




编程总结
每每刷完一道题后,其思想和精妙之处没有地方记录,本篇博客用以记录刷题过程中的遇到的算法和技巧
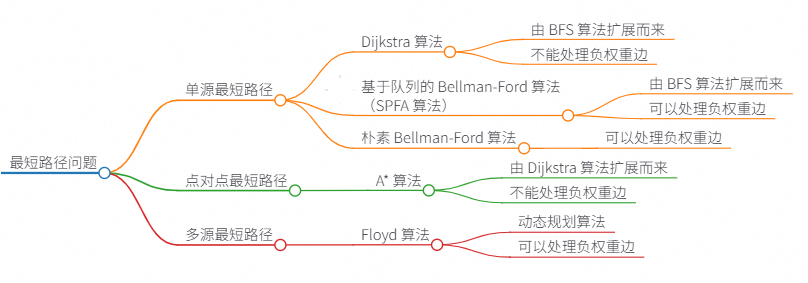
Dijkstra 算法_求最短路径
Dijkstra 算法是一种用于计算图中单源最短路径的算法,其本质是标准 BFS 算法 + 贪心思想。
如果图中包含负权重边,会让贪心思想失效,所以 Dijkstra 只能处理不包含负权重边的图。
Dijkstra 算法和标准的 BFS 算法的区别只有两个:
1、标准 BFS 算法使用普通队列,Dijkstra 算法使用优先级队列,让距离起点更近的节点优先出队(贪心思想的体现)。
2、标准 BFS 算法使用一个 visited 数组记录访问过的节点,确保算法不会陷入死循环;Dijkstra 算法使用一个 distTo 数组,确保算法不会陷入死循环,同时记录起点到其他节点的最短路径。
dijkstra 算法 同样是贪心的思路,不断寻找距离 源点最近的没有访问过的节点。
这里给出 dijkstra三部曲:
第一步,选源点到哪个节点近且该节点未被访问过
第二步,该最近节点被标记访问过
第三步,更新非访问节点到源点的距离(即更新minDist数组)
算法源码
/*
* Dijkstra最短路径。
* 即,统计图(G)中"顶点vs"到其它各个顶点的最短路径。
* 参数说明:
* G -- 图
* vs -- 起始顶点(start vertex)。即计算"顶点vs"到其它顶点的最短路径。
* prev -- 前驱顶点数组。即,prev[i]的值是"顶点vs"到"顶点i"的最短路径所经历的全部顶点中,位于"顶点i"之前的那个顶点。
* dist -- 长度数组。即,dist[i]是"顶点vs"到"顶点i"的最短路径的长度。
*/
void dijkstra(Graph G, int vs, int prev[], int dist[])
{
int i,j,k;
int min;
int tmp;
int flag[MAX]; // flag[i]=1表示"顶点vs"到"顶点i"的最短路径已成功获取。
// 初始化
for (i = 0; i < G.vexnum; i++)
{
flag[i] = 0; // 顶点i的最短路径还没获取到。
prev[i] = 0; // 顶点i的前驱顶点为0。
dist[i] = G.matrix[vs][i];// 顶点i的最短路径为"顶点vs"到"顶点i"的权。
}
// 对"顶点vs"自身进行初始化
flag[vs] = 1;
dist[vs] = 0;
// 遍历G.vexnum-1次;每次找出一个顶点的最短路径。
for (i = 1; i < G.vexnum; i++)
{
// 寻找当前最小的路径;
// 即,在未获取最短路径的顶点中,找到离vs最近的顶点(k)。
min = INF;
for (j = 0; j < G.vexnum; j++)
{
if (flag[j]==0 && dist[j]<min)
{
min = dist[j];
k = j;
}
}
// 标记"顶点k"为已经获取到最短路径
flag[k] = 1;
// 修正当前最短路径和前驱顶点
// 即,当已经"顶点k的最短路径"之后,更新"未获取最短路径的顶点的最短路径和前驱顶点"。
for (j = 0; j < G.vexnum; j++)
{
tmp = (G.matrix[k][j]==INF ? INF : (min + G.matrix[k][j])); // 防止溢出
