




注:本文为 “自动控制原理知识点” 相关经典博文重排 Ref 1。
因 csdn 博客篇幅合并超限,四篇重排连载,不定期修订。
图片清晰度,限于引文原状。
更换部分模糊图片或直接转为文字。
如有内容异常,请看原文。
自动控制原理知识点整合归纳(韩敏版)
#self-discipline# 于 2020-10-27 19:06:03 发布
自动控制
在脱离人的直接干预的情况下,利用控制装置使被控对象的工作状态按照预定的规律运行。
控制系统的数学表述
控制系统的数学模型
微分方程是表示控制系统内在函数关系的数学模型,通过求解微分方程可以得到系统响应和相关系统性能参数。
Laplace 变换
Laplace 变换在解算中的作用
拉普拉斯变换将时域微分方程转换为复数域上的代数方程,通过对代数方程的求解,经过拉普拉斯反变换可以更便捷地得到原微分方程的解。过程如下:
- 对微分方程进行拉普拉斯变换,将时域转化为复数域代数。
- 解得代数方程的象函数表达式。
- 进行拉普拉斯反变换,得到时域解。
Laplace 变换相关公式
- L [ d n d t n f ( t ) ] = s n F ( s ) − ∑ k = 1 n s n − k f ( k − 1 ) ( 0 − ) \mathcal{L}\left[\frac{d^n}{dt^n}f(t)\right] = s^n F(s) - \sum_{k=1}^{n} s^{n-k} f^{(k-1)}(0^-) L[dtndnf(t)]=snF(s)−∑k=1nsn−kf(k−1)(0−)。当 f ( t ) f(t) f(t) 及其导数在 t = 0 t=0 t=0 处初始值为零时,第二项可舍去。
- L [ ∫ ⋯ ∫ f ( t ) d t n ] = F ( s ) s n + ∑ k = 1 n 1 s n − k + 1 [ ∫ ⋯ ∫ ( d t ) k ] t = 0 − \mathcal{L}\left[\int \cdots \int f(t) dt^n\right] = \frac{F(s)}{s^n} + \sum_{k=1}^{n} \frac{1}{s^{n-k+1}} \left[\int \cdots \int (dt)^k\right]_{t=0^-} L[∫⋯∫f(t)dtn]=snF(s)+∑k=1nsn−k+11[∫⋯∫(dt)k]t=0−。当 f ( t ) f(t) f(t) 及其各重积分在 t = 0 t=0 t=0 处为零时,第二项可舍去。
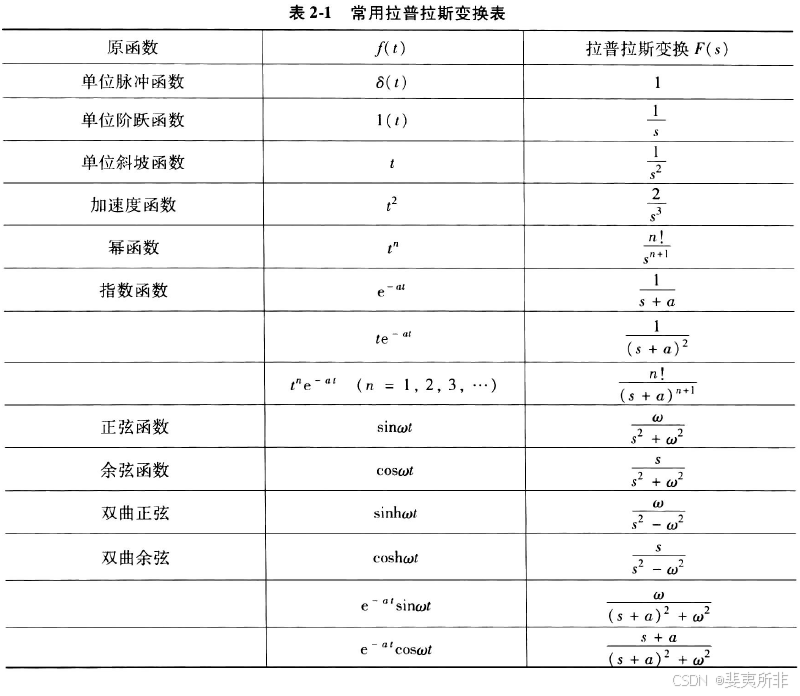
表 2-1 常用拉普拉斯变换表 img
| 原函数 | f ( t ) f(t) f(t) | 拉普拉斯变换 F ( s ) F(s) F(s) |
|---|---|---|
| 单位脉冲函数 | δ ( t ) \delta(t) δ(t) | 1 |
| 单位阶跃函数 | 1 ( t ) 1(t) 1(t) | 1 s \frac{1}{s} s1 |
| 单位斜坡函数 | t t t | 1 s 2 \frac{1}{s^{2}} s21 |
| 加速度函数 | t 2 t^{2} t2 | 2 s 3 \frac{2}{s^{3}} s32 |
