




开发游泳池清洗机器人上位机控制程序需要结合水下机器人特性、清洁算法和用户交互需求。
一、核心需求与系统架构
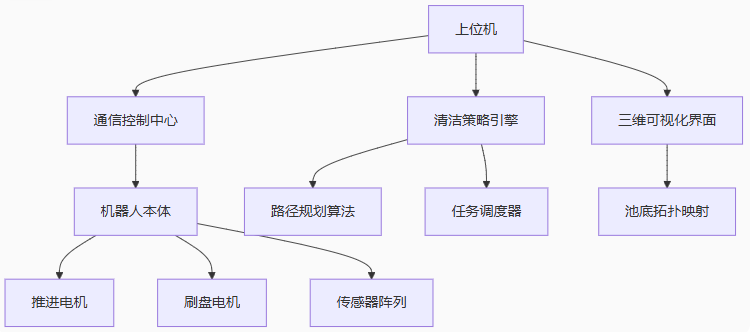
核心功能模块
-
运动控制
-
多推进器协同控制(PID调节)
-
防缠绕算法(螺旋推进策略)
-
-
清洁管理
-
自适应刷压控制(基于池底材质检测)
-
垃圾回收率统计(通过流量传感器)
-
-
智能导航
-
SLAM建图(融合IMU+声呐数据)
-
动态避障(毫米波雷达+摄像头)
-
-
能源系统
-
智能充电导航(RFID信标定位)
-
功耗优化策略(任务分段执行)
-
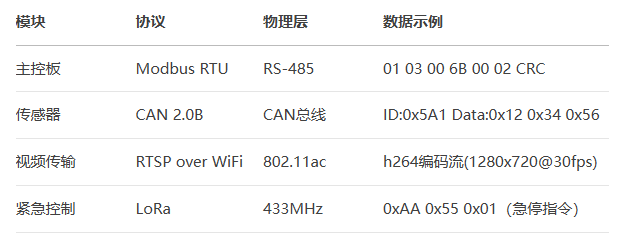
二、硬件接口设计
通信协议栈
关键传感器配置
-
水压传感器:监测过滤网堵塞(量程0-2bar)
-
电子罗盘:航向校准(精度±0.5°)
-
漏电检测:绝缘电阻监测(阈值>1MΩ)
-
水质检测:pH值+余氯传感器(I2C接口)
三、控制算法实现
路径规划核心代码
python
复制
下载
# 基于改进A*算法的三维路径规划
def underwater_astar(start, end):
open_set = PriorityQueue()
open_set.put((0, start))
came_from = {}
g_score = {point: float('inf') for point in grid}
g_score[start] = 0
while not open_set.empty():
current = open_set.get()[1]
if current == end:
return reconstruct_path(came_from, end)
for neighbor in get_neighbors(current):
# 考虑水流影响成本计算
tentative_g = g_score[current] + movement_cost(current, neighbor)
+ current_flow_impact(current, neighbor)
if tentative_g < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g
f_score = tentative_g + heuristic(neighbor, end)
open_set.put((f_score, neighbor))
return None
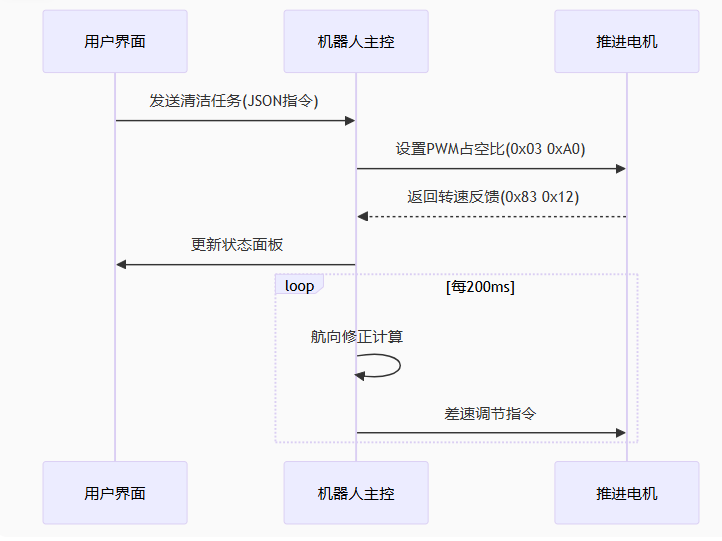
控制指令时序设计
四、软件开发框架
技术栈组合