if (flag[j] == 0 && (tmp < dist[j]) )
{
dist[j] = tmp;
prev[j] = k;
}
}
}
// 打印dijkstra最短路径的结果
printf("dijkstra(%c): \n", G.vexs[vs]);
for (i = 0; i < G.vexnum; i++)
printf(" shortest(%c, %c)=%d\n", G.vexs[vs], G.vexs[i], dist[i]);
}
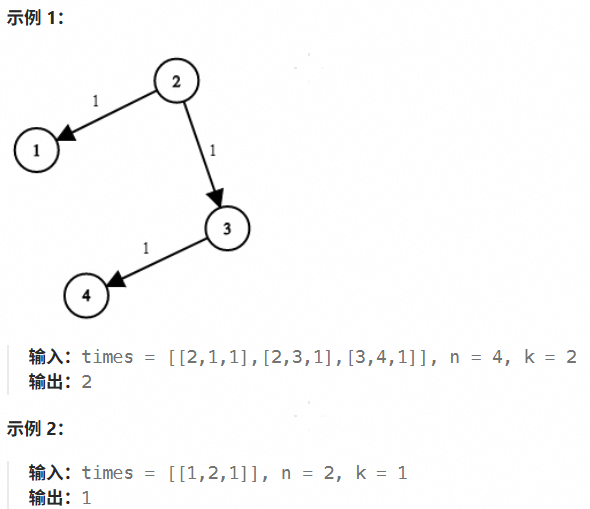
743. 网络延迟时间
有 n 个网络节点,标记为 1 到 n。
给你一个列表 times,表示信号经过 有向 边的传递时间。 times[i] = (ui, vi, wi),其中 ui 是源节点,vi 是目标节点, wi 是一个信号从源节点传递到目标节点的时间。
现在,从某个节点 K 发出一个信号。需要多久才能使所有节点都收到信号?如果不能使所有节点收到信号,返回 -1 。
int networkDelayTime(int **times, int timesSize, int *timesColSize, int n, int k)
{
const int inf = 0x3f3f3f3f;
int g[n][n];
memset(g, 0x3f, sizeof(g));
for (int i = 0; i < timesSize; i++) {
int x = times[i][0] - 1;
int y = times[i][1] - 1;
g[x][y] = times[i][2]; // 权重
}
int dist[n]; // 记录所有节点到源点的最短路径
memset(dist, 0x3f, sizeof(dist));
dist[k - 1] = 0;
int used[n]; // 标记是否访问过
memset(used, 0, sizeof(used));
int ans = 0;
for (int i = 0; i < n; ++i) {
int x = -1;
for (int y = 0; y < n; ++y) {
// 第一步,选源点到哪个节点近且该节点未被访问过
if ((used[y] == 0) && (x == -1 || dist[y] < dist[x])) {
x = y;
}
}
used[x] = 1; // 第二步,该最近节点被标记访问过
// 第三步,更新非访问节点到源点的距离(即更新minDist数组)
ans = fmax(ans, dist[x]);
for (int y = 0; y < n; ++y) {
dist[y] = fmin(dist[y], dist[x] + g[x][y]);
}
}
return ans == inf ? -1 : ans;
}
Bellman-ford 算法 – 权重存在负数
Bellman_ford算法的核心思想是 对所有边进行松弛n-1次操作(n为节点数量),从而求得目标最短路。
什么叫做松弛
看到这里,估计大家都比较晕了,为什么是 n-1 次,那“松弛”这两个字究竟是个啥意思?
我们先来说什么是 “松弛”。
《算法四》里面把这个操作叫做 “放松”, 英文版里叫做 “relax the edge”
所以大家翻译过来,就是 “放松” 或者 “松弛” 。
但《算法四》没有具体去讲这个 “放松” 究竟是个啥? 网上很多题解也没有讲题解里的 “松弛这条边,松弛所有边”等等 里面的 “松弛” 究竟是什么意思?
