







 本文深入探讨深度学习中的关键概念,包括数据集划分、模型偏差与方差分析、正则化技术、权重初始化、梯度下降优化算法、超参数调试及Batch正则化等,旨在帮助读者掌握深度学习模型的高效训练与优化。
本文深入探讨深度学习中的关键概念,包括数据集划分、模型偏差与方差分析、正则化技术、权重初始化、梯度下降优化算法、超参数调试及Batch正则化等,旨在帮助读者掌握深度学习模型的高效训练与优化。
train/dev(cross-validation)/test set设定
- in smaller datasets like 100, 1000, 10000,the proportion of every part is 70%/30%,or 60%/20%/20%.
- in large datasets like 1 million data or more,the proportion of every part like:98%/1%/1%,or 99.5%/0.25%/0.25%,99.5%/0.4%/0.1%.
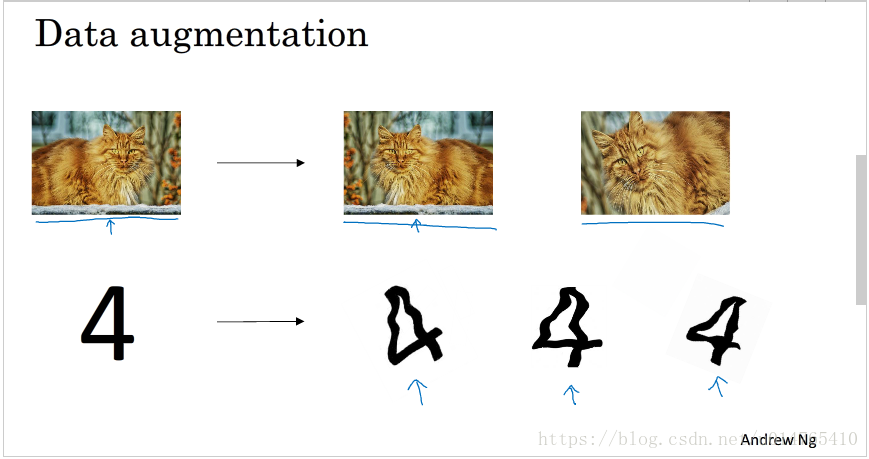
- note that :dev set should have same distribution of test set。比如:如果你的train data为网络中猫的照片,而test data为手机拍摄的猫的照片,则至少应该保证你的dev data也为手机拍摄的猫的照片。
- 由于dev set已经承担了validation的责任,所以没有test set也是可以的。
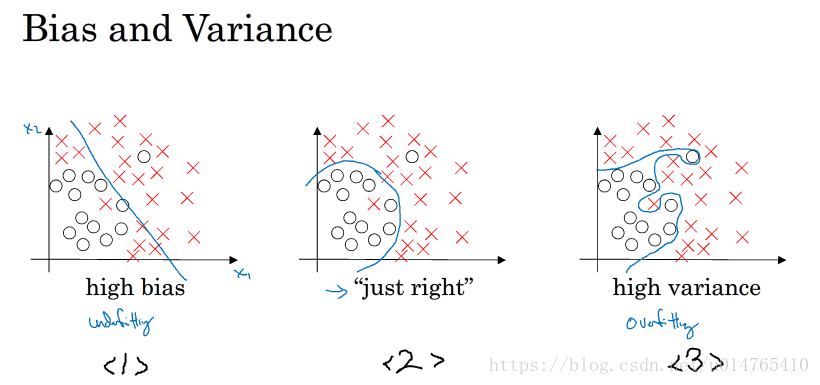
model bias 和 variance的分析
-
bias 过低时,可能导致大的variance,如图(3);适当增加bias,可以降低variance,如图(1)
-
model也可能出现这种情况,同时拥有高bias和高variance。如下图所示:
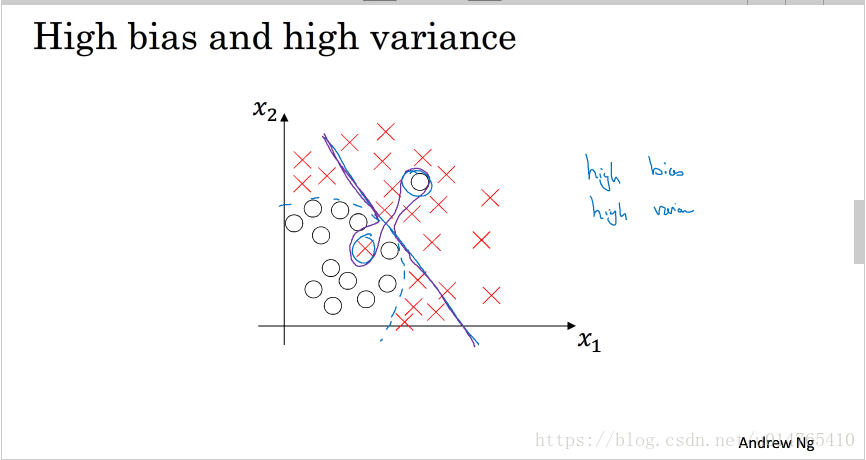
在实际应用中,我们可以通过检测model 的bias和variance情况,来决定采用何种方法提高model的performance。如:当model有很高的bias时,我们可以通过:1)增加训练时间;2)训练一个bigger nerual network;3)调整神经网络的结构;等方法来降低bias。当model有很高的variance时,我们可以通过1)增加data set;2)正则化;3)调整神经网络结果;等方法降低variance。深层神经网络的一个最大优点是在调节bias时,不会伤害到variance,vice versa。
正则化
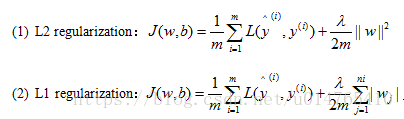
- logistic regression中正则化方式可以采用L1,或L2,其中通过L1正则化可以获得sparse weight which most of them equals 0。公式如下:
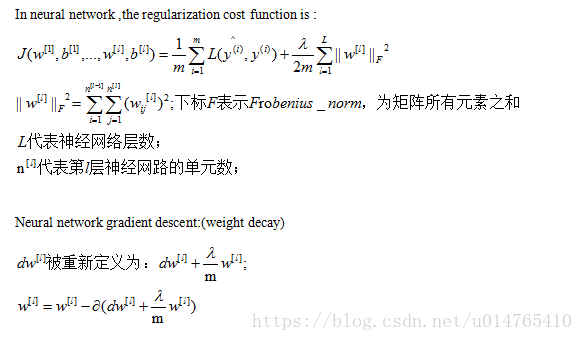
- 神经网络正则化公式如下:

- dropout regularizaiton
以下面的3层神经网络为例,介绍dropout regularization:
以第3层网络的dropout为例说明:
step1:自定义keep-probability;
step2:给第3层hidden layer各个unit随机赋予一个probability:np.random.rand(a3.shape[0],as.shape[1]),对于probability<keep-prabability的unit,将其remove。可以通过以下code实施:
import numpy as np
d3 = np.random.rand(as.shape[0],as.shape[1])<keep-prob #d3为boolean value:{True:保留的unit,False:去掉的unit};
