




得益于芯片制程的提高和IC设计的发展, 目前基于单片机实现的高精度的步进电机控制技术来实现的桌面级高精度的 3轴运动控制功能日益成熟, 今天就简单介绍一下基于stm32F4系列芯片以及TMC2209的步进电机控制的基本原理及基础运动控制.
步进电机: 市面上应用较广, 较为成熟,且应用广泛的两相42步进电机作为测试设备, 步进角是1.8°, 基础模式下有全步或者半步1.8°或者0.9°, 供电电压一般以12V居多, 大部分是开环控制, 也有部分步进电机集成了霍尔(电磁感应)编码器或者光电编码器, 通过1反馈电机主轴的转动信号来实现对步进电机的闭环控制, 可以在一定程度上解决丢步的问题.
驱动芯片:目前桌面级电机驱动比较常见的是 A4988或者TMC2209这类驱动模块, 两者都可以对两项小功率步进电机进行精准的转动控制, 可以简单理解为前者是基础款驱动, 后者为升级款驱动, 后者在精度, 噪音, 发热, 功能扩展 等方面都要优于前者, 当然价格也贵一点, 可以根据需求自主选择合适的驱动芯片
主控板: stm32F4系列NCU采用的是crotx-M4的ARM内核, 有用168MHz的高主频, 可以将grbl这种执行g-code的arduino开源库移植到stm32F4上, 实机测试有很不错的控制效果. 且stm32F4引脚足够多, 对于限位, 温度传感器, 姿态传感器, 风扇等其他硬件有较强的扩展性
配置MCU:
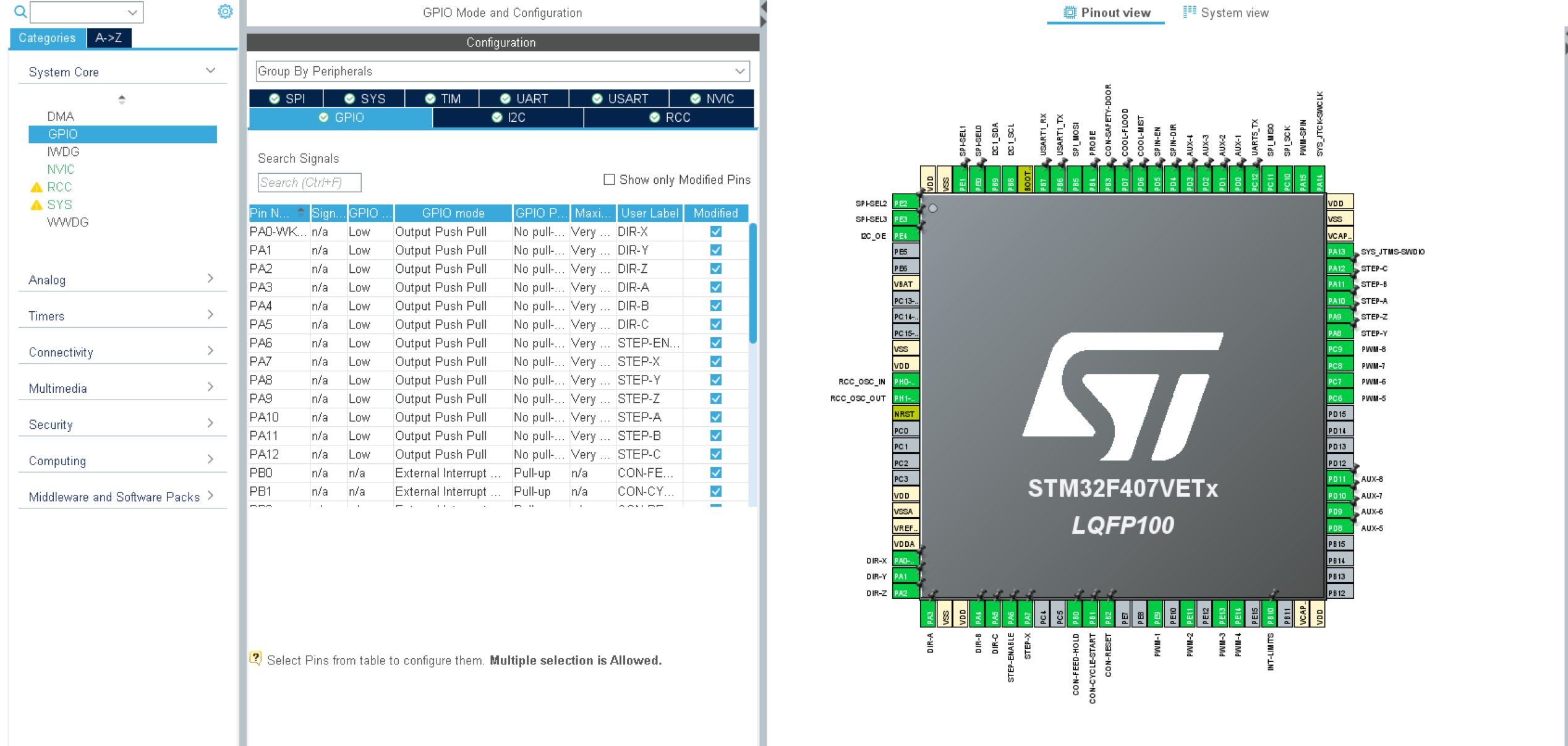
由上图的cubeIDE的配置图可以看到, 对于步进电机的驱动控制的基本管脚比较简单, 一个步进电机由一个电机驱动模块控制, MCU只需要有3个引脚连接驱动模块, 就可以控制一个步进电机, 分别是: enb/dir/stp 分别是使能引脚, 方向引脚, 脉冲引脚, 使能引脚拉低, 点击将上电并抱死处于"停止状态", 方向引脚拉高或者拉低将控制电机旋转方向的顺时针和逆时针, stp引脚则输出控制步进电机转动的脉冲信号, 全
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1901
1901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