这里我给大家举一个例子,每条边有起点、终点和边的权值。例如一条边,节点A 到 节点B 权值为value,如图:
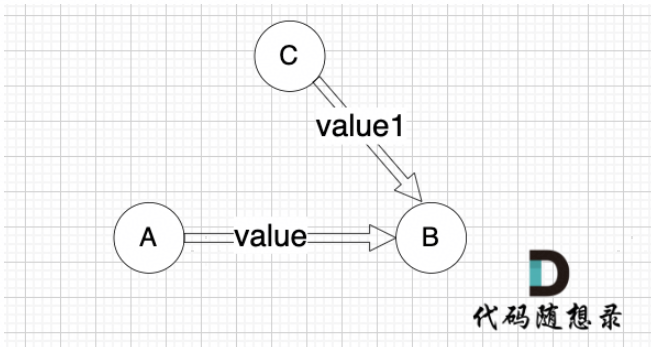
minDist[B] 表示 到达B节点 最小权值,minDist[B] 有哪些状态可以推出来?
状态一: minDist[A] + value 可以推出 minDist[B] 状态二: minDist[B]本身就有权值 (可能是其他边链接的节点B 例如节点C,以至于 minDist[B]记录了其他边到minDist[B]的权值)
minDist[B] 应为如何取舍。
本题我们要求最小权值,那么 这两个状态我们就取最小的
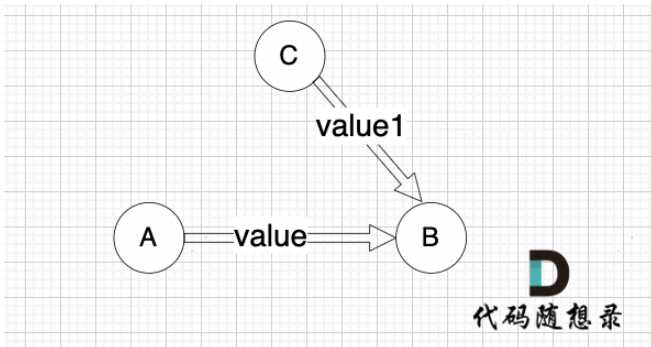
if (minDist[B] > minDist[A] + value) minDist[B] = minDist[A] + value
也就是说,如果 通过 A 到 B 这条边可以获得更短的到达B节点的路径,即如果 minDist[B] > minDist[A] + value,那么我们就更新 minDist[B] = minDist[A] + value ,这个过程就叫做 “松弛” 。
Floyd 算法 – 多源最短路径算法
而本题是多源最短路,即 求多个起点到多个终点的多条最短路径。
通过本题,我们来系统讲解一个新的最短路算法-Floyd 算法。
Floyd 算法对边的权值正负没有要求,都可以处理。
Floyd算法核心思想是动态规划。
给出过动规五部曲:
确定dp数组(dp table)以及下标的含义
确定递推公式
dp数组如何初始化
确定遍历顺序
举例推导dp数组
A* 算法 – 点对点的最优路径
Astar
Astar 是一种 广搜的改良版。 有的是 Astar是 dijkstra 的改良版。
其实只是场景不同而已 我们在搜索最短路的时候, 如果是无权图(边的权值都是1) 那就用广搜,代码简洁,时间效率和 dijkstra 差不多 (具体要取决于图的稠密)
如果是有权图(边有不同的权值),优先考虑 dijkstra。
而 Astar 关键在于 启发式函数, 也就是 影响 广搜或者 dijkstra 从 容器(队列)里取元素的优先顺序。
以下,我用BFS版本的A * 来进行讲解。
在BFS中,我们想搜索,从起点到终点的最短路径,要一层一层去遍历。
看出 A * 可以节省很多没有必要的遍历步骤。
为了让大家可以明显看到区别,我将 BFS 和 A * 制作成可视化动图,大家可以自己看看动图,效果更好。
地址:https://kamacoder.com/tools/knight.html
那么 A * 为什么可以有方向性的去搜索,它的如何知道方向呢?
其关键在于 启发式函数。
这是影响BFS搜索方向的关键。
对队列里节点进行排序,就需要给每一个节点权值,如何计算权值呢?
