




磁悬浮轴承电流环被控制对象等效为RL串联电路模型,电路输入为电压,输出/控制目标为电流。电路拓扑如下:
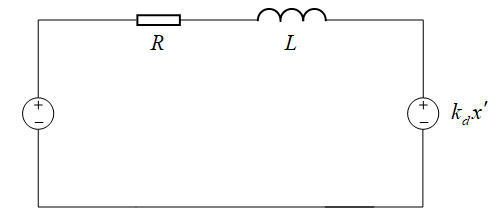
忽略反电势影响,电路微分方程及拉氏变换:
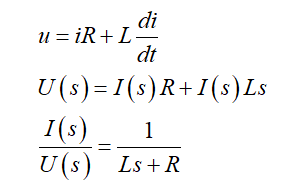
因此电路等效传递函数为:

其中,L为标称电感,R为标称电阻。
考虑控制器采样时间T,同于PWM周期T,将系统延时等位为:
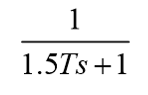
功率驱动增益为:Kpwm。
采用PI控制器,则系统框图为:
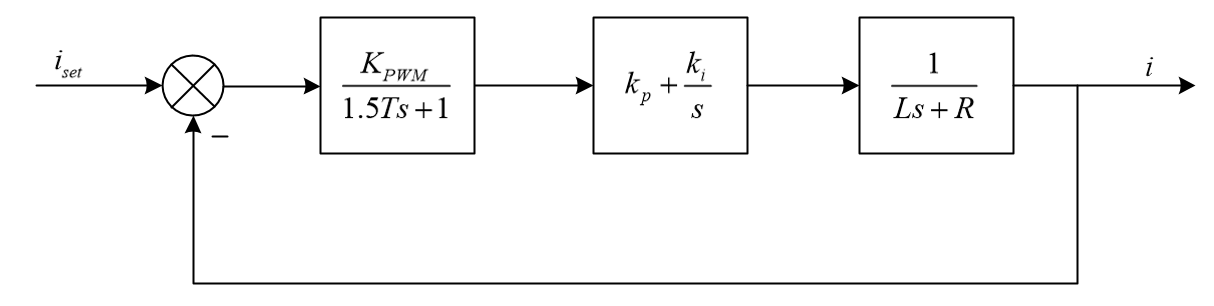
系统开环传递函数:
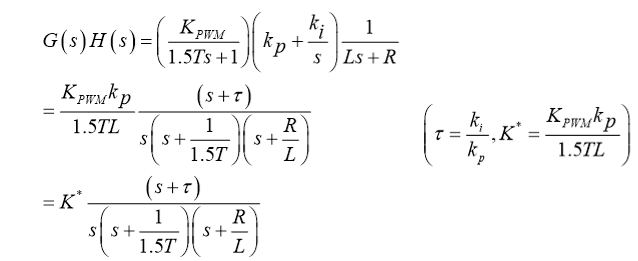
通过零极点对消方法,得:
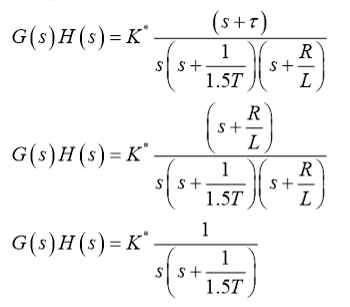
其中:

计算系统闭环传递函数,并按照典型II型系统最优阻尼比整定参数,得:
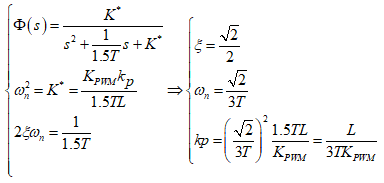
系统参数整定,计算kp、ki:
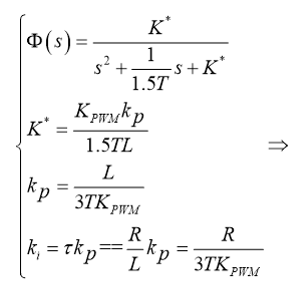
将kp、ki带入系统闭环传递函数,并等效化简:
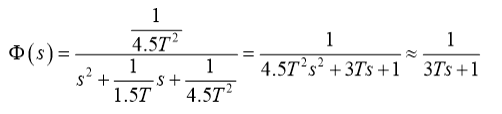
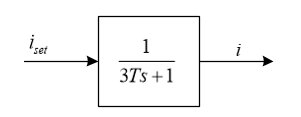
得电流环等效传递环数:
按如下设定系统参数,并计算控制参数:
|
单元 |
参数定义 |
参数 |
数值 |
单位 |
|
功率单元 |
电压 |
Udc |
100 |
VDC |
|
开关频率 |
f |
20000 |
Hz | |
|
开关周期 |
T |
0.00005 |
s | |
|
桥臂增益 |
Kpwm |
1 |
No | |
|
—— |
—— |
—— |
—— |
—— |
|
磁轴承参数 |
电感 |
L |
5.36E-03 |
H |
|
电阻 |
R |
0.15 |
Ω | |
|
—— |
—— |
—— |
—— |
—— |
|
电流环 |
根轨迹增益 |
K* |
8.89E+07 |
No |
|
PID比例系数 |
Kp |
3.57E+01 |
No | |
|
PID积分系数 |
Ki |
1000 |
No | |
|
惯性时间常数 |
Ts |
150 |
us | |
|
响应时间95% |
ts |
450 |
us |
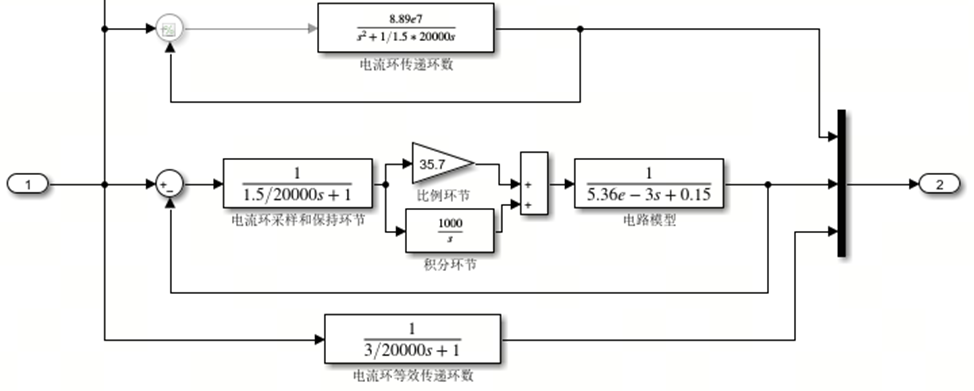
在MATLAB/simulink搭建仿真模型:
根据所搭建传递函数,分析系统响应时间如下:
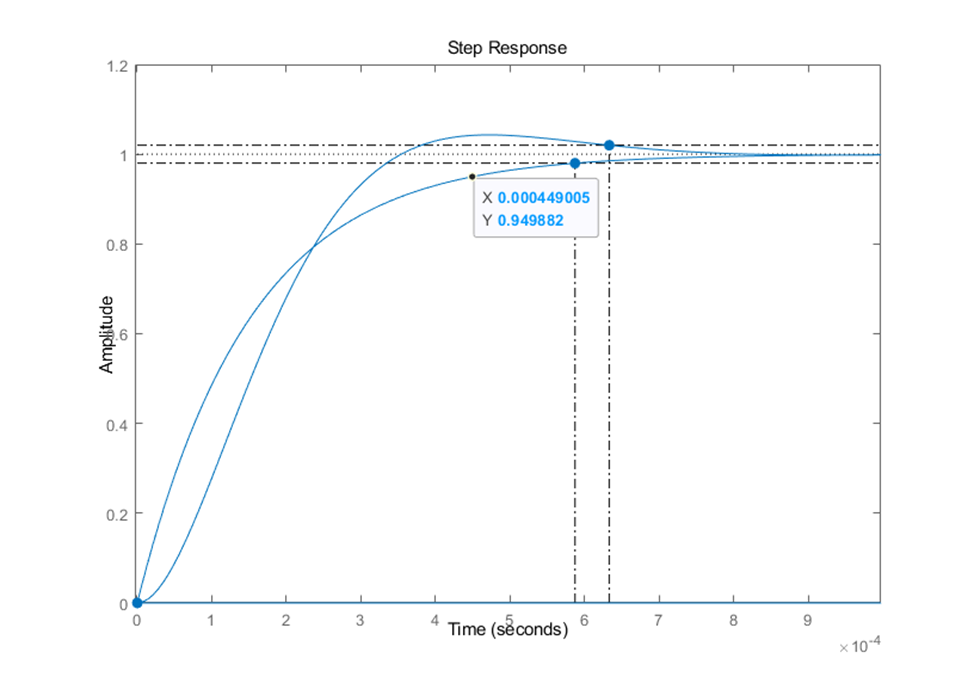
结果表明,阶跃响应时间仿真结果和计算结果基本一致 ,参数整定合理。


















 594
594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