a3 = np.multply(a3,d3) #将hidden layer3中的各个unit根据keep-prob进行删减后,得到新的hidden layer3
a3 /= keep-prob #为了保证修改前后hidden layer3的期望值不变,将新的a3除以keep-prob,从而保证,z^[4]^(z^[4]^=w^[4]^a^[3]^+b^[4]^)值不变
note that:dropout只在training阶段实施:在进行forward propagation和backward propagation前,先实施dropout,然后在进行propagation。每一次iteration中,dropout的unit都是随机的(根据各个unit上的随机概率与keep-prob的大小,决定其去留)。
dropout相当于L2 regularizaiton,能够降低|w|2的值。他常被用于计算机视觉,在这个领域input vector维度很高,为了避免overfitting,需要对w进行正则化,从而降低模型的复杂度。
dropout regularization的一个缺点是:使用它之后,很难计算cost function,因而很难绘制costfunction-iteration图来进行debug,一个折中的办法是,首先关闭dropout,绘制costfunction-iteration图,查看costfunction是否降低,如果没有bug,则打开dropout;
- 其它的正则化方法
归一化输入
当你的trainingdata各个feature的scale不同时,你可以对trainingdata进行normalization(mean=0,variance=1),这能加快gradient descent的收敛速度。需要注意的是:你的testdata需要用同样的normalization进行处理。
normalization并不会harm machine learning,所以,如果你不确定是否需要使用normalization,你可以always使用它。
梯度消失与梯度爆炸
When training deep neural network , exploding or vanishing gradient may happen ;Initializing your weight skillfully can effectly avoid this situation;
- 什么是梯度消失与梯度爆炸
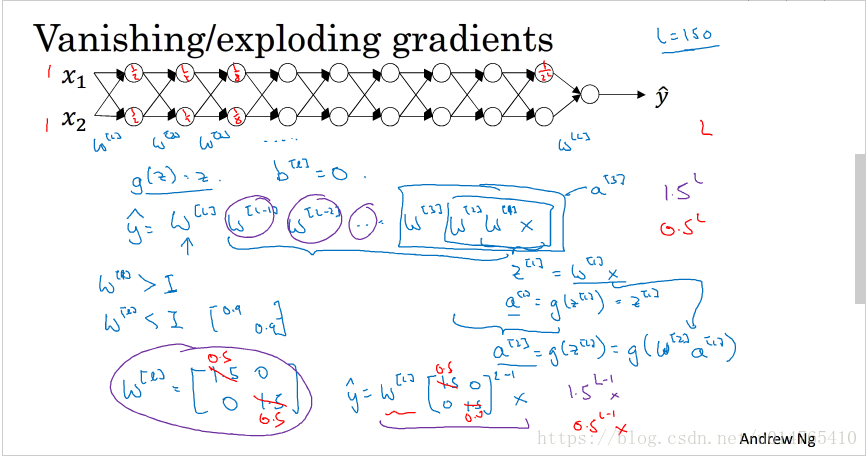
以上图的神经网络为例说明:
assuming that :active function g(z)=z
当各层的weight > 1时,则最后的output y=w[L]w[L-1]…w[1] x,y将以wL的方式增长,对应的gradient称为exploding gradient。
当各层的weight < 1时,则y将以wL的方式消减,对应的gradient称为vanishing gradient。
无论是exploding or vanishing gradient,都会降低gradient descent的收敛速度,特别是当gradient与L呈指数级差别时,更是如此。以上问题可以通过合适的初始化weight,来解决。(L:hidden layer的层数) - 神经网络weight的初始化
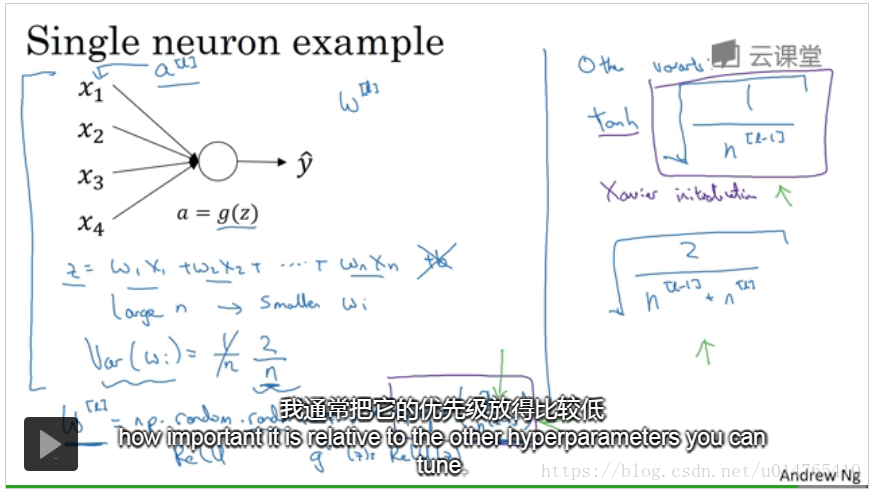
为了降低exploding or vanishing gradient的影响,我们可以initialize weight to guarantee the variance of weight equals 1/n,namely, variance(w[l])=1/n[l-1],n[l-1] denote the number of unit in layer l-1。
为了达到上述目的,我们可以将weight初始化为:w[l] = np.random.randn(shape) * np.sqrt(1/n[l-1]) #注意使用randn可以保证variance of weight符合要求。
