



随着人形机器人从行走、搬运走向更复杂的服务与协作场景,其末端执行器——灵巧手的智能化水平,正成为衡量机器人实用能力的重要标尺。特斯拉Optimus在进博会上展示的抓取与操作能力,以及多家机器人公司在精细任务上的持续突破,都昭示着一个趋势:机器人正从“能动”走向“善操作”,而灵巧手正是实现这一跨越的核心部件。然而,如何让机械手像人手一样灵活、自适应地完成复杂任务,仍是行业面临的共性挑战。
像人手拿水杯、整理物品、裁剪枝叶等动作看似简单,但对机器人灵巧手来说却是高难度挑战。传统编程方式难以覆盖真实场景中物体的多样性、抓握力度的微妙变化与手眼协调的复杂性。而动作捕捉技术为解决这一难题提供了高效路径,通过精准捕捉人手在真实环境中的动作细节,动捕手套可将人类的“手感”转化为机器可学习的数据,为灵巧手训练提供高质量、多样化的示范样本,从根本上提升其操作的拟人化与智能水平。
作为在动作捕捉领域深耕多年的技术型企业,推出的mHand Pro动作捕捉手套,正是为具身智能灵巧手训练量身打造的高精度数据采集工具。该手套具备高灵敏度传感器、低延迟传输、全手指覆盖等特点,可精准捕捉每根手指的弯曲、伸展、并拢、抓握等细微动作,为灵巧手训练提供前所未有的数据粒度与真实性。
一、灵巧手遥操作:实时复刻人手动作,构建高质量真机数据集
通过穿戴mHand Pro动捕手套,训练师可直接控制灵巧手实体,在真实物理环境中执行抓取、放置、旋转等操作。这一“人手即控”的遥操作模式,不仅能实时复刻人类手部动作,更能在与真实物体交互中采集到连续、多维的“一手真实数据”。这些数据直接反映力度变化、触感反馈与适应性调整,极大提升了数据集的场景真实性与训练效率,缩短开发周期。

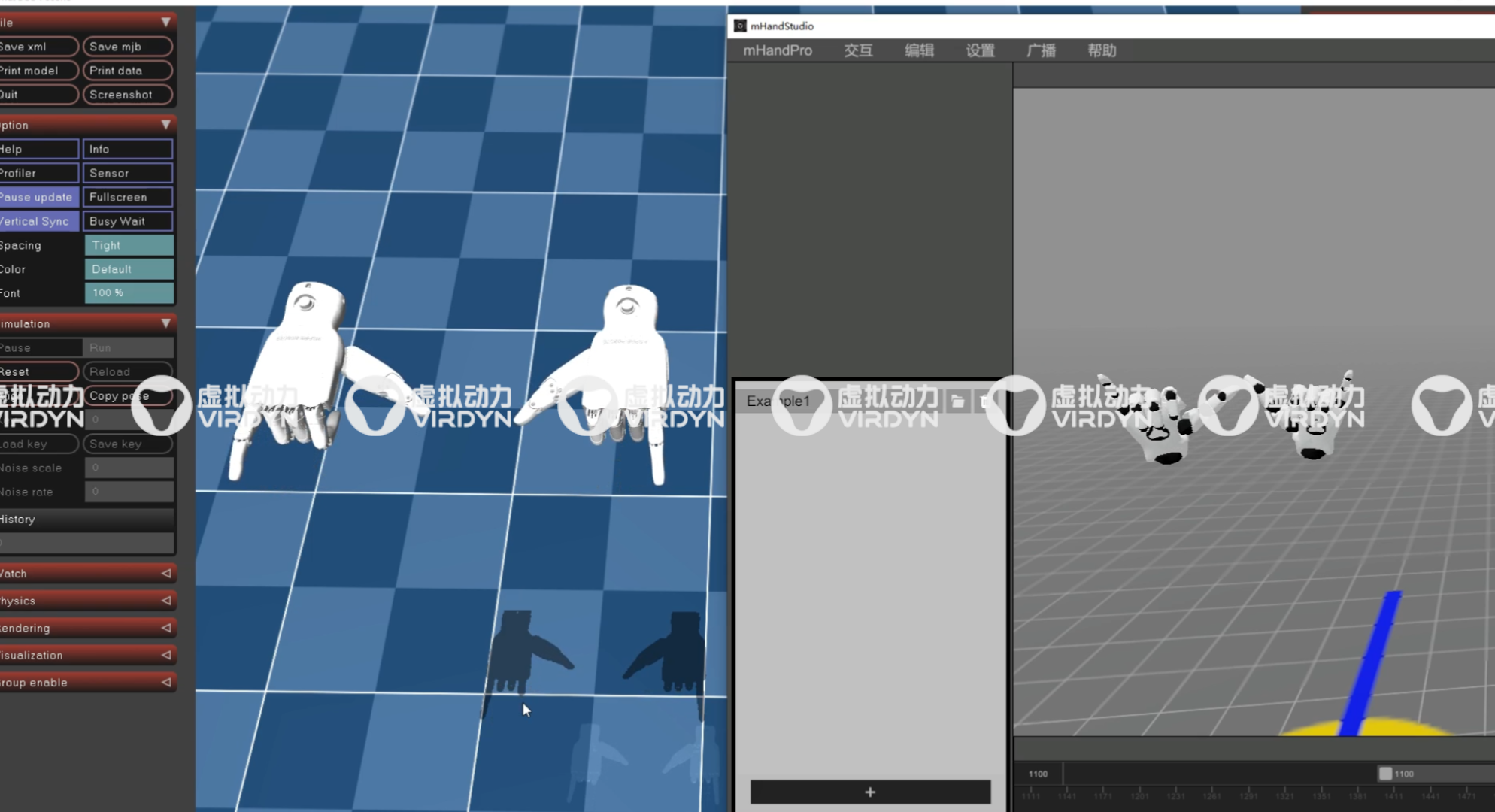
二、虚拟仿真平台映射:低成本、高效率的仿真训练闭环
mHand Pro手套已打通从真人手部动作到仿真平台中灵巧手模型的实时映射路径。训练师穿戴手套即可在MuJoCo、Isaac Sim等主流仿真环境中直接驱动虚拟灵巧手,进行动作验证、任务演练与数据采集。这一方式有效避免了实机训练中的硬件磨损与时间成本,支持在虚拟环境中批量生成低“具身差距”的仿真数据,为强化学习与算法迭代提供安全、高效的训练基础。
灵巧手的精细化操作能力是机器人融入人类生活与工作的关键。mHand Pro动捕手套,通过遥操作与仿真映射双路径,为灵巧手训练提供从真实交互到虚拟验证的全链路数据支持。这不仅提升了训练效率与动作拟人度,更推动了机器人从“执行命令”向“理解任务”的智能演进,为人机协作的未来奠定数据基石。

















 568
568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