多线程架构
cpp
复制
下载
// QThread 任务分配示例
class Controller : public QObject {
Q_OBJECT
public slots:
void run() {
QThread* commThread = new QThread;
SerialHandler* handler = new SerialHandler();
handler->moveToThread(commThread);
connect(commThread, &QThread::started, handler, &SerialHandler::initPort);
connect(handler, &SerialHandler::dataReceived, this, &Controller::processData);
commThread->start();
}
}
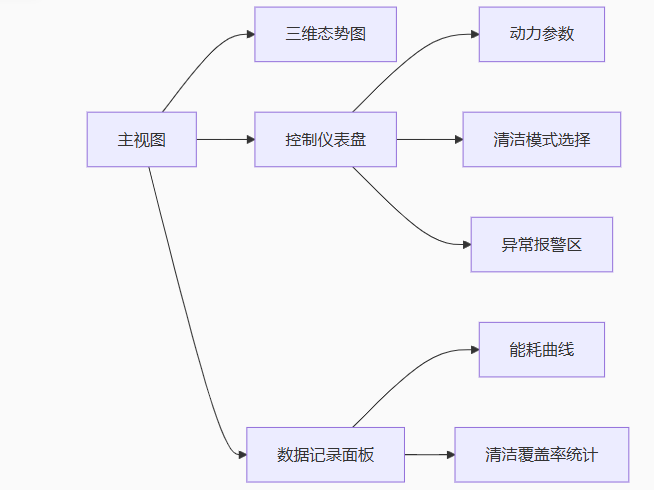
五、用户界面设计
控制面板布局
关键交互特性
-
手势控制:支持触屏划动指定清洁区域
-
语音控制:集成Vosk语音识别引擎(离线指令集)
-
增强现实:通过手机APP显示水下机器人实时位置
-
智能诊断:故障树分析界面(引导式排错流程)
六、特殊问题处理方案
水下通信补偿
python
复制
下载
# 自适应码率调整算法
def adjust_bitrate(rssi, snr, current_rate):
if rssi < -80 or snr < 5:
return max(250kbps, current_rate*0.5)
elif packet_loss > 0.1:
return current_rate * (1 - packet_loss)
else:
return min(2Mbps, current_rate*1.1)
安全保护机制
-
应急上浮:独立气压罐触发机构(与主控物理隔离)
-
绞盘回收:GPS失联后自动收紧安全绳
-
漏电保护:双重绝缘监测(接触电流<1mA)
七、测试验证方法
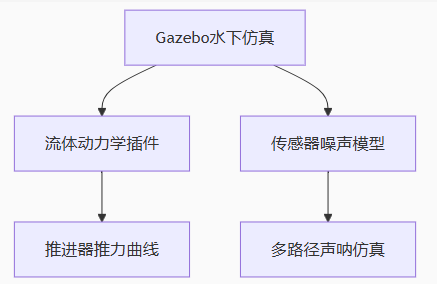
仿真测试环境
现场测试指标

八、升级扩展方向
-
群体协作:多机器人协同清洁(基于拍卖算法任务分配)
-
预测维护:电机寿命预测(LSTM振动分析)
-
太阳能扩展:水面光伏充电模块(DC-DC电源管理)
-
虚拟训练:VR操作员培训系统(Unity3D开发)

















 888
888

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









