




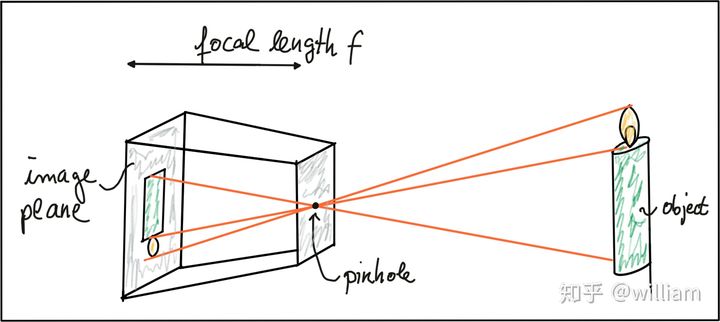
1. 相机坐标系->图像坐标系 (米 -> 米)
f为相机焦距

此时投影点p的单位还是m,并不是pixel,需要进一步转换到像素坐标系
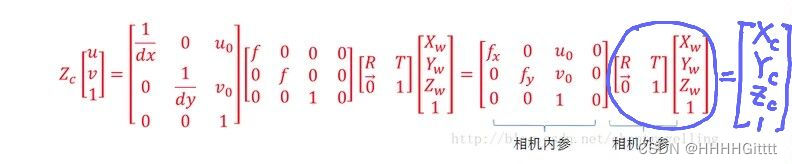
2. 图像坐标系->像素坐标系 (米 -> 像素)

3. 相机坐标系->像素坐标系 (米 -> 像素)
由12得知,像素坐标(u,v) 由相机内参和相机坐标得出。
 文章详细阐述了从相机坐标系到图像坐标系,再到像素坐标系的转换过程,涉及相机焦距和内参的作用。同时,重点解析了KITTICALIB的标定校准文件,对3D目标检测数据集的理解提供了帮助。
文章详细阐述了从相机坐标系到图像坐标系,再到像素坐标系的转换过程,涉及相机焦距和内参的作用。同时,重点解析了KITTICALIB的标定校准文件,对3D目标检测数据集的理解提供了帮助。
f为相机焦距
由12得知,像素坐标(u,v) 由相机内参和相机坐标得出。
 1967
4529
6039
1967
4529
6039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























