




 本文探讨了卡通渲染中的光照计算方法,包括减少色阶、冷暖色调分离、手绘控制和Ramp贴图的应用,以实现赛璐璐和厚涂风格的卡通效果。着重介绍了《GUILTYGEARXrd》中的ilmTexture和相关技术细节。
本文探讨了卡通渲染中的光照计算方法,包括减少色阶、冷暖色调分离、手绘控制和Ramp贴图的应用,以实现赛璐璐和厚涂风格的卡通效果。着重介绍了《GUILTYGEARXrd》中的ilmTexture和相关技术细节。
序言:
接上一篇的描边篇,整理成一个专栏了。在本节中,我们开始讨论卡通渲染的一些光照计算方法。
如何让角色看起来卡通
思考一下,究竟是哪些因素,让我们觉得角色是卡通的呢。我觉得可以先从下面3点入手
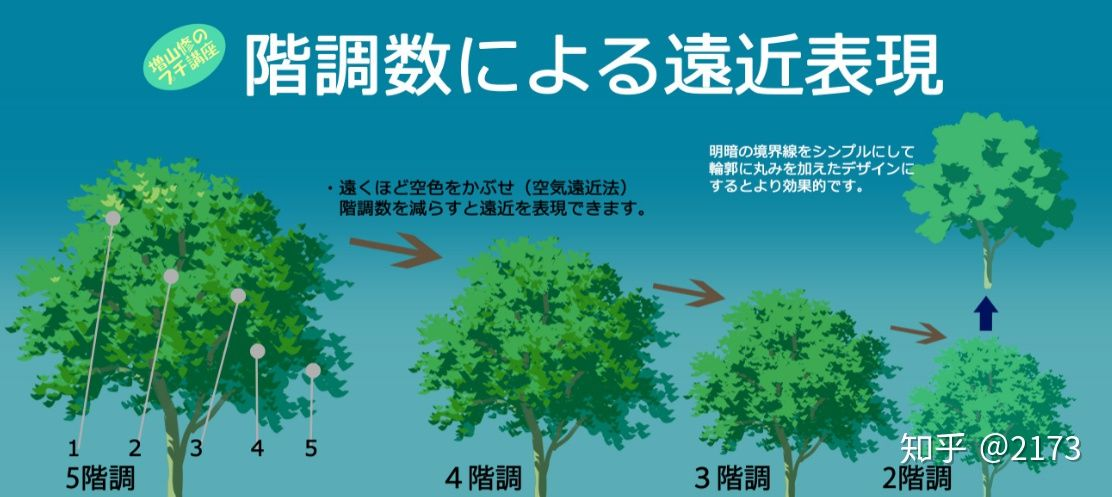
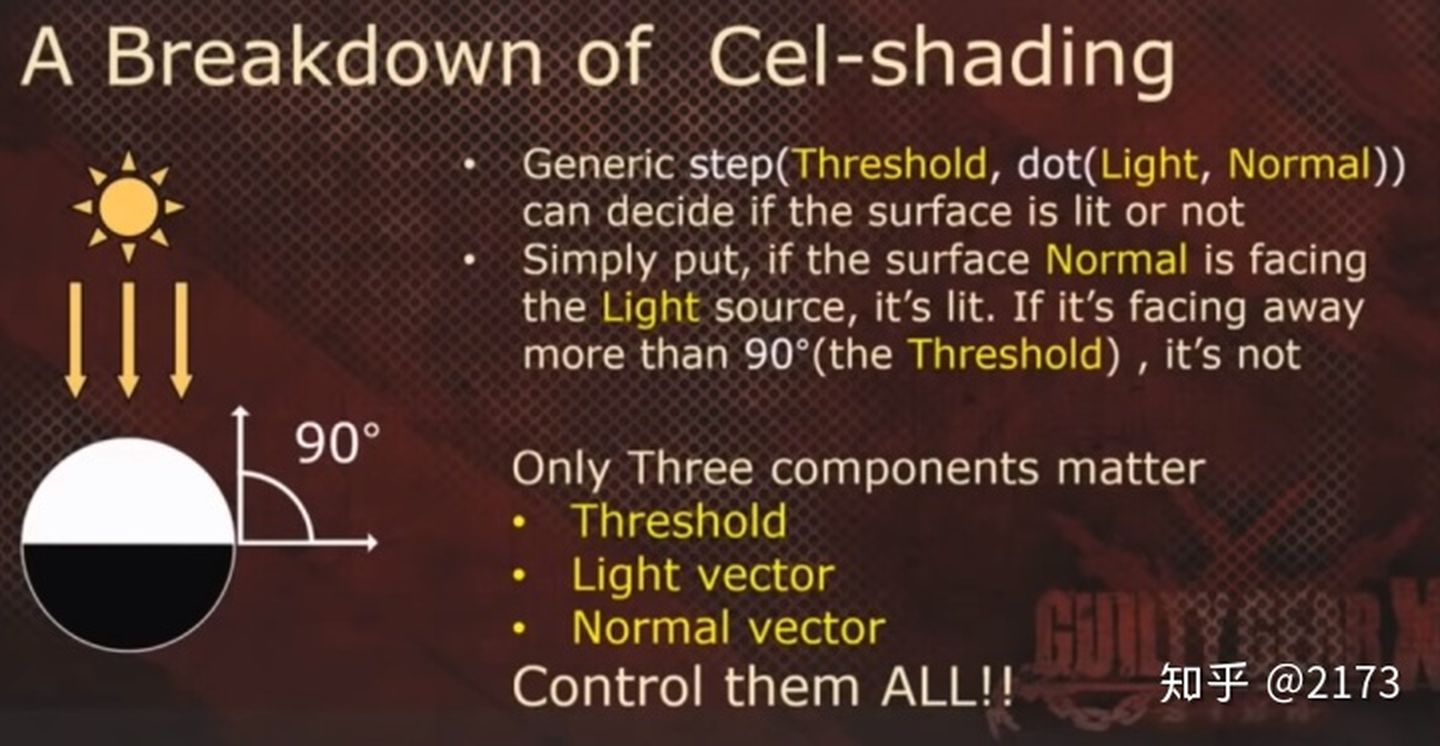
1.减少色阶数量
2.冷暖色调分离
3.对明暗区域的手绘控制
减少色阶数量
冷暖色调分离
在美术上根据颜色区分为暖色调(红色,黄色)和冷色调(蓝色、紫色)。在偏真实的光照计算中,往往只计算一个明暗关系,然后由光和物体的颜色决定最终效果。而卡通渲染则会根据明暗关系,为明面和暗面分配不同色调的颜色。比如一个暖色调的明面,配合一个冷色调的暗面。将色调拉开以后,更进一步给人卡通感。相关链接