If active function is ReLu:then : w[L]=np.random.randn(shape)*np.sqrt(2/n[L-1]);
If active function is tanh :then :w[L]=np.random.randn(shape)*np.sqrt(1/n[L-1]);sometimes,people use np.random.randn(shape)*np.sqrt(1/(n[L-1]+n[L]))
w[L] denote the weight of L layer;
n[L-1] denote the number of unit in L-1 layer;
通过gradient check formular来进行梯度检验
- gradient check formular
我们可以利用上述公式,检验backward propagation中的dw计算是否正确,具体实现方式如下:
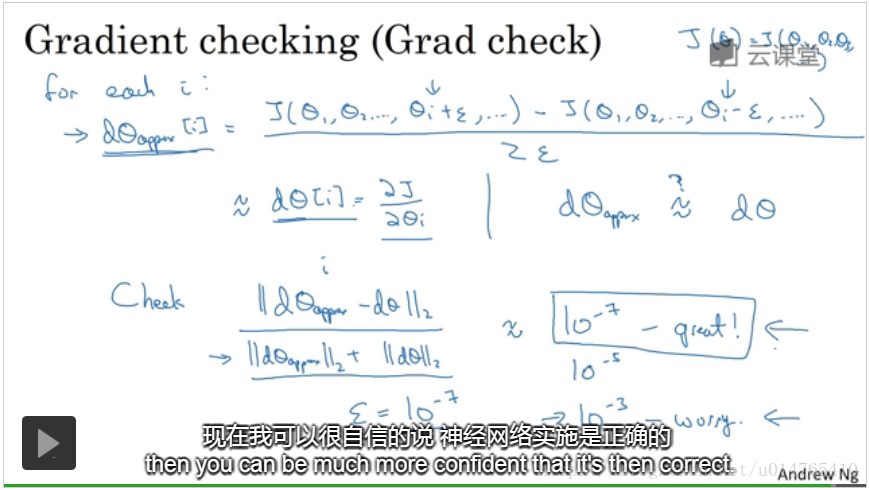
gradient dw_approx的近似值采用公式:dwi=(J(w1,w2,…wi+theta,…)-J(w1,w2,…,wi-theta,…))/2*theta;(assuming :theta=10-7)
检查 dw_approx与dw是否相等,如果:||dw_approx-dw||2/(||dw_approx||2+||dw||2)近似等于theta,则说明gradient计算正确;如果与theta相差好几个数量级,如10-3,则说明dw计算有误。
- gradient checking tips
gradient check只用于debug;
如果检查出异常,则检查dw各个分量与gradient check formular的差异,进行debug;
如果cost function有正则化项的话,则检测时,dw也要加上正则化项;
dropout regularization不能用gradient checking;
AndrowNg建议(只是偶尔使用):在初始化weight后使用一次gradient checking;然后training 几轮后,当weight都远离了0时,在使用一次;
Mini-batch梯度下降中的一些注意事项
- in large datasets(millions dataset):mini-batch GD do better than batch GD。
- mini-batch size的选择
当dataset < 2000,可以直接用batch GD
mini-batch size可以选择2的指数级,如:64,128,256,512等较为常见;
mini-batch size要与CPU/GPU内存 相符合。
可以将mini-batch size作为一个hyperparameter用cross-validation进行验证。
some algorithms better than standard gradient descent
在介绍其它算法前,首先了解一下指数加权平均:
指数加权平均
- 指数加权平均
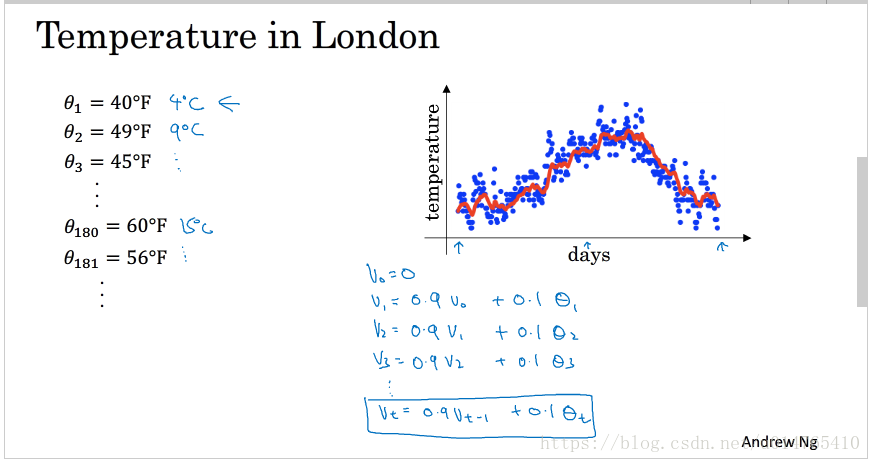
以days 和 temperature的关系来说明指数加权平均的定义:
如下图所示,theta_i表示第i天的温度。vi表示i天温度的加权平均(用来拟合第i天的温度)。
令v0=0,则vi=0.9 vi-1 + 0.1 theta_i,用该公式拟合的第i天的温度vi降低了当天温度theta_i的权值,且以一定权值加入了第i天以前的所有day的温度,这种方式得到的第i天的温度,稳定性更强,同时也能够极大的避免outlier的扰动。
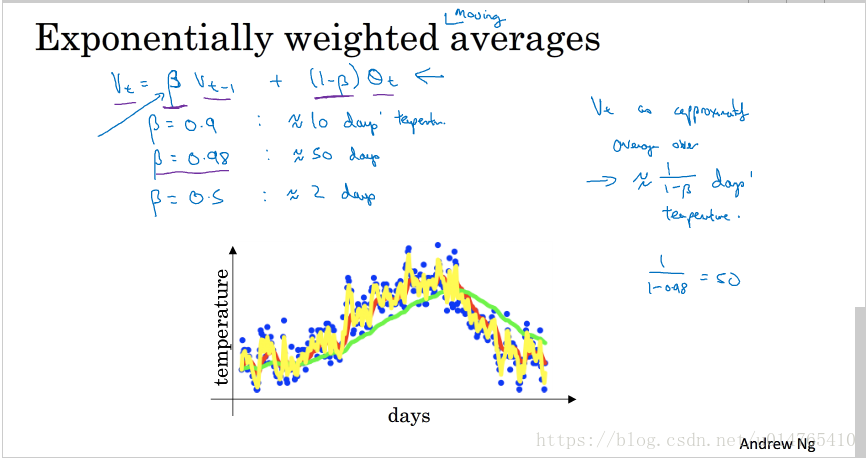
将上述公式一般化:vi=beta * vi-1 + (1-beta) * theta_i,如下图所示:
beta=0.9时,代表vi为10天数据的加权平均;
beta=0.98时,代表vi为50天数据的加权平均;
当beta取值较大时,说明vi上第i天的数据比例较小,其对天数day的响应会相对滞后,day-temperature曲线相对平滑。当beta取值较小时,则vi对day的响应很及时,但是,可能很容易受outlier的影响,day-temperature曲线非常的粗糙。
下面解释“指数加权平均”的数学意义,以v100为例:
v100 = 0.9 v99 + 0.1 theta_100
v100=0.9(0.9v98+0.1 theta_99) + 0.1 theta_100 = 0.1 theta_100 + 0.10.9 theta_99 + 0.92v98=0.1 theta_100 + 0.10.9 theta_99 + 0.10.92 theta_98 + 0.93 v97
从上边的演算可以看出v100实际上是theta_i vector与 0.1(0.9)i-100 vector的乘积。值得一提的是,beta1/(1-beta) 约等于 1/e,当betan的值过了1/e这个点后,其值会迅速下降。 - 指数加权平均的偏差修正
原指数加权平均公式:vi = beta vi-1 + (1-beta) theta_i,该公式存在一个问题,即:由于设定v0=0,因此,在最初的拟合过程中,vi偏小,随着时间的推移,该公式对temprature的拟合越来越好,如下图所示(绿色曲线为标准曲线,紫色曲线为该公式拟合的结果):
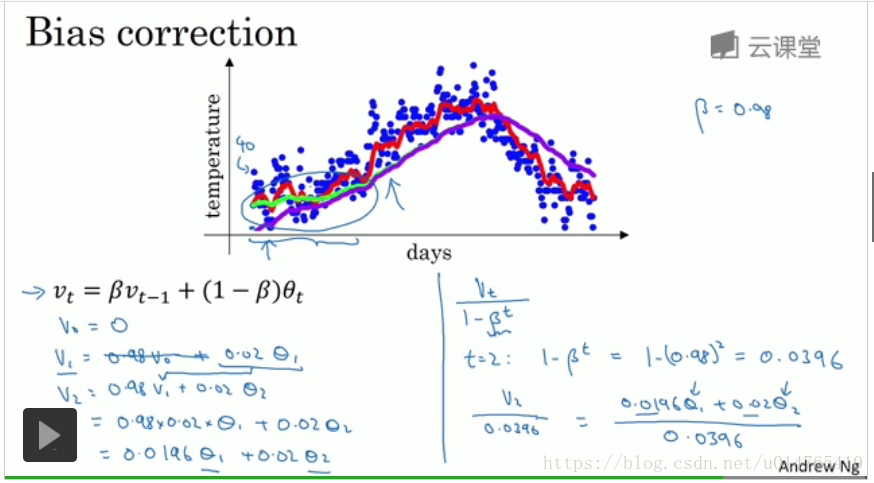
为了解决上述的困境,在原公式的基础上,在加一个步骤:vi = vi/1-(beta)i,其中i为day。当i较小时,(beta)i的值较大,分母整体较小,此时可以增加原始vi的值,而当i较大时,(beta)i的值较小,分母整体接近于1,此时vi与原始的vi相近。这种做法,在一定程度上解决了“指数加权平均”在最初的拟合过程中,数值偏小的问题。将改进方法总结如下:
step1:i = beta vi-1 + (1-beta) theta_i
step2:vi = vi/1-(beta)i
动量梯度下降法(momentum)
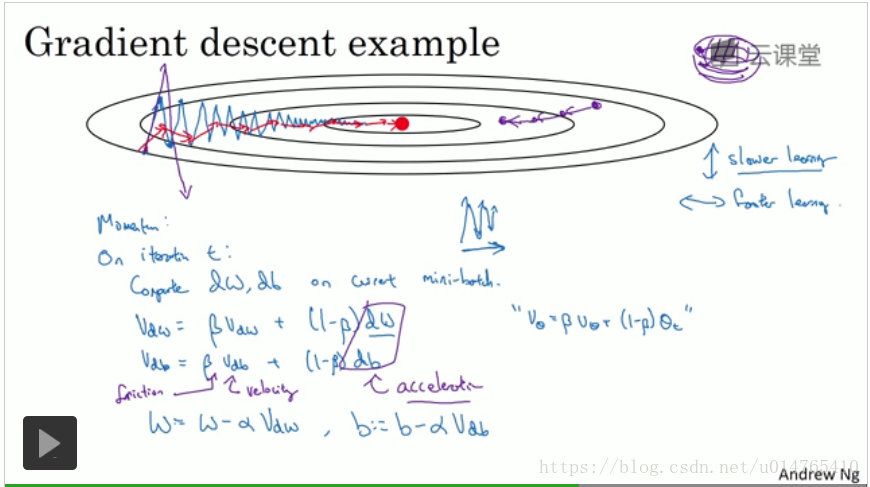
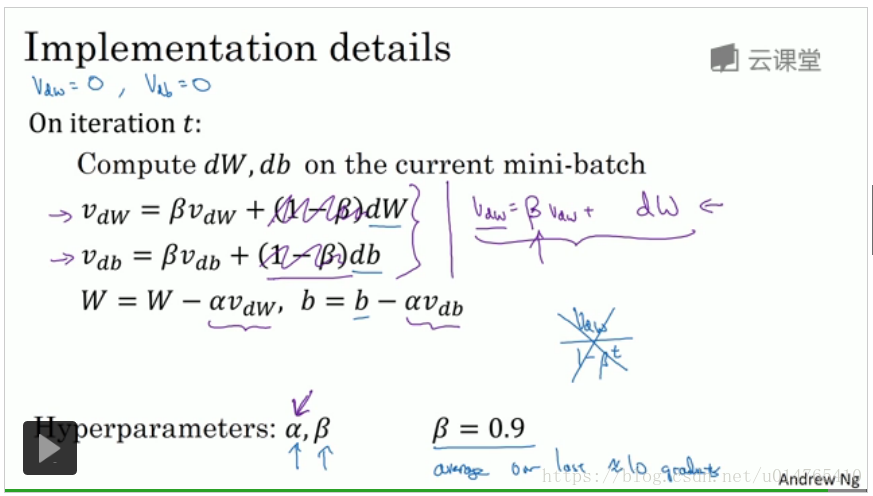
动量梯度下降算法 核心思想:利用“指数加权平均”,计算dw,db,具体操作如下图所示:
初始化:v_dw=0,v_db=0
通过gradient descent计算:dw,db
v_dw := beta * v_dw + (1-beta) * dw
v_db := beta * v_db + (1-beta) * db
更新w,b:
w := w - alpha * v_dw
b := b - alpha * v_db
动量梯度算法在求w,b的更新步长时,除考虑当前迭代中的dw, db外,还考虑了前 1/(1-beta) 次的dw,db,从而alleviate the oscillation of weight, b,进而加快学习速度。
一般,beta=0.9时,算法运行效果较好。
note that:动量梯度算法 perform better than 标准梯度算法。
除上述介绍的动量梯度算法之外,还有一种“动量梯度算法”(如下图right-hand formular),他将dw,db上的系数(1-beta)去除,即:v_dw := beta * v_dw + dw,w := w - alpha * v_dw,这种改变相当于对v_dw做了1/(1-beta)的缩放,它使得alpha对beta的变化很敏感,因此,建议使用前述“动量梯度算法”。
RMSprop(root mean squaring prop)
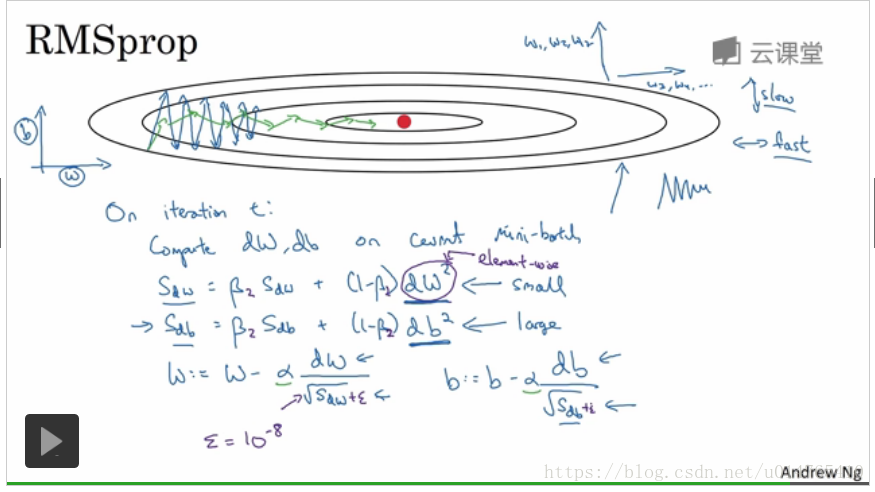
RMSprop与momentum一样,可以减小在迭代过程中w,b的oscillation.