每个节点的权值为F,给出公式为:F = G + H
G:起点达到目前遍历节点的距离
H:目前遍历的节点到达终点的距离
起点达到目前遍历节点的距离 + 目前遍历的节点到达终点的距离 就是起点到达终点的距离。
本题的图是无权网格状,在计算两点距离通常有如下三种计算方式:
曼哈顿距离,计算方式: d = abs(x1-x2)+abs(y1-y2)
欧氏距离(欧拉距离) ,计算方式:d = sqrt( (x1-x2)^2 + (y1-y2)^2 )
切比雪夫距离,计算方式:d = max(abs(x1 - x2), abs(y1 - y2))
x1, x2 为起点坐标,y1, y2 为终点坐标 ,abs 为求绝对值,sqrt 为求开根号,
选择哪一种距离计算方式 也会导致 A * 算法的结果不同。
本题,采用欧拉距离才能最大程度体现 点与点之间的距离。
所以 使用欧拉距离计算 和 广搜搜出来的最短路的节点数是一样的。 (路径可能不同,但路径上的节点数是相同的)
我在制作动画演示的过程中,分别给出了曼哈顿、欧拉以及契比雪夫 三种计算方式下,A * 算法的寻路过程,大家可以自己看看看其区别。
动画地址:https://kamacoder.com/tools/knight.html
计算出来 F 之后,按照 F 的 大小,来选去出队列的节点。
可以使用 优先级队列 帮我们排好序,每次出队列,就是F最小的节点。
实现代码如下:(启发式函数 采用 欧拉距离计算方式)
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
// 定义一个结构体,表示棋盘上骑士的位置和相关的 A* 算法参数
typedef struct {
int x, y; // 骑士在棋盘上的坐标
int g; // 从起点到当前节点的实际消耗
int h; // 从当前节点到目标节点的估计消耗(启发式函数值)
int f; // 总的估计消耗(f = g + h)
} Knight;
#define MAX_HEAP_SIZE 2000000 // 假设优先队列的最大容量
// 定义一个优先队列,使用最小堆来实现 A* 算法中的 Open 列表
typedef struct {
Knight data[MAX_HEAP_SIZE];
int size;
} PriorityQueue;
// 初始化优先队列
void initQueue(PriorityQueue *pq) {
pq->size = 0;
}
// 将骑士节点插入优先队列
void push(PriorityQueue *pq, Knight k) {
if (pq->size >= MAX_HEAP_SIZE) {
// 堆已满,无法插入新节点
return;
}
int i = pq->size++;
pq->data[i] = k;
// 上滤操作,维护最小堆的性质,使得 f 值最小的节点在堆顶
while (i > 0) {
int parent = (i - 1) / 2;
if (pq->data[parent].f <= pq->data[i].f) {
break;
}
// 交换父节点和当前节点
Knight temp = pq->data[parent];
pq->data[parent] = pq->data[i];
pq->data[i] = temp;
i = parent;
}
}
// 从优先队列中弹出 f 值最小的骑士节点
Knight pop(PriorityQueue *pq) {
Knight min = pq->data[0];
pq->size--;
pq->data[0] = pq->data[pq->size];
// 下滤操作,维护最小堆的性质
int i = 0;
while (1) {
int left = 2 * i + 1;
int right = 2 * i + 2;
int smallest = i;
if (left < pq->size && pq->data[left].f < pq->data[smallest].f) {
smallest = left;
}
if (right < pq->size && pq->data[right].f < pq->data[smallest].f) {
smallest = right;
}
if (smallest == i) {
break;
}
// 交换当前节点与最小子节点
Knight temp = pq->data[smallest];
pq->data[smallest] = pq->data[i];
pq->data[i] = temp;
i = smallest;
}
return min;
}
// 判断优先队列是否为空
int isEmpty(PriorityQueue *pq) {
return pq->size == 0;
}
// 启发式函数:计算从当前位置到目标位置的欧几里得距离的平方(避免开方,提高效率)
int heuristic(int x, int y, int goal_x, int goal_y) {
int dx = x - goal_x;
int dy = y - goal_y;
return dx * dx + dy * dy; // 欧几里得距离的平方
}
