







打算把研究方向转为路径规划,最近要努力去学了。好像大家推荐深蓝学院高飞等老师的《移动机器人运动规划》最多,于是先从这个学起。
双系统是Windows11+Ubuntu18,由于蓝牙模块一直没安好,所以先用虚拟机中的Ubuntu20.04进行学习,方便一边听课一边调试。由于作业的源码是在kinetic也就是Ubuntu16下进行编写调试的,因此Ubuntu20.04无法直接编译成功。所以打算做个学习记录~(当我写到前几行的时候,师兄凑过来看,问了我一个灵魂问题:为啥不在虚拟机里装个kinetic或者melodic(沉默是今晚的康桥...(在装了在装了
总而言之先记录下吧!
1、安装PCL库
sudo apt update
sudo apt install libpcl-dev注意要安装转换头文件pcl_conversions
sudo apt update
sudo apt install libpcl-conversions-dev2、解决PCL报错:PCL requires C++14 or above
在grid_path_searcher和waypoint_generator功能包的CMakeLists.txt中加上这样一行语句:
ADD_COMPILE_OPTIONS(-std=c++14 )然后就大功告成可以编译了!
3、要注意的细节:在roscore后打开rviz,rviz最好在工作空间打开,打开前要source devel/setup.bash(因为这个工程使用了rviz功能包)
4、但是虚拟机的性能还是太差了,rviz经常卡顿
有博主说可以关闭造成问题的硬件加速,但虚拟机好像没用。
export LIBGL_ALWAYS_SOFTWARE=1
5、rviz不显示地图
这个是真的很懵逼,在csdn上查了发现有两种解决方案:(我猜是跟全局、相对、私有有关)
方案1:
在demo.rviz找到Fixed Frame: world在world前加//
方案2:
在demo_node.cpp中找到/world,把它改成world
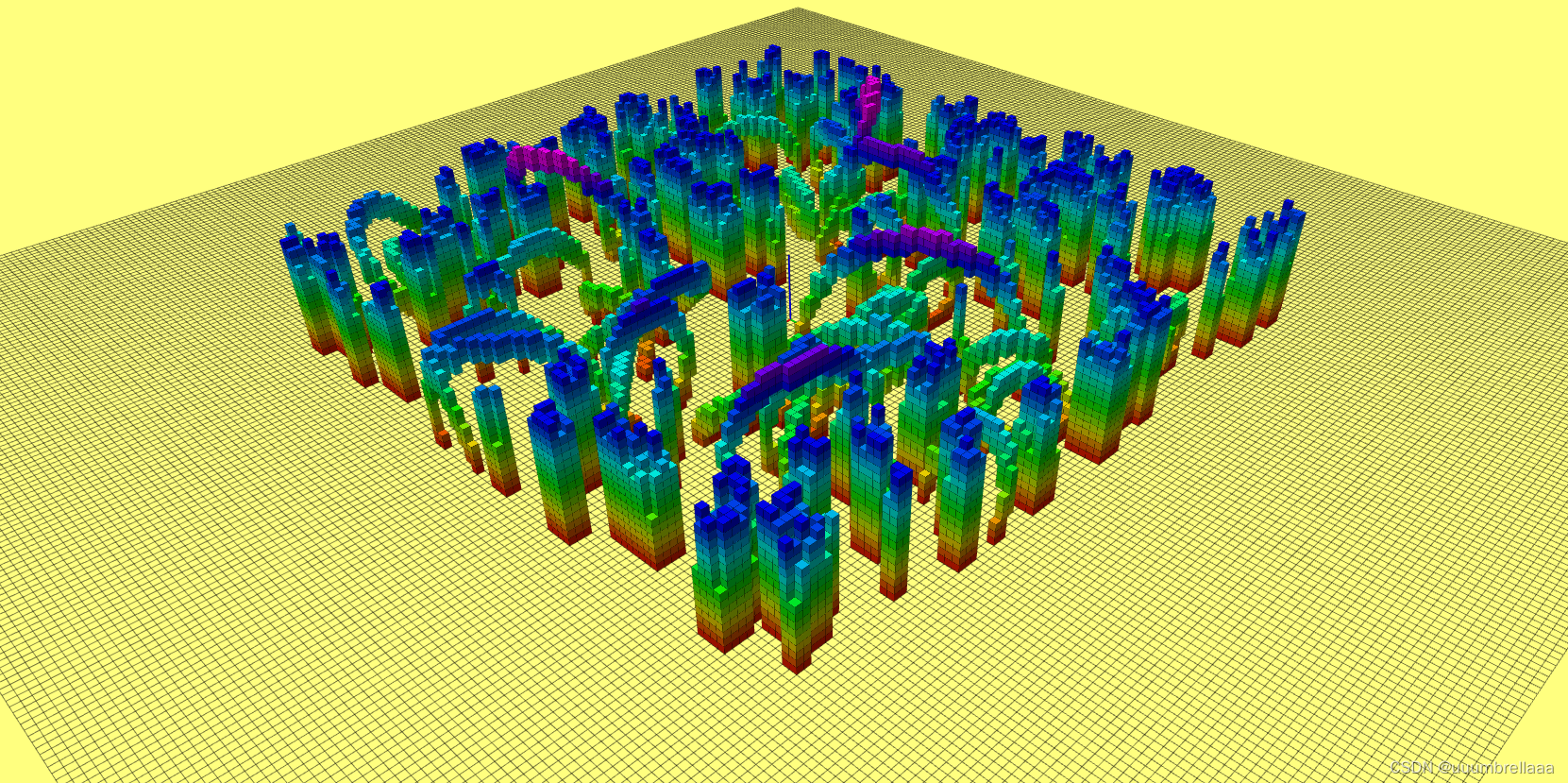
终于出现了5555

















 1701
1701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









