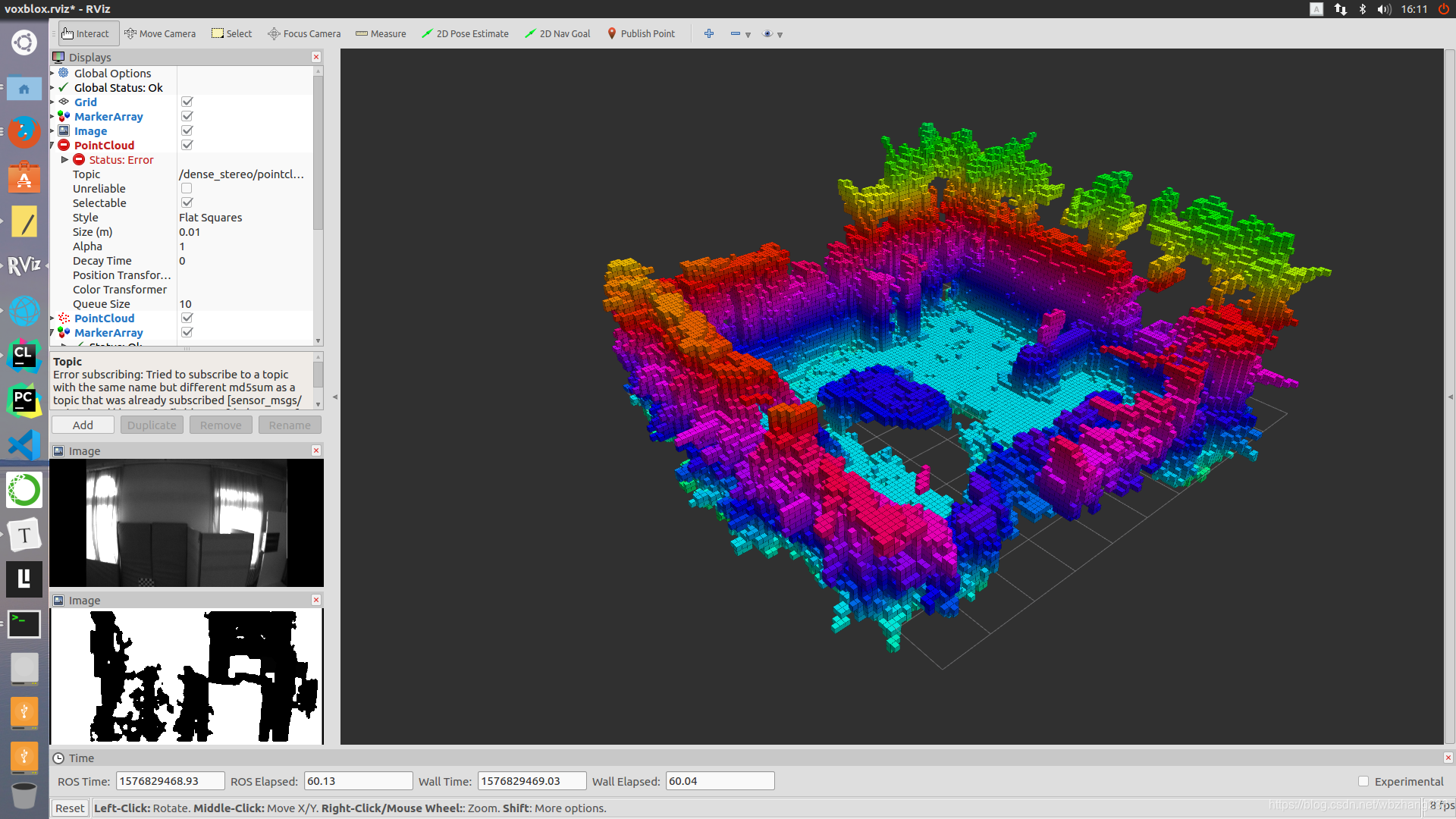
4.Vox-blox
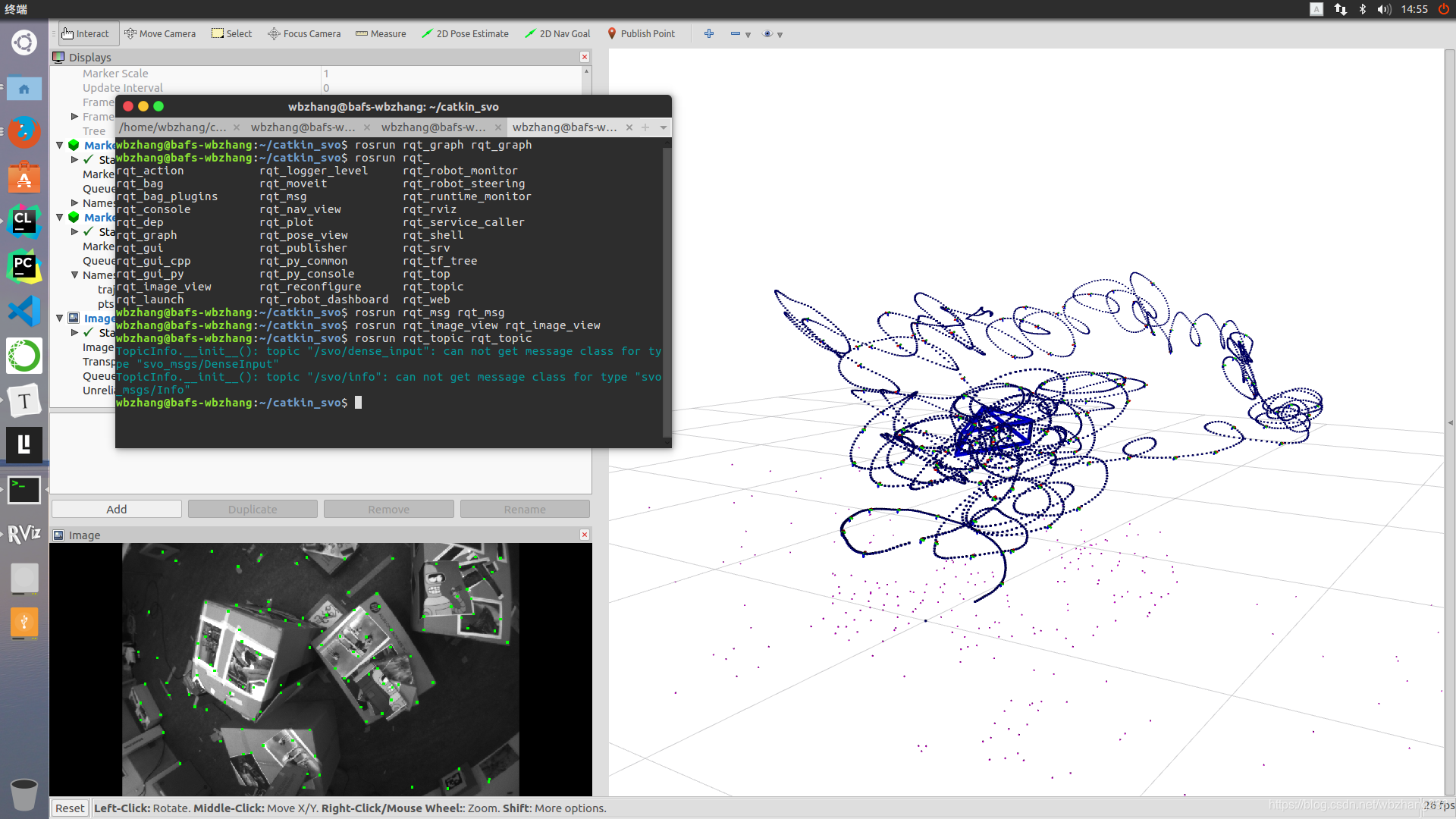
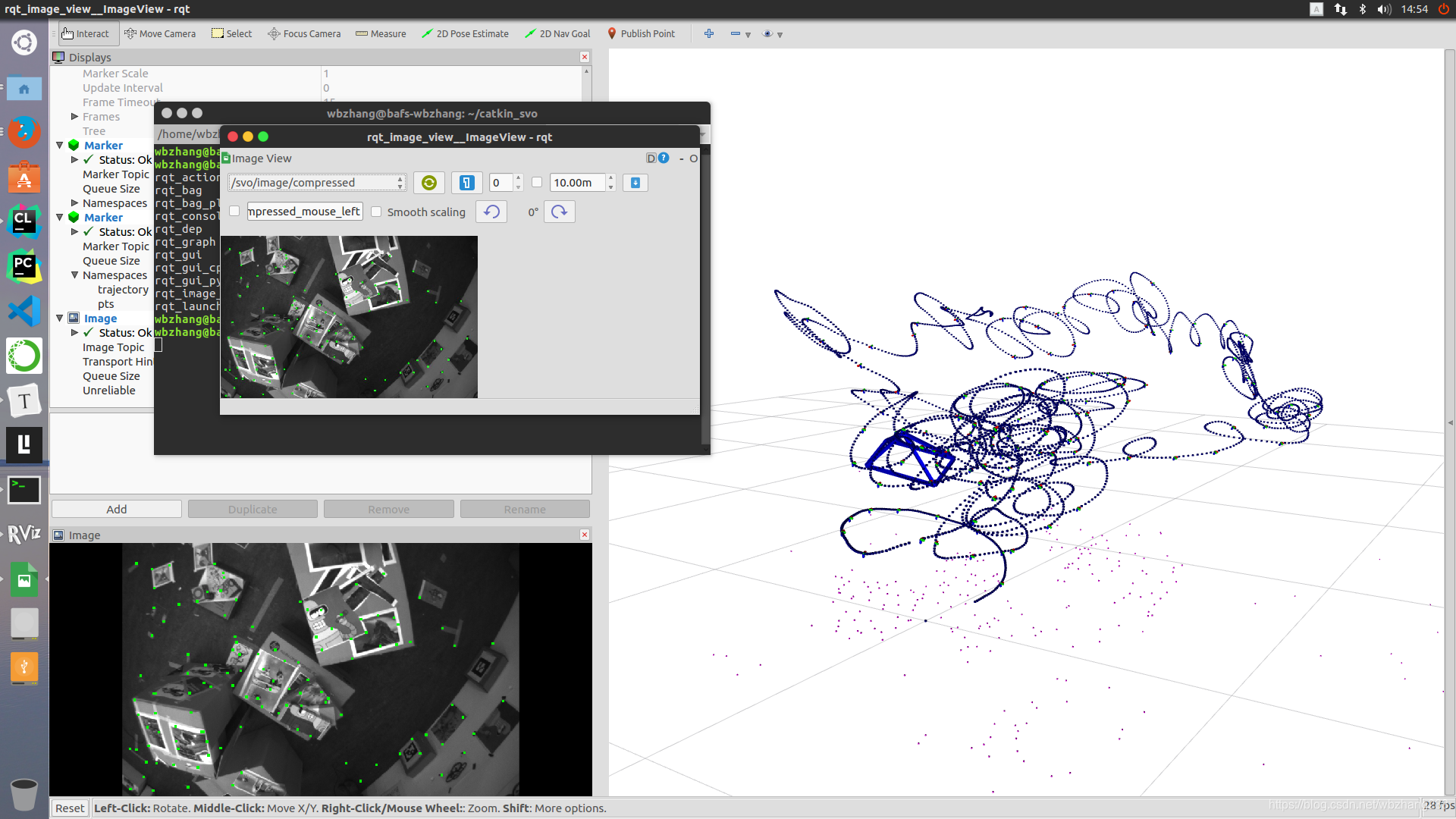
5.SVO
6.CNN-SVO
由于毕设做无人机自主避障的需要,最近跑了一些SOTA的VSLAM和VISLAM开源项目,主要包括ORB-SLAM系列、VINS系列,鉴于配置环境不堪其苦,遂摸鱼撰文记录一下学习心得,后续打算不定时更新一些复现SOTA的SLAM框架的过程记录帖。喜欢SLAM的小伙伴一起分享讨论。
目录
 1612
2228
2334
1612
2228
2334

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