// 用于记录从起点到棋盘上每个位置的最小移动次数
int moves[1001][1001];
// 骑士在棋盘上的8个可能移动方向
int dir[8][2] = {
{-2, -1}, {-2, 1}, {-1, 2}, {1, 2},
{2, 1}, {2, -1}, {1, -2}, {-1, -2}
};
// 使用 A* 算法寻找从起点到目标点的最短路径
int astar(int start_x, int start_y, int goal_x, int goal_y) {
PriorityQueue pq;
initQueue(&pq);
// 初始化 moves 数组,-1 表示未访问过的位置
memset(moves, -1, sizeof(moves));
moves[start_x][start_y] = 0; // 起点位置的移动次数为 0
// 初始化起始节点
Knight start;
start.x = start_x;
start.y = start_y;
start.g = 0;
start.h = heuristic(start_x, start_y, goal_x, goal_y);
start.f = start.g + start.h; // 总的估计消耗
push(&pq, start); // 将起始节点加入优先队列
while (!isEmpty(&pq)) {
Knight current = pop(&pq); // 取出 f 值最小的节点
// 如果已经到达目标位置,返回所需的最小移动次数
if (current.x == goal_x && current.y == goal_y) {
return moves[current.x][current.y];
}
// 遍历当前节点的所有可能移动方向
for (int i = 0; i < 8; i++) {
int nx = current.x + dir[i][0];
int ny = current.y + dir[i][1];
// 检查新位置是否在棋盘范围内且未被访问过
if (nx >= 1 && nx <= 1000 && ny >= 1 && ny <= 1000 && moves[nx][ny] == -1) {
moves[nx][ny] = moves[current.x][current.y] + 1; // 更新移动次数
// 创建新节点,表示骑士移动到的新位置
Knight neighbor;
neighbor.x = nx;
neighbor.y = ny;
neighbor.g = current.g + 5; // 每次移动的消耗为 5(骑士移动的距离平方)
neighbor.h = heuristic(nx, ny, goal_x, goal_y);
neighbor.f = neighbor.g + neighbor.h;
push(&pq, neighbor); // 将新节点加入优先队列
}
}
}
return -1; // 如果无法到达目标位置,返回 -1
}
int main() {
int n;
scanf("%d", &n);
while (n--) {
int a1, a2, b1, b2; // 起点和目标点的坐标
scanf("%d %d %d %d", &a1, &a2, &b1, &b2);
int result = astar(a1, a2, b1, b2); // 使用 A* 算法计算最短路径
printf("%d\n", result); // 输出最小移动次数
}
return 0;
}
127. 骑士的攻击
一个坐标可以从 -infinity 延伸到 +infinity 的 无限大的 棋盘上,你的 骑士 驻扎在坐标为 [0, 0] 的方格里。
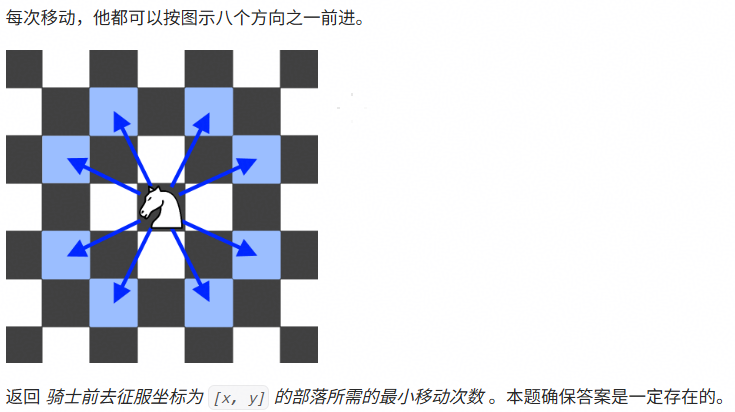
骑士的走法和中国象棋中的马相似,走 “日” 字:即先向左(或右)走 1 格,再向上(或下)走 2 格;或先向左(或右)走 2 格,再向上(或下)走 1 格。
每次移动,他都可以按图示八个方向之一前进。
示例 1:
输入:x = 2, y = 1
输出:1
解释:[0, 0] → [2, 1]
示例 2:
输入:x = 5, y = 5
输出:4
解释:[0, 0] → [2, 1] → [4, 2] → [3, 4] → [5, 5]
提示:
-300 <= x, y <= 300
0 <= |x| + |y| <= 300
#define SIZE 607
// 八个方向的偏移量
int offsets[8][2] = {{1, 2}, {2, 1}, {2, -1}, {1, -2},
{-1, -2}, {-2, -1}, {-2, 1}, {-1, 2}};
int minKnightMoves(int x, int y)
{
// 初始化起始点
int queue[SIZE * SIZE][2];
int head = 0, tail = 0;
bool visited[SIZE][SIZE] = {false};
int steps = 0;
queue[tail][0] = 302; // 使用中心化偏移, -300 <= x, y <= 300 不让数组出现负数
queue[tail][1] = 302;