| 幂函数 | t n t^{n} tn | n ! s n + 1 \frac{n!}{s^{n + 1}} sn+1n! |
| 指数函数 | e − a t e^{-at} e−at | 1 s + a \frac{1}{s + a} s+a1 |
| t e − a t te^{-at} te−at | 1 ( s + a ) 2 \frac{1}{(s + a)^{2}} (s+a)21 | |
| t n e − a t t^{n}e^{-at} tne−at ( n = 1 , 2 , 3 , ⋯ ) (n = 1,2,3,\cdots) (n=1,2,3,⋯) | n ! ( s + a ) n + 1 \frac{n!}{(s + a)^{n + 1}} (s+a)n+1n! | |
| 正弦函数 | sin ω t \sin\omega t sinωt | ω s 2 + ω 2 \frac{\omega}{s^{2}+\omega^{2}} s2+ω2ω |
| 余弦函数 | cos ω t \cos\omega t cosωt | s s 2 + ω 2 \frac{s}{s^{2}+\omega^{2}} s2+ω2s |
| 双曲正弦 | sinh ω t \sinh\omega t sinhωt | ω s 2 − ω 2 \frac{\omega}{s^{2}-\omega^{2}} s2−ω2ω |
| 双曲余弦 | cosh ω t \cosh\omega t coshωt | s s 2 − ω 2 \frac{s}{s^{2}-\omega^{2}} s2−ω2s |
| e − a t sin ω t e^{-at}\sin\omega t e−atsinωt | ω ( s + a ) 2 + ω 2 \frac{\omega}{(s + a)^{2}+\omega^{2}} (s+a)2+ω2ω | |
| e − a t cos ω t e^{-at}\cos\omega t e−atcosωt | s + a ( s + a ) 2 + ω 2 \frac{s + a}{(s + a)^{2}+\omega^{2}} (s+a)2+ω2s+a |
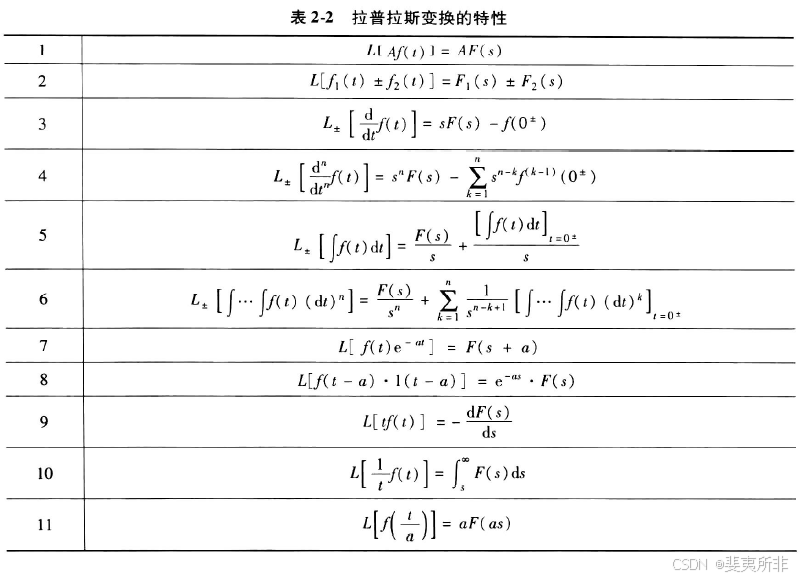
表 2-2 拉普拉斯变换的特性 img
| 序号 | 特性 |
|---|---|
| 1 | L [ A f ( t ) ] = A F ( s ) L[Af(t)] = AF(s) L[Af(t)]=AF(s) |
| 2 | L [ f 1 ( t ) ± f 2 ( t ) ] = F 1 ( s ) ± F 2 ( s ) L[f_{1}(t)\pm f_{2}(t)] = F_{1}(s)\pm F_{2}(s) L[f1(t)±f2(t)]=F1(s)±F2(s) |
| 3 | L ± [ d d t f ( t ) ] = s F ( s ) − f ( 0 ± ) L_{\pm}\left[\frac{\mathrm{d}}{\mathrm{d}t}f(t)\right]=sF(s)-f(0^{\pm}) L±[dtdf(t)]=sF(s)−f(0±) |