其具体定义如下图示:
初始化S_dw,S_db 为 0
利用gradient descent 计算 dw,db
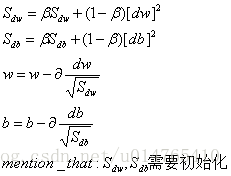
为了防止由于S_dw或S_db = 0,而使更新步长过大,可在原更新步长的分母项上 加一个数值10-8,如下图所示;
在RMSprop中,可以使用较大的learning rate。
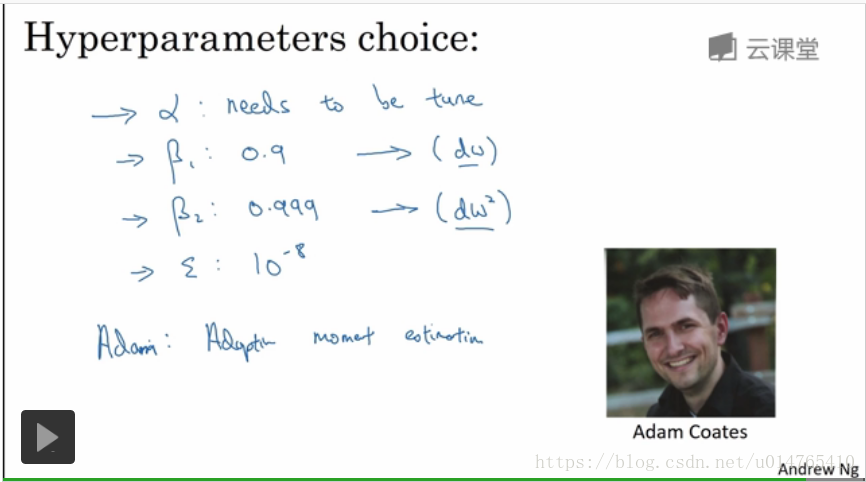
Adam优化算法(adaptive moment estimation)
Adam优化算法结合了“momentum”和“RMSprop”两个算法,可加快neural network的学习速度,具体如下图所示:
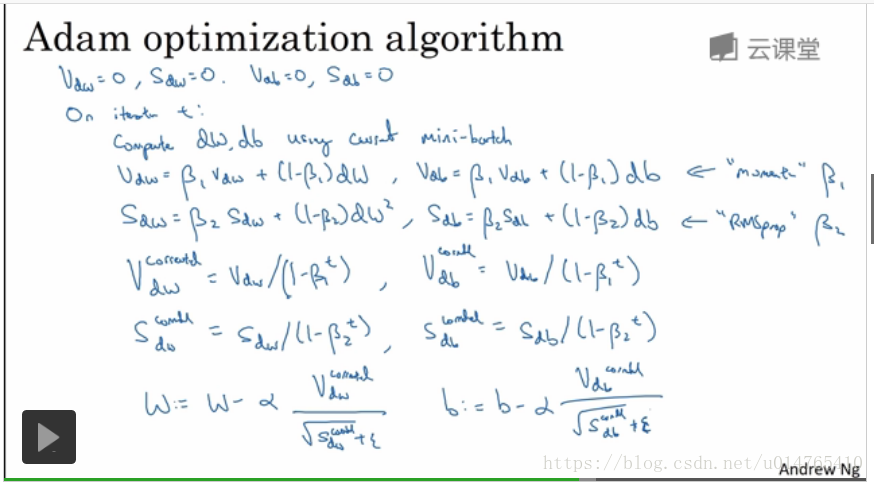
在adam中,beta1,beta2,ekson常采用以下默认值,alpha需要进行选择,具体如下图示:
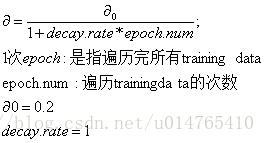
学习速率衰减
当各种gradient descent algorithm运行了一段时间后,w,b会比较接近其minimum,此时,如果还用以前的learning rate进行update的话,很可能错过w,b的minimum,因此,可以构建一个learning rate随着iteration进行而不断衰减的公式,从而使得learning rate适应w,b的变化,具体公式如下:
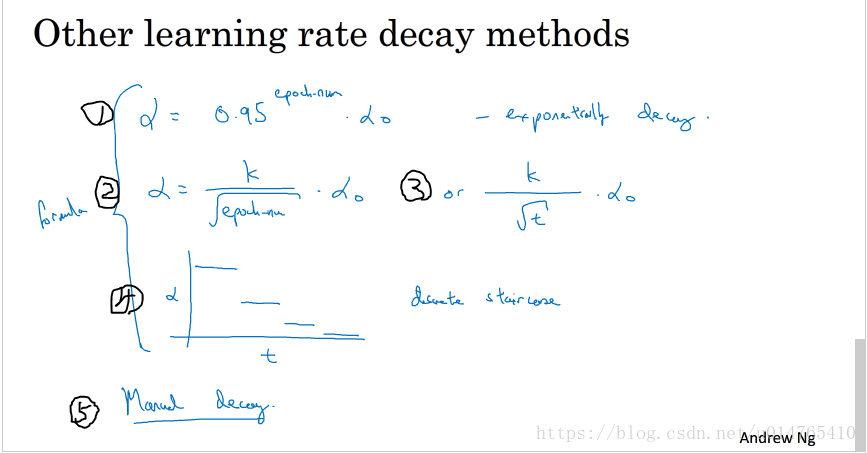
下图列了一些其他的learning rate衰减公式:
formular1: exponential decay:epoch.num:遍历trainingdata的次数
formular3: t:iteration的次数
formular4: discrete staircase:每到达一定的iteration次数,就更换一次alpha
formular5:如果你的learning model比较小的话,可以采用手动的方式调节alpha的大小,如:每几个小时,or几天手动调节一次。
local optima VS saddle point
如下图所示,在low dimenstional space,我们常会遇到“局部最优点”,这些point会影响 optimal algorithm的判断,使他们限于“局部最优点”,阻止他们向global optima迈进。而在high dimenstional space(>20000),比起“局部最优点”,我们更常遇到的是“saddle point:gradient=0的点”,他会使optimal algorithm在很长的一段时间内进入一个平坦区,从而导致“w,b 更新缓慢,原地踏步”,而"momentum,RMSprop,Adam ”等算法均能有效克服saddle point的影响,加快algorithm学习进程。
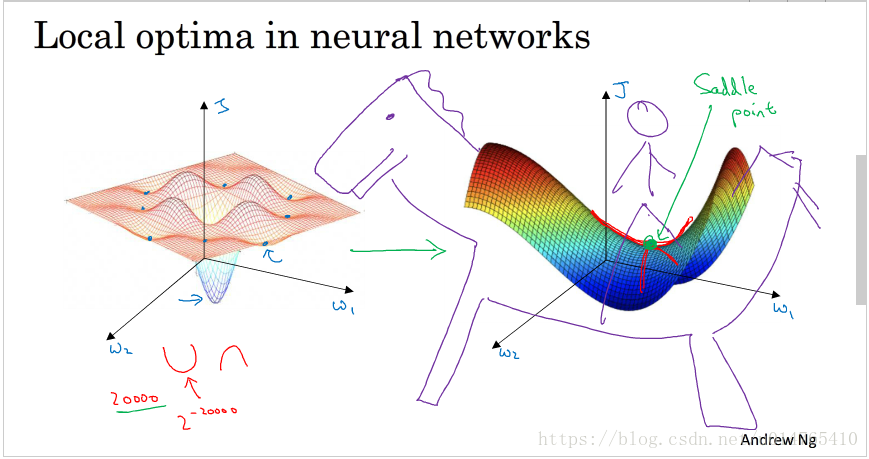