tail++;
visited[302][302] = 0;
while (head < tail) {
int currLevelSize = tail - head;
// 遍历当前层
for (int i = 0; i < currLevelSize; i++) {
int currX = queue[head][0];
int currY = queue[head][1];
head++;
if ((currX == x + 302) && (currY == y + 302)) {
return steps;
}
for (int j = 0; j < 8; j++) {
int nextX = currX + offsets[j][0];
int nextY = currY + offsets[j][1];
if (visited[nextX][nextY] == 0) {
visited[nextX][nextY] = 1;
queue[tail][0] = nextX; // 使用中心化偏移
queue[tail][1] = nextY;
tail++;
}
}
}
steps++;
}
return steps;
}
拓扑排序指的是一种 解决问题的大体思路, 而具体算法,可能是广搜也可能是深搜。
大家可能发现 各式各样的解法,纠结哪个是拓扑排序?
其实只要能在把 有向无环图 进行线性排序 的算法 都可以叫做 拓扑排序。
实现拓扑排序的算法有两种:卡恩算法(BFS)和DFS
一般来说我们只需要掌握 BFS (广度优先搜索)就可以了,清晰易懂,如果还想多了解一些,可以再去学一下 DFS 的思路,但 DFS 不是本篇重点。
207. 课程表_拓扑排序
你这个学期必须选修 numCourses 门课程,记为 0 到 numCourses - 1 。
在选修某些课程之前需要一些先修课程。 先修课程按数组 prerequisites 给出,其中 prerequisites[i] = [ai, bi] ,表示如果要学习课程 ai 则 必须 先学习课程 bi 。
例如,先修课程对 [0, 1] 表示:想要学习课程 0 ,你需要先完成课程 1 。
请你判断是否可能完成所有课程的学习?如果可以,返回 true ;否则,返回 false 。
示例 1:
输入:numCourses = 2, prerequisites = [[1,0]]
输出:true
解释:总共有 2 门课程。学习课程 1 之前,你需要完成课程 0 。这是可能的。
示例 2:
输入:numCourses = 2, prerequisites = [[1,0],[0,1]]
输出:false
解释:总共有 2 门课程。学习课程 1 之前,你需要先完成课程 0 ;并且学习课程 0 之前,你还应先完成课程 1 。这是不可能的。
bool canFinish(int numCourses, int **prerequisites, int prerequisitesSize, int *prerequisitesColSize)
{
int **edges = (int **)malloc(sizeof(int *) * (numCourses)); // 邻接表
int *edgeColSize = (int *)malloc(sizeof(int) * (numCourses));
memset(edgeColSize, 0, sizeof(int) * (numCourses));
for (int i = 0; i < (numCourses); i++) {
edges[i] = (int *)malloc(sizeof(int) * 2000);
}
int indeg[numCourses]; // 存储每个节点的入度
memset(indeg, 0, sizeof(indeg));
for (int i = 0; i < prerequisitesSize; ++i) {
int a = prerequisites[i][1]; // 依赖项,学习b之前需要学习a b->a
int b = prerequisites[i][0];
edgeColSize[a]++;
edges[a][edgeColSize[a] - 1] = b;
++indeg[b];
}
int queue[numCourses];
int head = 0, tail = 0;
// 1. 入度为0,进队列,示例即为 课程3与课程4,因为他们没有依赖
for (int i = 0; i < numCourses; ++i) {
if (indeg[i] == 0) {
queue[tail++] = i;
}
}
int visited = 0;
// 2. BFS,找到入度为0的节点,然后出队列,更新入度,继续找入度为0的节点
while (head < tail) {
++visited;
int u = queue[head++];
for (int i = 0; i < edgeColSize[u]; ++i) {
--indeg[edges[u][i]]; // 每次入度减一
if (indeg[edges[u][i]] == 0) {
queue[tail++] = edges[u][i];
}
}
}