| 4 | L ± [ d n d t n f ( t ) ] = s n F ( s ) − ∑ k = 1 n s n − k f ( k − 1 ) ( 0 ± ) L_{\pm}\left[\frac{\mathrm{d}^{n}}{\mathrm{d}t^{n}}f(t)\right]=s^{n}F(s)-\sum_{k = 1}^{n}s^{n - k}f^{(k - 1)}(0^{\pm}) L±[dtndnf(t)]=snF(s)−∑k=1nsn−kf(k−1)(0±) |
| 5 | L ± [ ∫ f ( t ) d t ] = F ( s ) s + [ ∫ f ( t ) d t ] t = 0 ± s L_{\pm}\left[\int f(t)\mathrm{d}t\right]=\frac{F(s)}{s}+\frac{\left[\int f(t)\mathrm{d}t\right]_{t = 0^{\pm}}}{s} L±[∫f(t)dt]=sF(s)+s[∫f(t)dt]t=0± |
| 6 | L ± [ ∫ ⋯ ∫ f ( t ) ( d t ) n ] = F ( s ) s n + ∑ k = 1 n 1 s n − k + 1 [ ∫ ⋯ ∫ f ( t ) ( d t ) k ] t = 0 ± L_{\pm}\left[\int\cdots\int f(t)(\mathrm{d}t)^{n}\right]=\frac{F(s)}{s^{n}}+\sum_{k = 1}^{n}\frac{1}{s^{n - k + 1}}\left[\int\cdots\int f(t)(\mathrm{d}t)^{k}\right]_{t = 0^{\pm}} L±[∫⋯∫f(t)(dt)n]=snF(s)+∑k=1nsn−k+11[∫⋯∫f(t)(dt)k]t=0± |
| 7 | L [ f ( t ) e − a t ] = F ( s + a ) L[f(t)e^{-at}]=F(s + a) L[f(t)e−at]=F(s+a) |
| 8 | L [ f ( t − a ) ⋅ 1 ( t − a ) ] = e − a s ⋅ F ( s ) L[f(t - a)\cdot1(t - a)]=e^{-as}\cdot F(s) L[f(t−a)⋅1(t−a)]=e−as⋅F(s) |
| 9 | L [ t f ( t ) ] = − d F ( s ) d s L[tf(t)]=-\frac{\mathrm{d}F(s)}{\mathrm{d}s} L[tf(t)]=−dsdF(s) |
| 10 | L [ 1 t f ( t ) ] = ∫ s ∞ F ( s ) d s L\left[\frac{1}{t}f(t)\right]=\int_{s}^{\infty}F(s)\mathrm{d}s L[t1f(t)]=∫s∞F(s)ds |
| 11 | L [ f ( t a ) ] = a F ( a s ) L\left[f\left(\frac{t}{a}\right)\right]=aF(as) L[f(at)]=aF(as) |
除此之外,对于分式象函数,常采用留数定理进行反变换。
传递函数
概念和性质
定义:线性定常系统的传递函数为零初始条件下,输出量的拉普拉斯变换
C
(
s
)
C(s)
C(s) 与输入量的拉普拉斯变换之比。数学表达式为:
G
(
s
)
=
C
(
s
)
R
(
s
)
=
b
0
s
m
+
b
1
s
m
−
1
+
⋯
+
b
m
−
1
s
+
b
m
a
0
s
n
+
a
1
s
n
−
1
+
⋯
+
a
n
−
1
s
+
a
n
G(s) = \frac{C(s)}{R(s)} = \frac{b_0 s^m + b_1 s^{m-1} + \cdots + b_{m-1} s + b_m}{a_0 s^n + a_1 s^{n-1} + \cdots + a_{n-1} s + a_n}
G(s)=R(s)C(s)=a0sn+a1sn−1+⋯+an−1s+anb0sm+b1sm−1+⋯+bm−1s+bm
典型环节的传递函数
- 比例环节: G ( s ) = K G(s) = K G(s)=K
- 惯性环节: G ( s ) = 1 T s + 1 G(s) = \frac{1}{Ts + 1} G(s)=Ts+11(按指数上升的环节,如 R-C 电路、R-L 电路等)
- 积分环节: G ( s ) = 1 T s G(s) = \frac{1}{Ts} G(s)=Ts1
- 微分环节: G ( s ) = T s G(s) = Ts G(s)=Ts
- 比例微分环节: G ( s ) = K c ( 1 + T s ) G(s) = K_c (1 + Ts) G(s)=Kc(1+Ts)
- 振荡环节: G ( s ) = ω n 2 s 2 + 2 ω n ζ s + ω n 2 G(s) = \frac{\omega_n^2}{s^2 + 2 \omega_n \zeta s + \omega_n^2} G(s)=s2+2ωnζs+ωn2ωn2
- 延滞环节: G ( s ) = e − τ s G(s) = e^{-\tau s} G(s)=e−τs
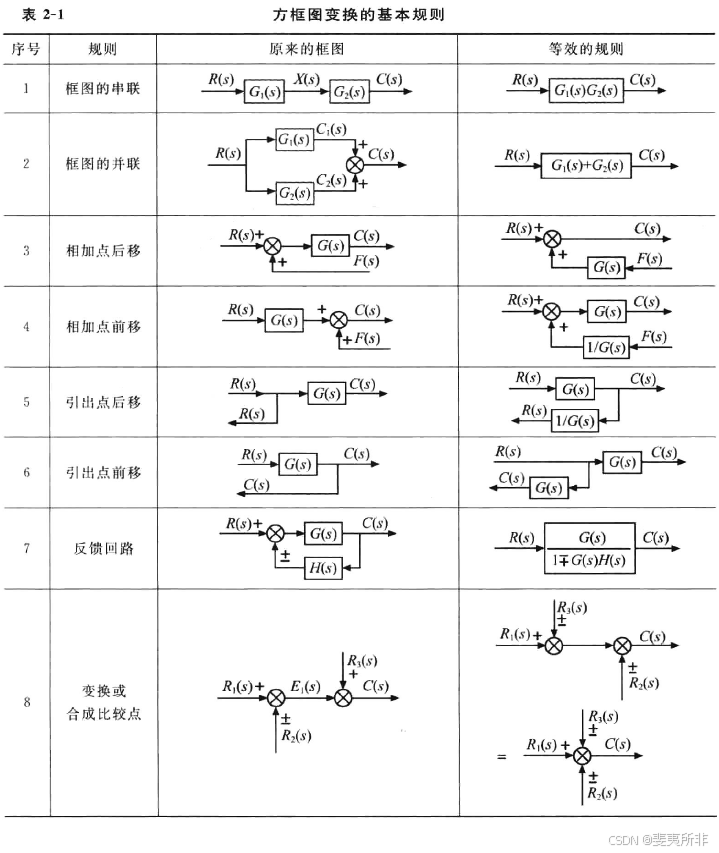
结构图
结构图组成和作用
组成:结构图采用单元方框表示传递函数,信号线表示信号传递方向,引出点对信号进行引出,综合点对信号进行加减运算。
作用:一方面直观表达出系统各环节的联系,另一方面通过结构图的简化,容易得到系统总的传递函数。
结构图的等效变换
信号流图
信号流图的组成与作用
组成:用小圆圈表示的节点具有输入输出作用,连接两个节点的支路附带传递函数,从某一节点穿过各支路到另一节点的路径称为通路。
作用:与结构图基本类似,结构图简化求传递函数变成了信号流图通过梅逊公式求传递函数。
梅逊公式
公式:
G
(
s
)
=
1
Δ
∑
k
=
1
n
P
k
Δ
k
G(s) = \frac{1}{\Delta} \sum_{k=1}^{n} P_k \Delta_k
G(s)=Δ1k=1∑nPkΔk
- P P P 表示信号流图中的前向通路(前向通路:从输入节点到输出节点且通过任何节点不多于一次的通路)。
-
Δ
=
1
−
∑
L
i
+
∑
L
i
L
j
−
∑
L
i
L
j
L
k
⋯
\Delta = 1 - \sum L_i + \sum L_i L_j - \sum L_i L_j L_k \cdots
Δ=1−∑Li+∑LiLj−∑LiLjLk⋯
- 第一项的 L L L 为每一个不相同回路经过的传递函数(回路:起点与终点重合且与任何节点相交不超过一次的通路)。