Note that:从上面的示例也可以看出,我们对于low dimension space的认识,并不能直接转嫁到high dimension space。
超参数调试
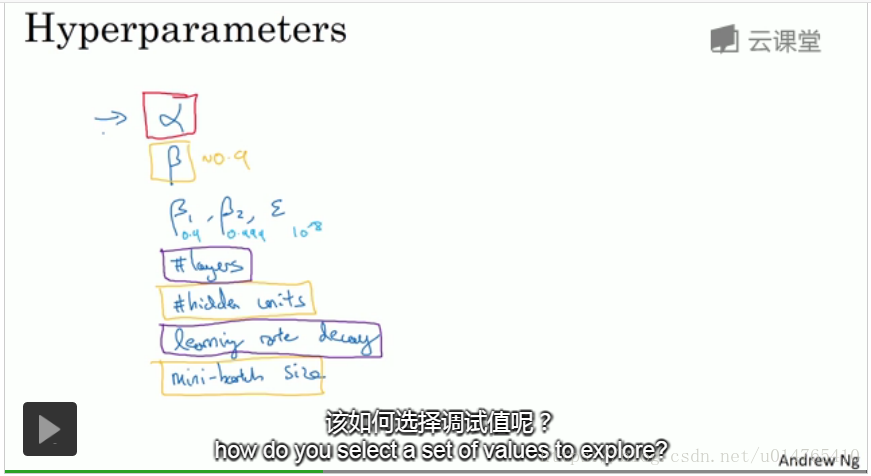
各个hyperparameter的重要程度,如下图所示:
notation interpretion:
alpha: learning rate
beta:指数加权平均的参数
beta1,beta2,ekson:Adam算法的hyperparameter
the importance of hyperparameter:红色方框内超参数第一重要;黄色方框内超参数第二重要;紫色方框内超参数第三重要;蓝色字体为一些超参数默认值;
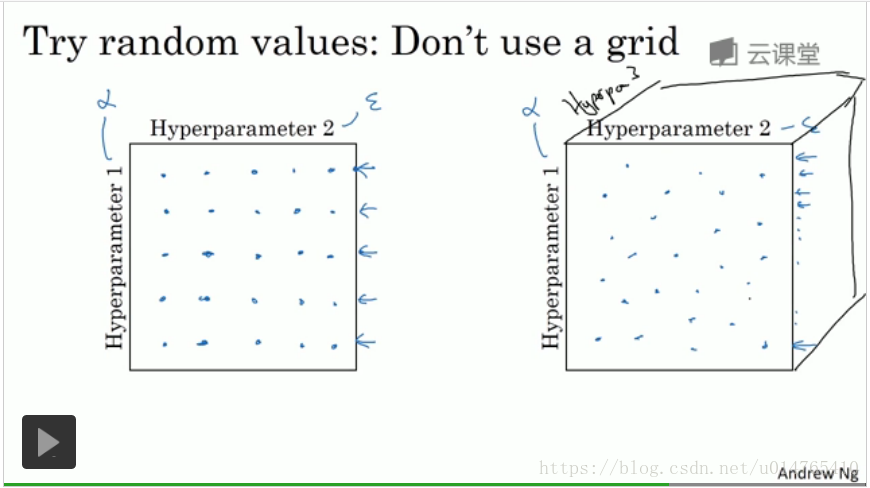
如何选取超参数值
- 比起规则选取,随机选取,更有可能探究到best hyperparameter,如下图所示,如果采用规则选取,则hyperparameter1最多可选取5个点(左图),而如果采用随机选取,则hyperparameter1可以选取25个点(右图)。
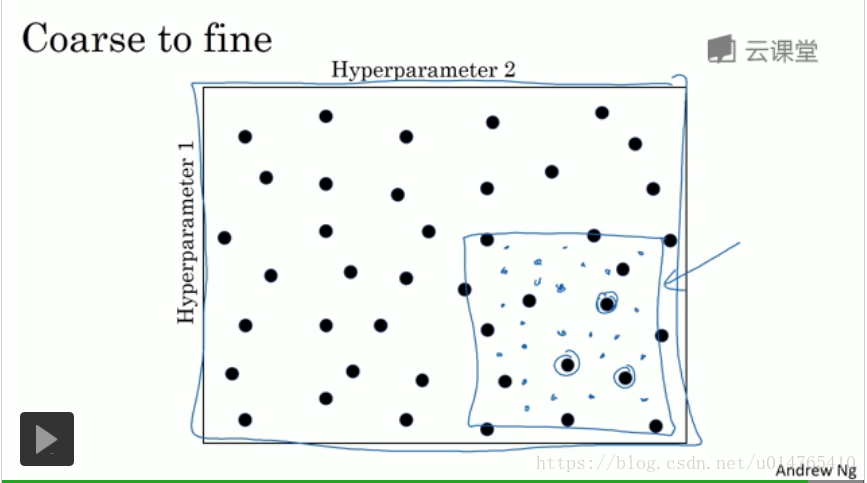
通过上述的随机选取,可以初步确定一个最优hyperparameter的范围,在该范围内,在密集布点,寻求最优的hyperparameter。
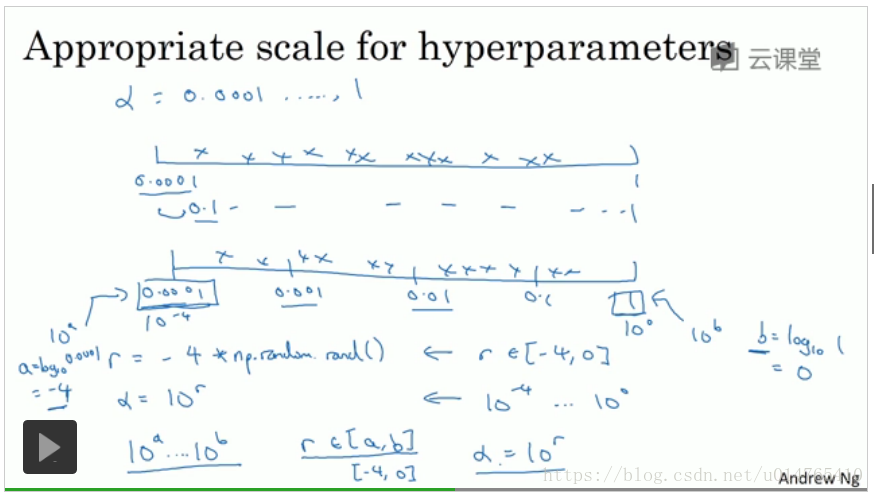
- 为hyperparameter选择合适的范围
首先说明learning rate的选取:
错误的做法是,直接让alpha = np.random(0.0001,1),因为,这样做,alpha落在区间[0.1,1]的概率为90%,而只有10%的概率会落在[0.0001,0.1],而我们希望的是,alpha可以均匀的落在区间:0.0001-0.001-0.01-0.1-1,可以采用的做法如下:
r= -4 * np.random.rand()
alpha=10r
或者是:
令alpha belong to [10a,10b]
r=np.random(a,b)
alpha=10r
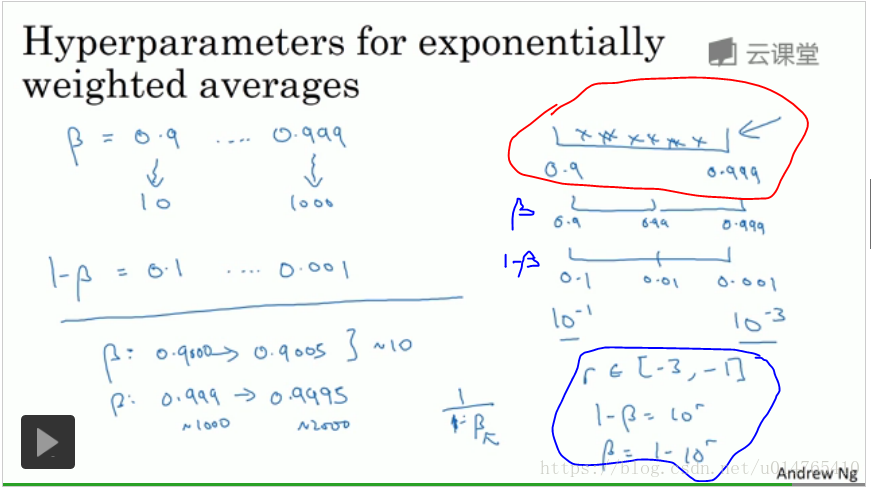
指数加权平均中的参数beta:
如果想将beta的搜索范围限于[0.9,0.999],错误的做法是直接使:beta=np.random(0.9,0.999),这样无法到到均匀采样的效果,且beta在不同的区间内取值,对于指数加权平均会造成不同的影响,如:beta=0.9,or ,beta=0.9005,其加权平均基本都是取值last 10 samples,但是,如果beta=0.999,or,beta=0.99则其加权平均分别是在last 1000 ,last 100个samples上进行的,会影响最终的指数加权平均的走向。
正确的做法是:限定1-beta的搜索范围为[0.1,0.001],like alpha,令:
r=np.random.(-3,-1)
1-beta 为:10r
