




开发实验室显微镜自动化控制上位机系统需要综合考虑硬件控制、软件架构、用户交互和自动化流程设计。
一、需求分析与系统架构设计
-
核心需求确认
-
控制对象:电动载物台(XYZ轴)、物镜切换器、摄像头、LED/激光光源、滤光片轮。
-
自动化功能:自动对焦、多区域扫描、时间序列成像、Z-stack层扫、图像实时处理。
-
用户场景:病理切片分析、活细胞观测、材料科学显微成像。
-
-
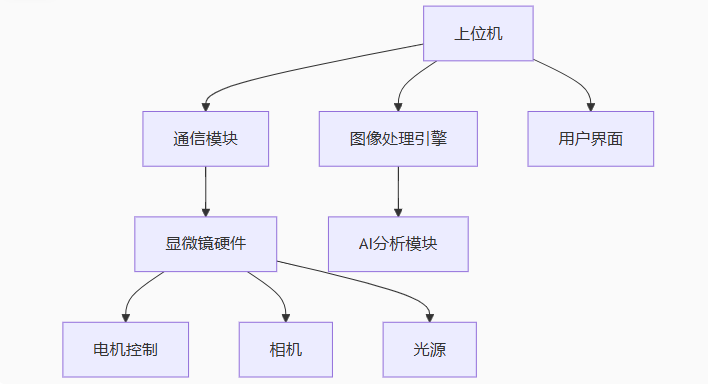
系统架构
二、硬件集成与通信协议
-
硬件选型
-
运动控制:PI公司的高精度压电载物台(纳米级定位)或Thorlabs步进电机系统。
-
相机:FLIR Blackfly S USB3.0相机(支持SDK开发)或Basler ace系列。
-
光源:CoolLED pE-300系列(多波长可控荧光光源)。
-
-
通信方案
-
底层协议:
-
载物台控制:SCPI命令(通过RS-232或TCP/IP)
-
相机:GenICam标准(兼容GigE Vision/USB3 Vision)
-
光源:Modbus TCP
-
-
中间件:使用NI-VISA或COM组件统一封装硬件接口。
-
三、软件开发关键技术
-
技术栈选择
-
核心框架:C# WPF(硬件交互+UI) + Python(图像处理/AI)
-
图像库:OpenCV(实时处理)、ImageJ集成(高级分析)
-
通信层:ZeroMQ(跨进程通信)+ OPC UA(工业设备互联)
-
-
核心模块实现
-
自动对焦算法:
python
复制
下载
# 基于Tenengrad梯度的清晰度评价 def focus_score(img): gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) gx = cv2.Sobel(gray, cv2.CV_64F, 1, 0) gy = cv2.Sobel(gray, cv2.CV_64F, 0, 1) return np.mean(gx**2 + gy**2) # 爬山搜索算法 def auto_focus(): best_pos, best_score = current_z, 0 for z in scan_range: move_stage(z) img = camera.capture() score = focus_score(img) if score > best_score: best_score = score best_pos = z return best_pos -
多线程架构:
-
主线程:UI响应
-
Worker线程1:硬件控制(实时性要求高)
-
Worker线程2:图像处理流水线
-
Worker线程3:数据存储(TIFF序列+元数据)
-
-
四、用户界面设计要点
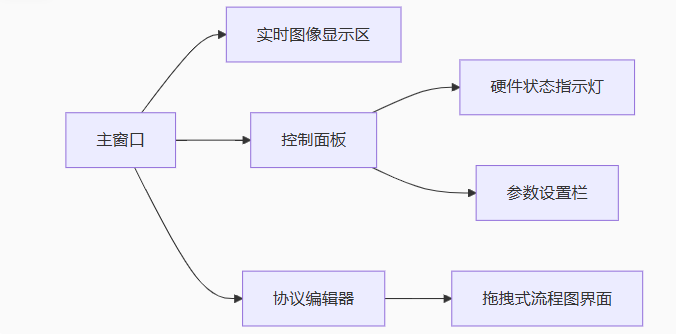
布局方案
-
关键交互
-
实验协议配置:支持JSON/YAML格式的脚本导入导出
-
紧急停止:硬件级急停按钮+软件安全限位
-
多语言支持:使用resx资源文件实现中英文切换
-
五、测试与部署
-
验证方案
-
单元测试:使用NUnit测试电机单轴运动精度
-
集成测试:全自动多天连续运行测试(模拟实际实验室环境)
-
性能指标:
-
图像采集延迟:<100ms(1080p@30fps)
-
定位精度:±0.5μm(闭环控制模式下)
-
-
-
部署包制作
-
使用Inno Setup制作安装程序
-
依赖项自动安装(.NET Runtime、VC++ Redist等)
-
硬件驱动静默安装(通过INF文件)
-
六、扩展功能开发路线
-
AI集成
-
部署ONNX格式的细胞检测模型(YOLOv8)
-
主动学习框架:用户标注错误样本自动反馈到模型训练
-
-
云端功能
-
通过MQTT上传数据到实验室私有云
-
Web界面远程监控(采用SignalR实时通信)
-
七、典型问题解决方案

通过以上架构设计和技术选型,可在6-8个月内完成可投入实际使用的系统开发。建议采用迭代开发模式,优先实现核心的自动扫描+图像采集功能,再逐步扩展高级分析模块。


















 1113
1113

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