- 第二项的 L L L 为两两互不接触的回路经过的传递函数。
- 第三项的 L L L 为三三互不接触的回路经过的传递函数。依次类推。
- Δ k \Delta_k Δk 为 Δ \Delta Δ 去掉与第 k k k 条前向通道相接触的回路传递函数的剩余部分,或者去掉相接触回路后再按照 Δ \Delta Δ 运算规律得到的式子。
闭环控制系统的传递函数
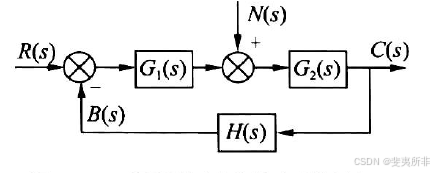
闭环控制系统典型结构
开环传递函数
闭环回路在
B
(
s
)
B(s)
B(s) 处断开,从输入到
B
(
s
)
B(s)
B(s) 处的传递函数为:
1
+
G
1
(
s
)
G
2
(
s
)
H
(
s
)
1 + G_1(s) G_2(s) H(s)
1+G1(s)G2(s)H(s)
r ( t ) r(t) r(t) 作用下的闭环传递函数
令
n
(
t
)
=
0
n(t) = 0
n(t)=0,
G
B
(
s
)
=
C
(
s
)
R
(
s
)
=
G
1
(
s
)
G
2
(
s
)
1
+
G
1
(
s
)
G
2
(
s
)
H
(
s
)
G_B(s) = \frac{C(s)}{R(s)} = \frac{G_1(s) G_2(s)}{1 + G_1(s) G_2(s) H(s)}
GB(s)=R(s)C(s)=1+G1(s)G2(s)H(s)G1(s)G2(s)
n ( t ) n(t) n(t) 作用下系统的闭环传递函数
令
r
(
t
)
=
0
r(t) = 0
r(t)=0,
G
B
n
(
s
)
=
C
n
(
s
)
N
(
s
)
=
G
2
(
s
)
1
+
G
1
(
s
)
G
2
(
s
)
H
(
s
)
G_{Bn}(s) = \frac{C_n(s)}{N(s)} = \frac{G_2(s)}{1 + G_1(s) G_2(s) H(s)}
GBn(s)=N(s)Cn(s)=1+G1(s)G2(s)H(s)G2(s)
系统的总输出
C ∑ ( s ) = C ( s ) + C n ( s ) C_{\sum}(s) = C(s) + C_n(s) C∑(s)=C(s)+Cn(s)
闭环系统的误差传递函数
在
r
(
t
)
r(t)
r(t) 作用下,
G
B
e
(
s
)
=
E
(
s
)
R
(
s
)
=
1
1
+
G
1
(
s
)
G
2
(
s
)
H
(
s
)
G_{Be}(s) = \frac{E(s)}{R(s)} = \frac{1}{1 + G_1(s) G_2(s) H(s)}
GBe(s)=R(s)E(s)=1+G1(s)G2(s)H(s)1
在
n
(
t
)
n(t)
n(t) 作用下,
G
B
e
n
(
s
)
=
E
n
(
s
)
N
(
s
)
=
−
G
2
(
s
)
H
(
s
)
1
+
G
1
(
s
)
G
2
(
s
)
H
(
s
)
G_{Ben}(s) = \frac{E_n(s)}{N(s)} = \frac{-G_2(s) H(s)}{1 + G_1(s) G_2(s) H(s)}
GBen(s)=N(s)En(s)=1+G1(s)G2(s)H(s)−G2(s)H(s)
系统总误差为:
E
∑
(
s
)
=
G
