



随着人形机器人从实验室走向商业落地,其动作的流畅度与拟人化程度已成为衡量技术成熟度的关键指标。从工业装配到服务接待,从舞台表演到家庭陪伴,机器人正逐步融入人类生活的多个场景。然而,实现高度拟人的动作表现,离不开一个核心要素:高质量、多样化的动作数据。数据,已成为机器人行为智能发展的“新燃料”。
如何高效、精准地获取这些数据,并将其转化为机器人可学习、可执行的动作指令?人体动作捕捉技术,正是实现这一目标的关键路径。
人体动作数据采集,不仅能够还原真实人类的运动细节,更能覆盖从日常交互到高难度表演的广泛场景,为机器人提供丰富、自然、符合人体工学的动作样本。相比传统遥操作或手工编程,动捕数据具备高还原度、高效率、低成本三大优势,极大缩短了机器人动作开发周期。
采集流程简述:
1. 真人穿戴高精度动作捕捉设
专业动捕演员穿戴惯性设备,完成目标动作的精准录制。设备可捕捉全身关节的细微运动,包括手势、步态、姿态等,确保数据源的真实性与完整性。
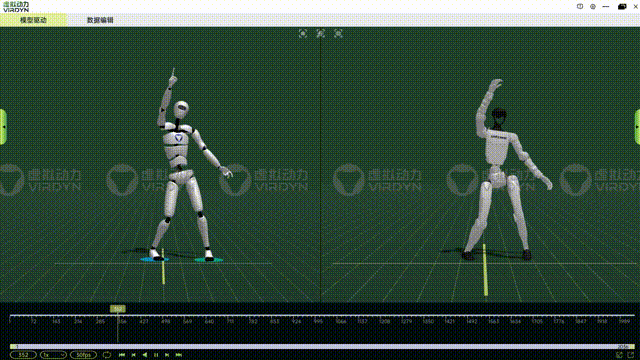
2. 动捕数据清洗与重定向映射
原始数据经过专业软件清洗、去噪、修复与格式统一,剔除无效信息并修复动作断层。随后,通过重定向技术将人体动作数据映射至机器人模型,实现“从人到机”的无损转换。
3. 机器人强化学习训练或二次精修
处理后的数据可直接用于机器人强化学习训练,用户也可基于生成的数据进行二次开发,进一步调整动作细节,适配特定场景需求。

数据,是机器人行为智能的基石。具身智能人体数据采集方案,正是为了打通“从人到机”的数据闭环,让机器人不再只是执行指令的机械体,而是具备自然表达与智能交互能力的“数字生命体”。未来,我们将持续优化数据采集与处理流程,助力机器人在更多场景中实现拟人化突破,推动具身智能迈向更广阔的未来。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









