



既然学完动态规划了:01dp 多重dp
我们接着刷板子:最短路问题
最短路有很多种,这次我们先刷Bellmanford算法
先从图的存储方式说吧,以后每写一篇最短路就写一种存图的方式,这次是“链式前向星”
其实是一个很好理解的问题,因为一个节点指向其他节点的图长得就很像一个星星
话不多说,直接上我最开始学的代码,我认为可读性还是可以的
#include <iostream>
#include <vector>
using namespace std;
struct Edge{
int next,goal,value;//上一个的位置,下一个节点,权值
};
vector<Edge>edge;
int cnt=0;
vector<int>head;
void addEdge(int u,int v,int w)//添加边,u起点,v终点,w边权
{
edge[cnt].goal=v;
edge[cnt].value=w;
edge[cnt].next=head[u];//给定上一条边的编号(下标
head[u]=cnt++;//更新编号,并且使cnt增加
}
int main()
{
int n,m;cin>>n>>m;//n个节点,m条边
edge.resize(m);
head.assign(m,-1);//初始化,如果值为-1说明这是该节点的第一个输入的边
int u,v,w;
for(int i=0;i<m;i++)
{
cin>>u>>v>>w;
addEdge(u,v,w);
}
for(int i=1;i<=n;i++)//遍历输出,优先以每个节点开始
{
cout<<i<<endl;
for(int j=head[i];j!=-1;j=edge[j].next)
{
cout<<i<<" "<<edge[j].goal<<" "<<edge[j].value<<endl;
}
cout<<endl<<endl;
}
return 0;
}这个代码可以读入一张n个节点m条边的图,并且按照出发点将边存储进图,你可以自己进行尝试
addEdge:链式前向星的重要实现部分,每次函数调用都会将数据存入结构体数组,并且将edge[i].next更新为上一个起始边为i的下标,应该是不难理解的,对吧(
如果看懂了,那我们开始简化这个代码,直接将addEdge函数放进main函数的读入中
ll next;
for(int i=0;i<m;i++)
{
cin>>next>>edge[i].goal>>edge[i].value;
edge[i].next=head[next];
head[next]=i;
}对于存图的内容我们基本就理解到位了,接下来开始寻路的内容(敲黑板
寻路的部分非常简单,就是对每条边进行贪心比如说现在有如下数据
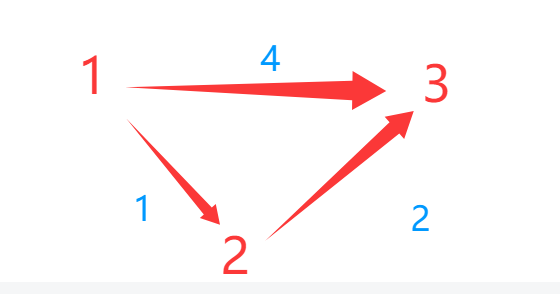
则我们可以进行一次贪心操作(也被称作松弛操作)
也就是的这条路比1-->3更短,所以我们直接记录1到3的最短路径为1-->2-->3,也就是长度由4变为3,于是我们新开一个数组,记录每个点到原点的距离,每次向外松弛一次,这个操作模式有点类似bfs
上代码
vector<ll>dist(n+1,INT_MAX);//记录原点到每个点距离,且初始到原点无限远
dist[1]=0;//起点到起点的距离为0
for(ll x=1;x<=k;x++)//松弛至多k次,通常情况下k=n-1
{
vector<ll> tempDist=dist;//为了不影响之前状态,防止出现错误,所以复制一份
for(ll i=1;i<=n;i++)
{
if(dist[i]==INT_MAX)continue;//经过X条边不能到达则跳过不必要循环
for(ll j=head[i];j!=-1;j=edge[j].next)
tempDist[edge[j].goal]=min(tempDist[edge[j].goal],dist[i]+edge[j].value);
//松弛操作
}
dist=tempDist;
}
if(dist[n]==INT_MAX)cout<<"impossible"<<endl;//不能经过k条路到达n
else cout<<dist[n]<<endl;每次松弛只向外松弛一层(多走过一条边),所以可以通过外层循环对于经过边的数量进行限制
内层循环就是链式前向星的遍历

















 861
861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