B
e
(
s
)
R
(
s
)
+
G
B
e
n
(
s
)
N
(
s
)
E_{\sum}(s) = G_{Be}(s) R(s) + G_{Ben}(s) N(s)
E∑(s)=GBe(s)R(s)+GBen(s)N(s)
闭环系统的特征方程
为上述各式的分母:
D
(
s
)
=
1
+
G
1
(
s
)
G
2
(
s
)
H
(
s
)
D(s) = 1 + G_1(s) G_2(s) H(s)
D(s)=1+G1(s)G2(s)H(s)
典型控制系统的数学模型
电路系统
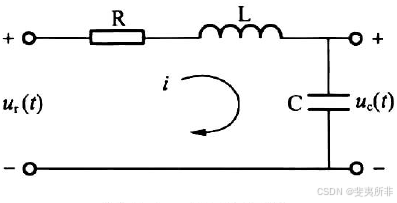
RLC 电路
电路系统中的电容和电感可以应用复阻抗的概念在拉普拉斯变换中进行简化。
复阻抗:一无源支路两端的电压与其中的电流的比值称为该支路的复阻抗。即电感的阻抗在复数域上为 L s Ls Ls,电容的阻抗在复数域上为 1 C s \frac{1}{Cs} Cs1。通过阻抗可以进行复数域上的电路串并联公式快速解出传递函数。
机械系统
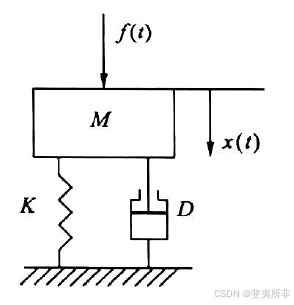
机械位移系统
阻尼器
D
D
D 的力学公式为:
f
(
t
)
=
D
d
x
(
t
)
d
t
f(t) = D \frac{dx(t)}{dt}
f(t)=Ddtdx(t)
弹簧的力学公式为:
f
(
t
)
=
K
x
(
t
)
f(t) = K x(t)
f(t)=Kx(t)
时域分析法
典型输入信号和系统时域性能指标
典型输入信号
在 t ≥ 0 t \geq 0 t≥0 时:
- 脉冲函数: r ( t ) = δ ( t ) r(t) = \delta(t) r(t)=δ(t)
- 阶跃函数: r ( t ) = A r(t) = A r(t)=A
- 斜坡函数: r ( t ) = A t r(t) = At r(t)=At
- 抛物线函数: r ( t ) = 1 2 A t 2 r(t) = \frac{1}{2} A t^2 r(t)=21At2
- 正弦函数: r ( t ) = A sin ( ω t ) r(t) = A \sin(\omega t) r(t)=Asin(ωt)
系统时域性能指标
瞬态响应:系统在典型输入信号作用下,输出量从初始状态到最终状态的响应过程。性能指标包括:
- 最大百分比超调量:最大峰值超过稳态值部分与稳态值之比的百分数
σ % = c ( t p ) − c ( ∞ ) c ( ∞ ) × 100 % \sigma\% = \frac{c(t_p) - c(\infty)}{c(\infty)} \times 100\% σ%=c(∞)c(tp)−c(∞)×100% - 峰值时间 t p t_p tp:阶跃响应超过稳态第一次达到峰值所需要的时间。
- 调节时间 t s t_s ts:响应曲线从零开始一直进入并保持在允许的误差带内( ± 2 % \pm 2\% ±2% 或 ± 5 % \pm 5\% ±5%)所需的最短时间。
- 延迟时间 t d t_d td:阶跃响应曲线上升至第一次达到稳态 50% 所需要的时间。
一阶系统时域分析
单位阶跃响应:
c
(
t
)
=
1
−
e
−
1
T
t
(
t
≥
0
)
c(t) = 1 - e^{-\frac{1}{T} t} \quad (t \geq 0)