与learning rate和beta搜索范围定义不同,layer数目,以及hidden layer units数目的搜索范围可以直接采用np.random(a,b)的方式(a,b均为int)。
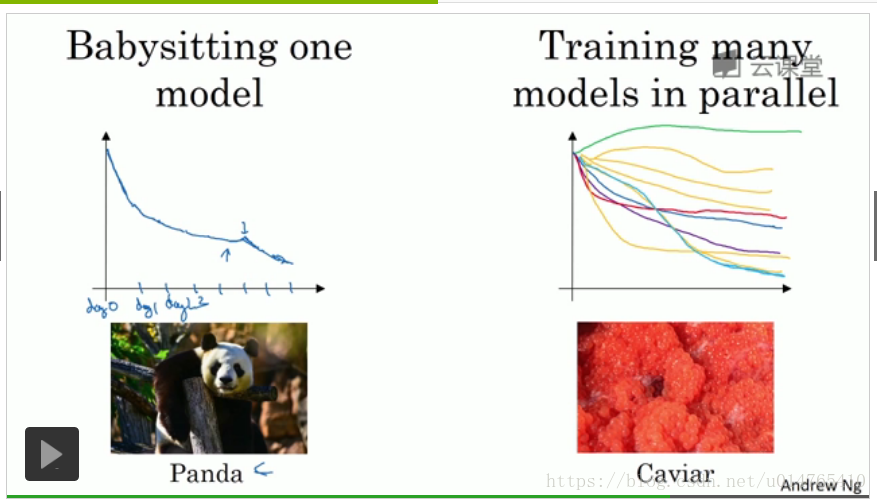
在实际工作中,绘制不同hyperparameter下,cost function的走势,选择能够使cost function最小的hyperparameter。如果,服务器CPU足够的话,可以同时绘制不同hyperparameter下,cost function的走势,如果,服务器CPU不够的话,一次只绘制一个hyperparameter下,cost function的走势,隔几天后,改变hyperparameter的取值,查看cost function的走势,如果cost function升高的话,则说明该hyperparameter取值bad,舍掉。
Batch 正则化
Batch正则化原理
Batch正则化,实施的是mini-batch gradient descent,其正则化的含义是针对各层hidden layer的z值展开的,具体过程如下:

在上述第3步求Znorm中,分母之所以要加入eclipson,是为了防止分母为0的情况发生。
在上述第4步中,引入gama和beta,是为了使Z拥有不同的mean和variance:如果不引入gama和beta,则Z的mean=0,variance=1,在activation function sigmoid中,Z值将集中在曲线中间部分,这会使得active function从sigmoid 转化为一个linear (如下图),从而降低active function的power。

在logistic 中,我们将input 进行normalize(mean=0,variance=1),能够加快学习的速度。在neural network中,我们可将batch norm应用于每一层hidden layer中,从而加快其学习速度,其实施过程如下:
step1:求hidden layer的z值;
step2:求z的batch norm,z_norm;
step3:将z_norm作为hidden layer中active function的输入;
step4:计算下一层hidden layer的z值,重复上述步骤1-3;
在batch norm中,gama和beta为parameter,同weight一样,可以通过gradient descent ,momentum,RMSprop,Adam获得更新方式(如:w := w - dw)。
具体步骤如下图所示:
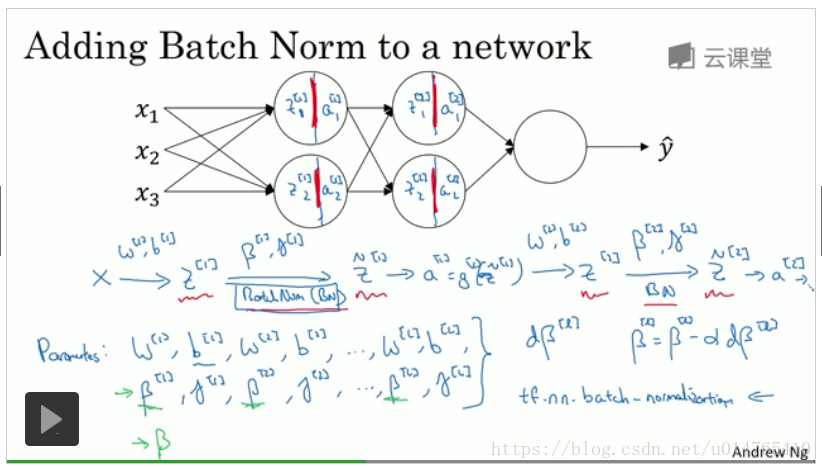
值得一提的是,如果neural network决定使用batch norm,则在计算z时,可以将b(截距)舍去,即:z=wx。这是因为,在计算z_norm时,将z去中心化时,同样会从z中去除b。
如何在预测test sample时使用batch norm
当用batch norm训练neural network时,在利用训练好的neural network进行test sample的预测时,首先要将test sample 进行 batch norm,具体操作如下:
way1:利用指数加权平均求test sample normalization中的mean和variance
step1:假设每一次iteration中得到的mean ,variance为m_i,v_i,i为iteration次数
step2:利用指数加权平均求最后一次iteration时的mean,variance:
将mean ,variance初始化为0
在每一次iteration i中执行下述步骤:
对于每一层的hidden layer:
mean := beta * mean + (1-beta) * m_i
variance := beta * variance + (1-beta) * v_i
最终得到的mean,variance即为test sample normalization的mean,variance。
way2:将所有的trainingdata一次性的投入训练好的neural network,利用batch norm的公式,求得每一层hidden layer的mean,variance。
batch norm的意义
- batch norm可以使得neural network对于input distribution的变化更加的robust:
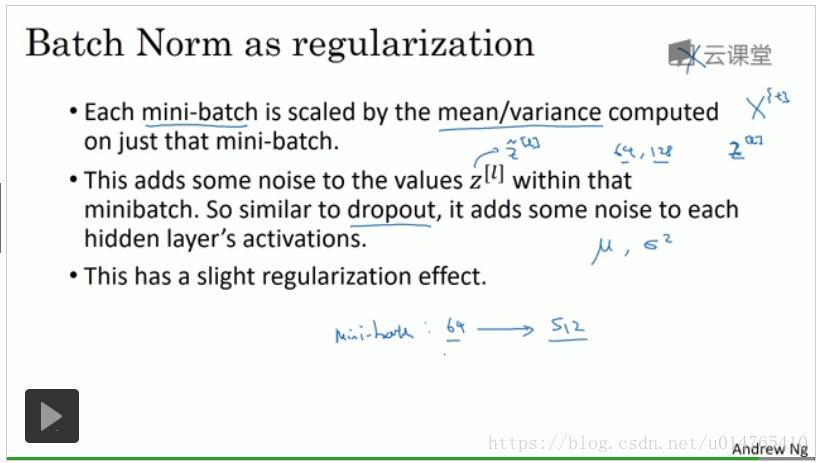
不管input的distribution为什么,至少可以保证每个hidden layer的z值mean和variance为定值,从而降低z distribution的变化程度,使得各个hidden layer的训练相对稳定,从而使neural network对于input 的变化具有更强的适应性。 - batch norm在一定程度上具有正则化的功能(但其主要用途并不是“正则化”)
softmax 回归
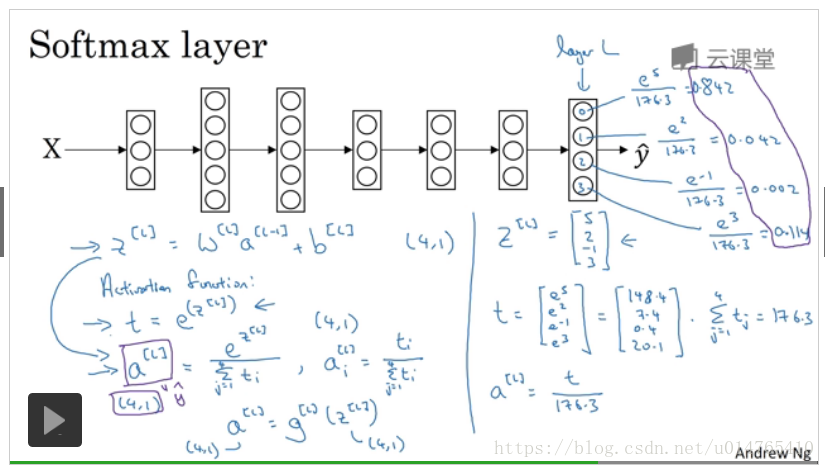
softmax是用来解决多分类问题的:在neural network的final layer使用softmax active fuction,输出的是各类的概率值,softmax function具体如下:
在求得 final layer z后:

softmax-neural network的具体框架如下:
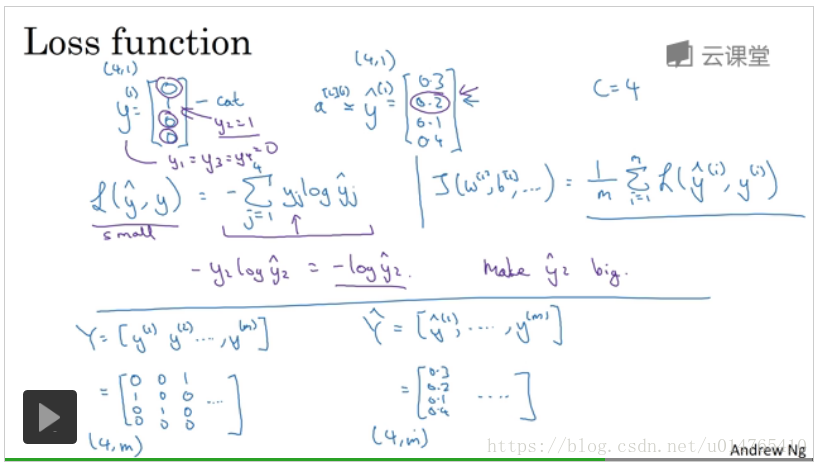
softmax的cost function是最大似然估计,如下PPT:
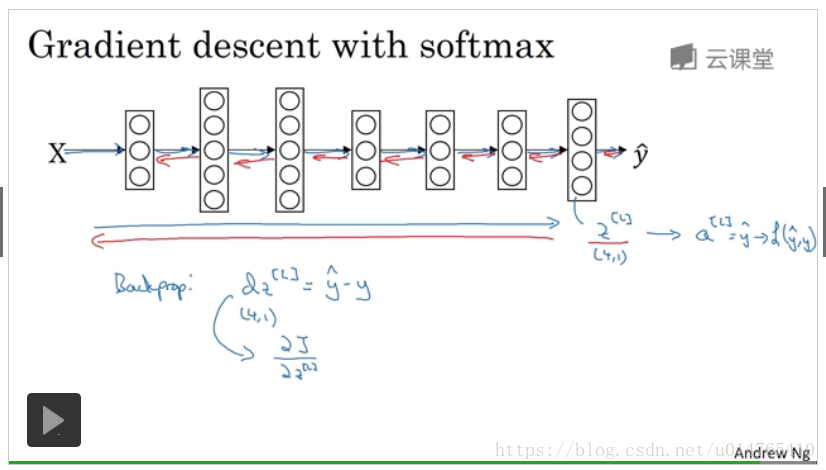
softmax的backward propagation中第一个;(similar to standard backward propagation in standard neural network),如下PPT所示:
深度学习框架


















 2438
2438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