tone-based-shadin
在《GUILTY GEAR Xrd》游戏中,绘制了一张称为SSS Texture的贴图,来对暗面的色调进行调整。
对明暗区域的手绘控制
在手绘动画中为了好的画面效果,往往其明暗的分布并不是完全正确的。最明显的,角色的脖子部分通常都出现明显的阴影。经典光照计算的结果是非常“正确”的,因而缺少卡通的手绘感。需要用其他方式对光照的计算结果进行调整。 下面介绍一下《GUILTY GEAR Xrd》中是如何对明暗区域进行手绘控制的

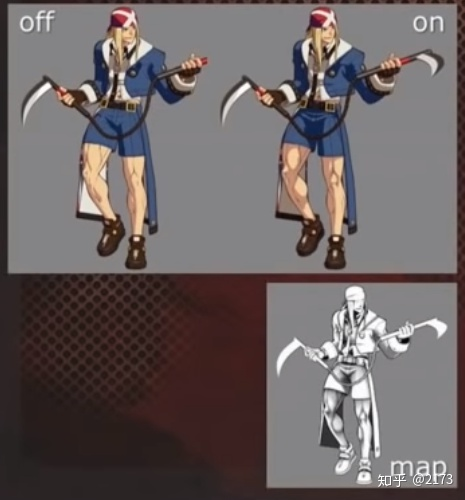
灯光方向控制:
卡通渲染的角色在部分灯光方向下,可以有最佳的画面表现。有时候这个灯光方向和场景灯光或者其他角色的灯光方向不一致。为了让每个角色都有最佳表现,最好每个角色有一盏自己的灯光方向。甚至当这个角色转向时,这个灯光也跟着角色做一定程度的转向,来让角色有一个更好的光影表现。
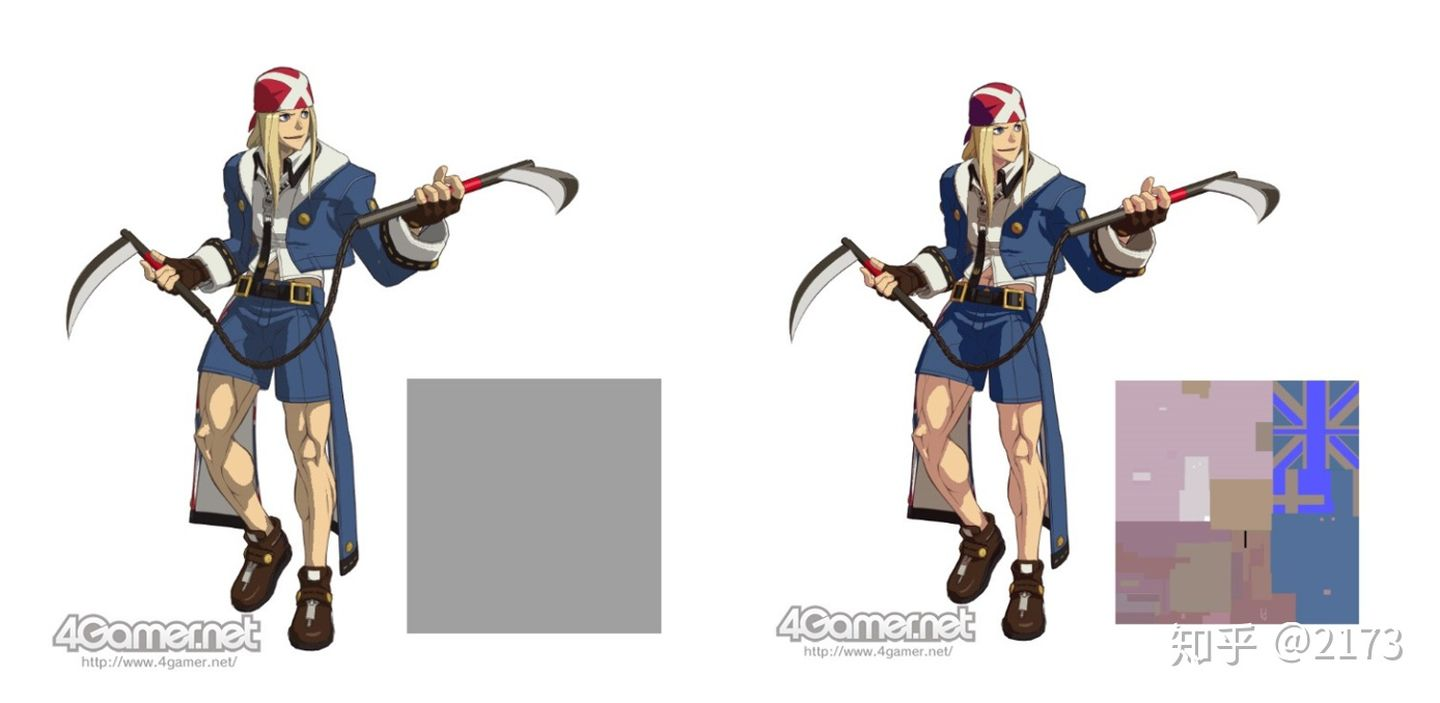
Threshold贴图控制:
《GUILTY GEAR Xrd》中将这张贴图称作ilmTexture。为了减少歧义,我们这里也这么称呼好了。
这张贴图有些类似于AO贴图,不过它是对光照计算的结果进行一些倾向性的修正。让一部分区域,比如角色脖子的部分更容易产生阴影。来达到手绘风格的阴影效果。
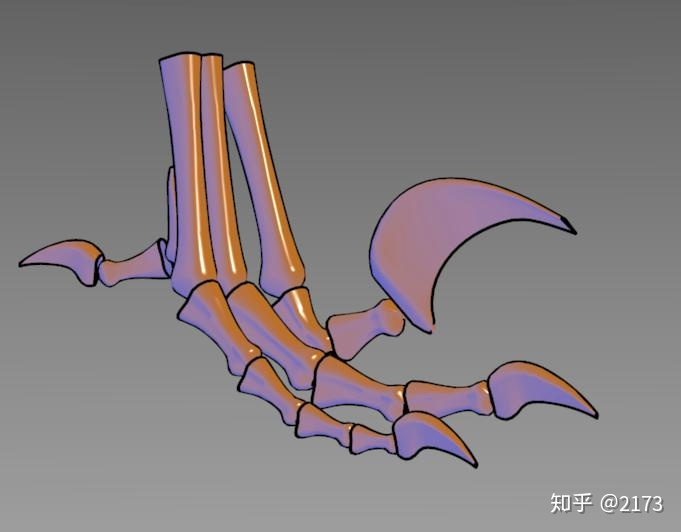
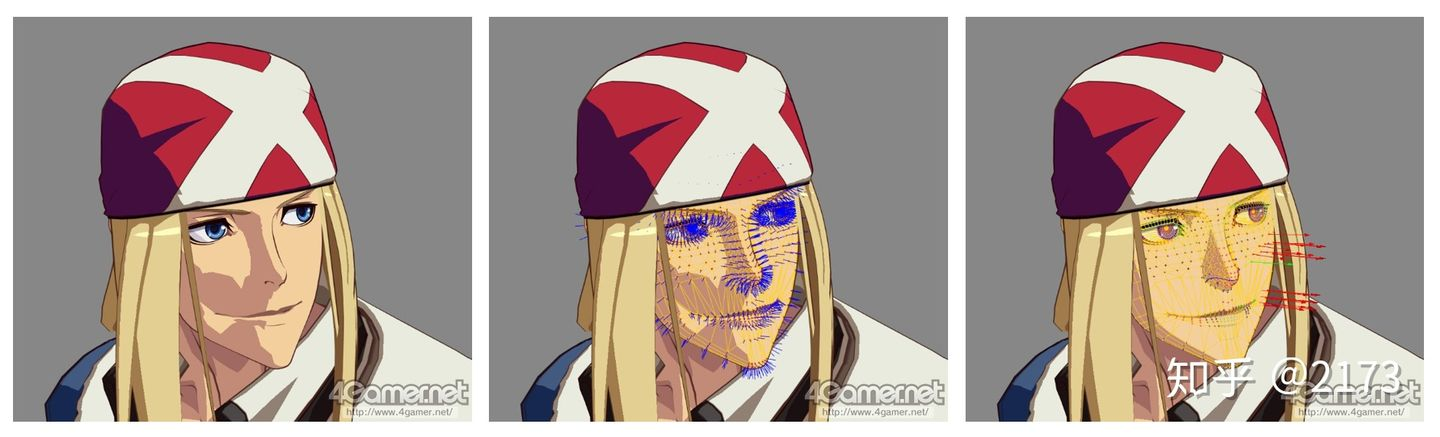
法线方向控制:
法线控制有两种方法,一种是直接编辑法线,达到想要的光照结果。一种是创建一个平滑的简单模型,然后将其法线传递到复杂物体上,达到优化阴影的效果。Maya自带法线传递的功能,3ds Max可以通过插件
Noors Normal Thief 实现法线传递的功能。

赛璐璐风格插画
赛璐璐片是一种塑料卡片,在早期日本动画制作流程中的,画师会在赛璐璐材质的塑料卡片上对原画进行上色。其特点为通常只有明暗2个色阶,明暗变化的交界非常明显。现在这种风格的卡通渲染比较流行。在本篇中,也将实现偏向这种风格的卡通渲染。
厚涂风格插画
厚涂风格相较赛璐璐风格,色阶更多,明暗交界变化会柔和很多。这个风格也有它的好处,因为3D场景比较难做成赛璐璐的。如何让赛璐璐风格的角色和非赛璐璐的场景融合是也许需要考虑的。厚涂风格的角色会更容易和场景进行融合。

双色阶的渲染实现
首先我们实现一个明暗边界分明的光照效果,并支持分别设置明暗区域的颜色,设置暗面颜色为冷色调,和明面的色调做出区分。
Shader
"Unlit/CelRender"
{
Properties
{
_MainTex
(
"MainTex"
,
2D
)
=
"white"
{
}
_MainColor
(
"Main Color"
,
Color
)
=
(
1
,
1
,
1
)
_ShadowColor
(
"Shadow Color"
,
Color
)
=
(
0
.
7
,
0
.
7
,
0
.
8
)
_ShadowRange
(
"Shadow Range"
,
Range
(
0
,
1
)
)
=
0.5
_ShadowSmooth
(
"Shadow Smooth"
,
Range
(
0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4628
4628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