c(t)=1−e−T1t(t≥0)
单位脉冲响应:
c
(
t
)
=
1
T
e
−
1
T
t
(
t
≥
0
)
c(t) = \frac{1}{T} e^{-\frac{1}{T} t} \quad (t \geq 0)
c(t)=T1e−T1t(t≥0)
单位斜坡响应:
c
(
t
)
=
(
t
−
T
)
+
T
e
−
1
T
t
(
t
≥
0
)
c(t) = (t - T) + T e^{-\frac{1}{T} t} \quad (t \geq 0)
c(t)=(t−T)+Te−T1t(t≥0)
二阶系统时域分析
二阶系统传递函数标准式
G B ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 G_B(s) = \frac{\omega_n^2}{s^2 + 2 \zeta \omega_n s + \omega_n^2} GB(s)=s2+2ζωns+ωn2ωn2
二阶系统单位阶跃响应
欠阻尼二阶系统单位阶跃输入的瞬态响应指标
- σ % = e − ζ π / 1 − ζ 2 × 100 % \sigma\% = e^{-\zeta \pi / \sqrt{1 - \zeta^2}} \times 100\% σ%=e−ζπ/1−ζ2×100%
- t r = π − ϕ ω d t_r = \frac{\pi - \phi}{\omega_d} tr=ωdπ−ϕ,其中 ϕ = arctan ( 1 − ζ 2 ζ ) \phi = \arctan\left(\frac{\sqrt{1 - \zeta^2}}{\zeta}\right) ϕ=arctan(ζ1−ζ2), ω d = ω n 1 − ζ 2 \omega_d = \omega_n \sqrt{1 - \zeta^2} ωd=ωn1−ζ2
- t p = π ω n 1 − ζ 2 t_p = \frac{\pi}{\omega_n \sqrt{1 - \zeta^2}} tp=ωn1−ζ2π
-
t
s
=
4
ζ
ω
n
t_s = \frac{4}{\zeta \omega_n}
ts=ζωn4,
Δ
=
2
%
\Delta = 2\%
Δ=2%
t s = 3 ζ ω n t_s = \frac{3}{\zeta \omega_n} ts=ζωn3, Δ = 5 % \Delta = 5\% Δ=5%
改善二阶系统性能的措施
- 增加比例—微分环节,使系统阻尼上升,超调量下降,平稳性提高, ω n \omega_n ωn 不发生改变,调节时间缩短,提高响应速度。
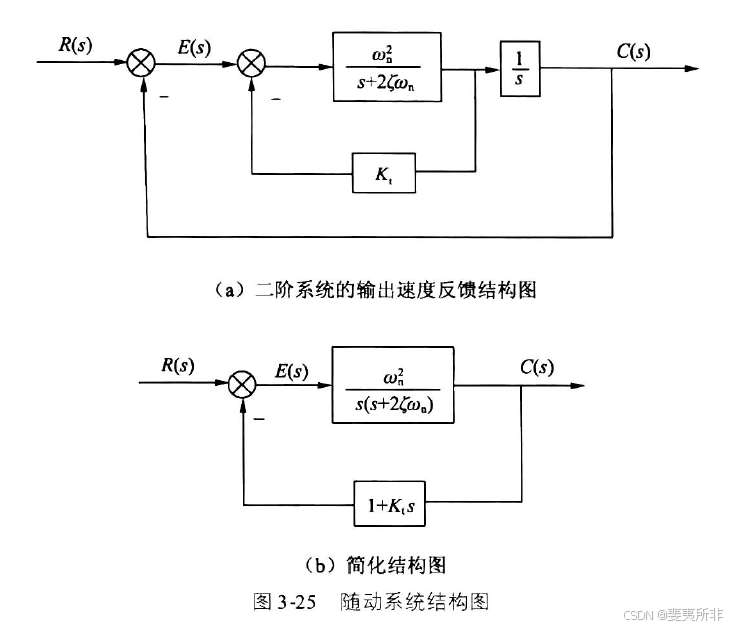
增加速度反馈控制同样能够提高系统阻尼,达到与 1 相同的效果。
优劣:比例-微分结构简单,成本低,但抗干扰能力差;速度反馈抗干扰能力强,但价格高。
高阶系统的时域分析
高阶系统的求解比较困难,通常使用适当方法化为一阶或二阶系统。
-
偶极子化简:当一对零极点的距离比它们的模值小一个数量级时,这对偶极子对系统瞬态响应的影响可以忽略不计,但会影响系统的稳态特性。由此可以忽略偶极子。
-
主导极点直接变化到一阶或二阶:当 ① 一个极点附近没有零点;② 离虚轴距离远远小于其他极点时,单位阶跃的形式和瞬态特性指标主要由它决定。得到主导极点后将其他极零点舍去进行分析。