for (int i = 0; i < numCourses; i++) {
free(edges[i]);
}
free(edges);
return visited == numCourses;
}
int main()
{
// 提供了图的邻接表表示
int a[] = {0,1};
int b[] = {0,2};
int c[] = {1,3};
int d[] = {2,4};
int *prerequisites[] = {a,b,c,d};
int prerequisitesSize = 4; // 有多少条约束关系
int numCourses = 5; // 有多少个节点
int prerequisitesColSize;
bool ret = canFinish(numCourses, prerequisites, prerequisitesSize, &prerequisitesColSize);
return 0;
}
279. 完全平方数
给定正整数 n,找到若干个完全平方数(比如 1, 4, 9, 16, …)使得它们的和等于 n。你需要让组成和的完全平方数的个数最少。
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
// 队列 && BFS
struct Link
{
int data;
struct Link* next;
};
struct Queue
{
struct Link *front; // 队头删除
struct Link *rear; // 队尾新增
int size;
};
void QueueInit(struct Queue *queue)
{
queue->front = NULL;
queue->rear = NULL;
queue->size = 0;
}
int QueueEmpty(struct Queue *queue)
{
return (queue->size == 0);
}
void QueuePush(struct Queue *queue, const int data)
{
struct Link *node;
node = (struct Link *)malloc(sizeof(struct Link));
node->data = data;
node->next = NULL;
printf("push queue %d\n", data);
if (QueueEmpty(queue)) {
queue->front = node;
queue->rear = node;
} else {
queue->rear->next = node; // 往队尾增加一个元素
queue->rear = node; // 设置当前元素为队尾
}
++queue->size;
}
int QueuePop(struct Queue *queue, int *data)
{
if (QueueEmpty(queue)) {
return 0;
}
struct Link *tmp = queue->front; // 队列头删除节点
*data = queue->front->data;
queue->front = queue->front->next;
printf("pop queue %d\n", *data);
free(tmp);
--queue->size;
return 1;
}
void QueueDestroy(struct Queue* queue)
{
struct Link *tmp;
while(queue->front) {
tmp = queue->front;
queue->front = queue->front->next;
free(tmp);
}
}
#define LENGTH 10000
int numSquares(int n) {
int i, j,next = 0, curr = 0, size = 0, steps = 0, *visited;
int *data = NULL;
struct Queue *queue = NULL;
queue = (struct Queue *)malloc(sizeof(struct Queue)); // 为根节点分配空间
if (n == 0 || n == 1) {
return n;
}
QueueInit(queue);
visited = (int *)malloc(sizeof(int) * (LENGTH+1));
data = (int *)malloc(sizeof(int));
memset(visited, 0, sizeof(int)*(LENGTH+1));
QueuePush(queue, 0); // 根节点入队列,入队为队尾
visited[0] = 1; // 访问标记
// 顺序遍历每一行,所以当节点差出现 0 时,此时一定是最短的路径
while (!QueueEmpty(queue))
{
steps++;
size = queue->size;
printf("------------steps is %d------------\n", steps);
for (i = 0; i < size; i++) {
QueuePop(queue, data); // 队首元素出队
