import tensorflow as tf
from keras.layers import *
import keras.backend as K
from tensorflow.python.ops import control_flow_ops
from tensorflow.python.ops import tensor_array_ops
def cosine2(input_t, states):
'''
余弦相似度
:param q:
:param a:
:return:
'''
state_shape = K.int_shape(states)
shape_s = state_shape[-1]
batch_t = state_shape[0]
pooled_len_1 = tf.sqrt(tf.reduce_sum(tf.multiply(input_t , input_t),1))
pooled_len_1=tf.reshape(pooled_len_1, (batch_t, 1))
pooled_len_1 = tf.tile(pooled_len_1,[1,3])
pooled_len_2 = tf.sqrt(tf.reduce_sum(tf.multiply(states , states),2))
pooled_mul_12 = tf.matmul(states, tf.reshape(input_t, (-1, shape_s, 1)))
pooled_mul_12 = tf.transpose(pooled_mul_12, [2, 0, 1])
score = tf.div(pooled_mul_12,pooled_len_1*pooled_len_2)
score = tf.transpose(score, [1, 0, 2])
return score
def cosine22(input_t, states):
'''
余弦相似度 numpy
:param q:
:param a:
:return:
'''
state_shape =states.shape
shape_s = state_shape[-1]
# timestep = state_shape[1]
pooled_len_1 = np.sqrt(np.sum(np.multiply(input_t , input_t),1))
pooled_len_1=np.tile(np.reshape(pooled_len_1, (-1, 1)), 3)
pooled_len_2 = np.sqrt(np.sum(np.multiply(states , states),2))
pooled_mul_12 = np.matmul(states, np.reshape(input_t, (-1, shape_s, 1)))
pooled_mul_12=np.transpose(pooled_mul_12, [2, 0, 1])
score = np.divide(pooled_mul_12, pooled_len_1 * pooled_len_2)
# score= np.matmul(states, np.reshape(input_t, (-1, shape_s, 1)))
print(score)
score=np.transpose(score,[1,0,2])
print(score)
return score
inputs=tf.constant([[[1,2,3,4],[1,0,1,5],[0,1,7,1]],
[[1,8,1,0],[4,1,1,2],[0,5,1,2]]],dtype="float32")
state = tf.constant([[[1,0,1,1],[0,1,1,1],[0,2,1,1]],
[[1,0,1,1],[2,1,1,1],[2,0,1,1]]],dtype="float32")
def lala(inputs,state):
input_shape = K.int_shape(inputs)
input_length = input_shape[1]
ndim = len(inputs.get_shape())
axes = [1, 0] + list(range(2, ndim))
inputs = tf.transpose(inputs, (axes))
time_steps = tf.shape(inputs)[0]
print(inputs.shape)
print(state.shape)
output_ta = tensor_array_ops.TensorArray(
dtype=inputs.dtype,
size=time_steps,
tensor_array_name='output_ta')
input_ta = tensor_array_ops.TensorArray(
dtype=inputs.dtype,
size=time_steps,
tensor_array_name='input_ta')
cosin_score = tensor_array_ops.TensorArray(
dtype=inputs.dtype,
size=time_steps,
tensor_array_name='cosin_score')
input_ta = input_ta.unstack(inputs)
time = tf.constant(0, dtype='int32', name='time')
def _step (time, output_ta_t,cosin_score_t):
current_input = input_ta.read(time)
score = cosine2( current_input,state)
cosin_score_t = cosin_score_t.write(time, score)
output=current_input
# output, new_states = self.step_function(current_input,
# tuple(states))
# # 内部的逻辑
# for state, new_state in zip(states, new_states):
# new_state.set_shape(state.get_shape())
output_ta_t = output_ta_t.write(time, output)
return time + 1, output_ta_t,cosin_score_t
last_time,output,cos_score= control_flow_ops.while_loop(
cond=lambda time, *_: time < time_steps,
body=_step,
loop_vars=(time, output_ta,cosin_score),
parallel_iterations=32,
swap_memory=True,
maximum_iterations=input_length)
outputs = output.stack()
scores=cos_score.stack()
last_output = output_ta.read(last_time - 1)
axes = [1, 0] + list(range(2, len(outputs.get_shape())))
outputs = tf.transpose(outputs, axes)
scores=tf.transpose(scores, [2, 1, 0, 3])
return scores[0]
aaa=K.eval(lala(inputs,state))
print(aaa)
print(aaa.shape)
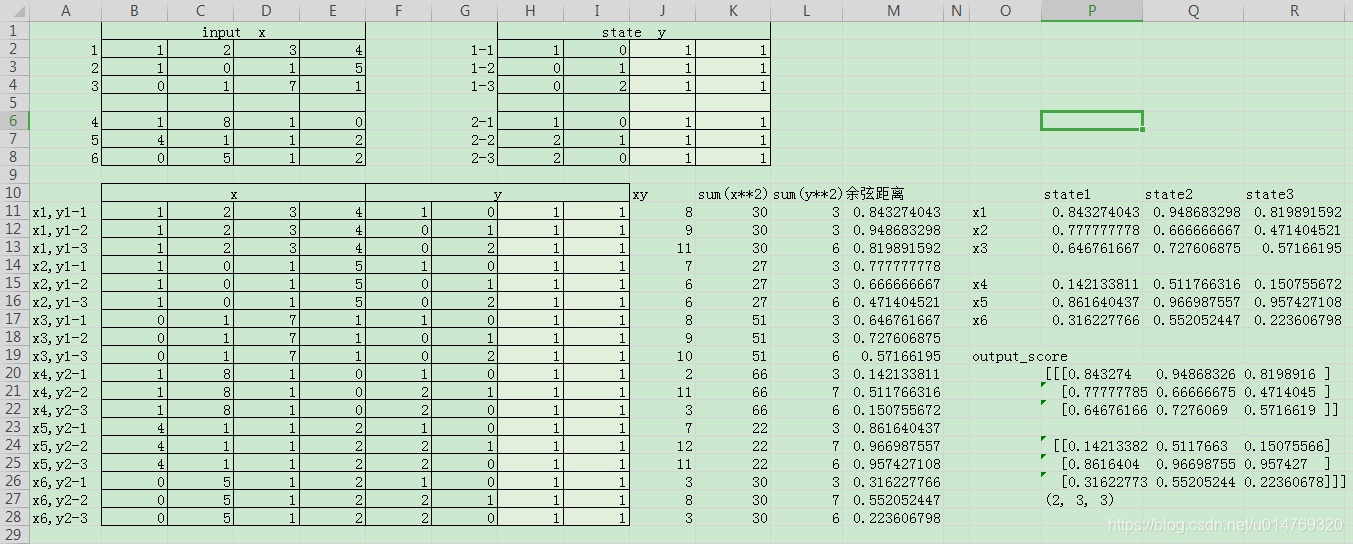





 本文介绍了一种使用TensorFlow和Keras实现的余弦相似度计算方法,包括定义输入张量、状态张量,以及通过矩阵运算计算余弦相似度的详细步骤。该方法适用于批量数据处理,为文本相似度、推荐系统等应用提供了基础。
本文介绍了一种使用TensorFlow和Keras实现的余弦相似度计算方法,包括定义输入张量、状态张量,以及通过矩阵运算计算余弦相似度的详细步骤。该方法适用于批量数据处理,为文本相似度、推荐系统等应用提供了基础。


















 491
491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