curr = *data; // 队首元素值
printf("------curr is %d------\n", curr);
for(j = 1; j*j <= n; j++) {
next = curr+j*j;
printf("next is %d\n", next);
if (next == n) {
printf("!! bingo !! next == %d\n", n);
return steps;
} if (next > n) {
break;
} if (visited[next]) {
continue;
}
visited[next] = 1;
QueuePush(queue, next); // 节点入队
}
}
}
QueueDestroy(queue);
return steps;
}
int main() {
printf("\nresult is %d\n",numSquares(10));
return 0;
}
解题思路::求解 10 的完全平方数为例,利用图的BFS遍历(之前我们学习过BFS是利用队列),即按层次进行遍历,遍历值不超过 n 的平方根(j*j < n),如下图所示,所以依次进队列的是 0,然后0出队列,进 1->4->9,出队列1,然后入队 2->5->10,10 满足题意退出(图中多画了10 右面的情况是为了说明,如果出现之前出现过的值,则直接返回结果,这一小技巧,避免BFS遍历已访问的元素,如下图中黑色的点)

如果借助打印,结果将如下所示:

797. 所有可能的路径
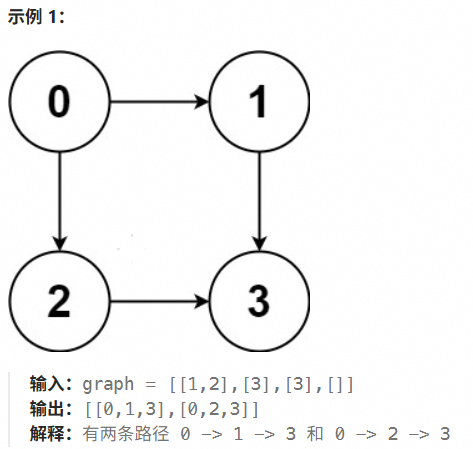
给你一个有 n 个节点的 有向无环图(DAG),请你找出从节点 0 到节点 n-1 的所有路径并输出(不要求按特定顺序)
graph[i] 是一个从节点 i 可以访问的所有节点的列表(即从节点 i 到节点 graph[i][j]存在一条有向边)。
int **ans;
int stack[15]; // 存储路径
int top;
void dfs(int x, int n, int **graph, int *graphColSize, int *returnSize, int **returnColumnSizes)
{
if (x == n) {
int *tmp = (int *)malloc(sizeof(int) * top);
memcpy(tmp, stack, sizeof(int) * top);
ans[*returnSize] = tmp;
(*returnColumnSizes)[(*returnSize)++] = top;
return;
}
// 邻接表表示的元素
for (int i = 0; i < graphColSize[x]; i++) {
int nextNode = graph[x][i];
stack[top++] = nextNode;
dfs(nextNode, n, graph, graphColSize, returnSize, returnColumnSizes);
top--;
}
}
int **allPathsSourceTarget(int **graph, int graphSize, int *graphColSize, int *returnSize, int **returnColumnSizes)
{
top = 0;
stack[top++] = 0;
ans = (int **)malloc(sizeof(int *) * pow(2,15));
*returnSize = 0;
*returnColumnSizes = malloc(sizeof(int) * pow(2,15));
dfs(0, graphSize - 1, graph, graphColSize, returnSize, returnColumnSizes);
return ans;
}
int main()
{
// 提供了图的邻接表表示
int a[] = {1,2};
int b[] = {3,};
int c[] = {3};
int d[] = {};
int *graph[] = {a,b,c,d};
int returnSize = 0;
int **returnColumnSizes = (int **)malloc(sizeof(int *) * pow(2,15));
int graphColSize[] = {2,1,1,0};
int graphSize = sizeof(graph) / sizeof(graph[0]);
int **res = allPathsSourceTarget(graph, graphSize, graphColSize, &returnSize,returnColumnSizes);
for(int i = 0; i < returnSize; i++){
for(int j = 0; j < (*returnColumnSizes)[i]; j++){
printf("%5d", res[i][j]);
}
printf("\n");
}
return 0;
}

















 2551
2551




 到【灌水乐园】发言
到【灌水乐园】发言