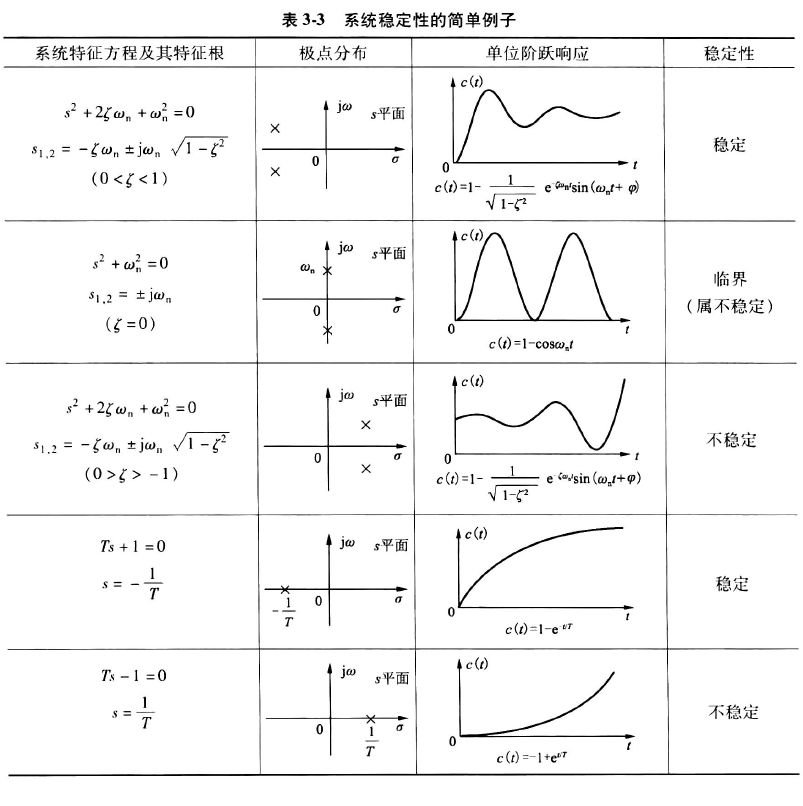
线性系统稳定性分析
线性系统稳定的充分必要条件:系统特征方程式的所有特征根均为负实数或具有负的实部。
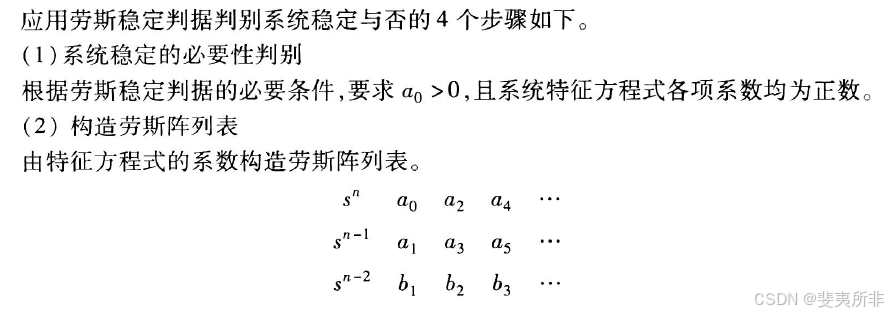
劳斯判据
- 判断系统特征方程式的各项系数是否是正数,如果既存在正数又存在负数,则系统不稳定。
- 应用劳斯阵列表进行判别。
- 当第一列的所有系数都是正数时,系统稳定;反之,系统不稳定,且正负数变换的次数等于系统特征方程式在
s
s
s 右半平面根的个数。
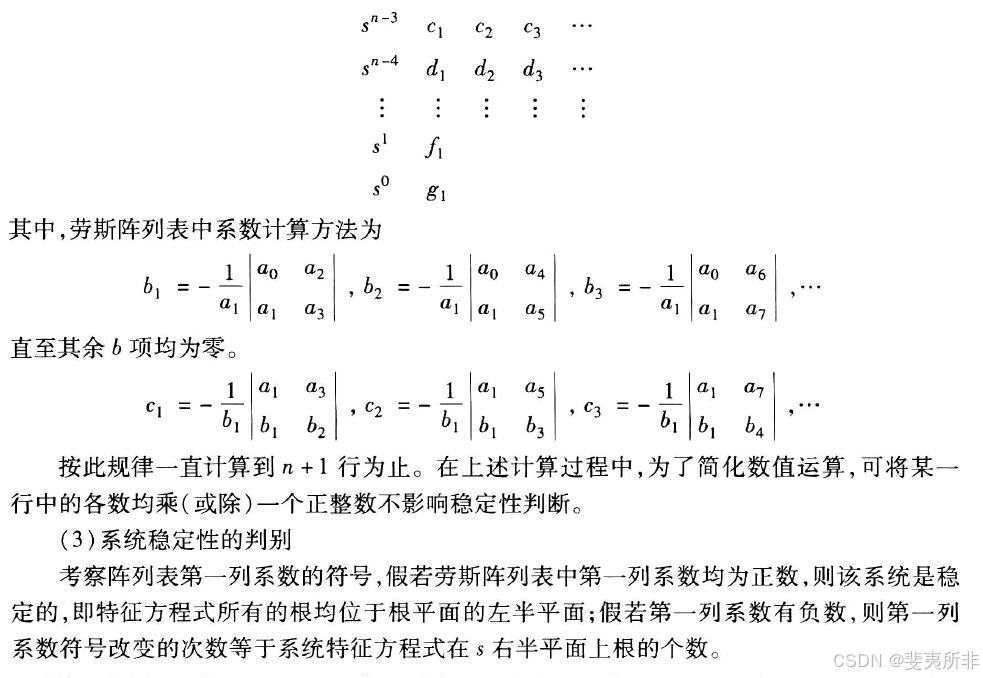
劳斯判据特殊情况
- 第一列中出现零,出现零的那一行有非零元:将第一列的零换成极小的正数 ε \varepsilon ε,使劳斯阵列表能够进行下去。
- 出现某一行系数全为零:利用上一行的系数构成辅助多项式(辅助多项式由偶次幂项构成,最高次为最左列 s s s 的次数),对辅助多项式求导后得到新的多项式,将其系数代替全部为零的那一行,使劳斯阵列继续进行。
劳斯判据的应用
- 稳定裕量的检验:检验离虚轴最近的特征根与虚轴距离。将 s = z − σ s = z - \sigma s=z−σ 带入原特征方程式中,以 z z z 为未知变量判断是否稳定,得到虚轴向左移动 σ \sigma σ 后的系统稳定性。
- 分析系统参数变化对稳定性的影响:由劳斯阵列第一列系数全为正数系统稳定,对第一列含参量施加不等式得到。
线性系统的稳态误差
稳态误差定义
e ( t ) = r ( t ) − b ( t ) e(t) = r(t) - b(t) e(t)=r(t)−b(t)
E ( s ) = R ( s ) − B ( s ) E(s) = R(s) - B(s) E(s)=R(s)−B(s)
将 lim t → ∞ e ( t ) \lim_{t \to \infty} e(t) limt→∞e(t) 定义为稳态误差 e s s e_{ss} ess。由拉普拉斯变换终值定理得到:
e s s = lim s → 0 s E ( s ) e_{ss} = \lim_{s \to 0} s E(s) ess=s→0limsE(s)
典型输入作用下的稳态误差
典型输入下 r ( t ) = 1 , t , 1 2 t 2 r(t) = 1, t, \frac{1}{2} t^2 r(t)=1,t,21t2, R ( s ) = 1 s , 1 s 2 , 1 s 3 R(s) = \frac{1}{s}, \frac{1}{s^2}, \frac{1}{s^3} R(s)=s1,s21,s31。
排除扰动,在参考输入下稳态误差:
E
(
s
)
=
G
B
e
r
R
(
s
)
=
1
1
+
G
k
(
s
)
R
(
s
)
E(s) = G_{Ber} R(s) = \frac{1}{1 + G_k(s)} R(s)
E(s)=GBerR(s)=1+Gk(s)1R(s)
- 直接由 e s s = lim s → 0 s E ( s ) e_{ss} = \lim_{s \to 0} s E(s) ess=lims→0sE(s) 求解。
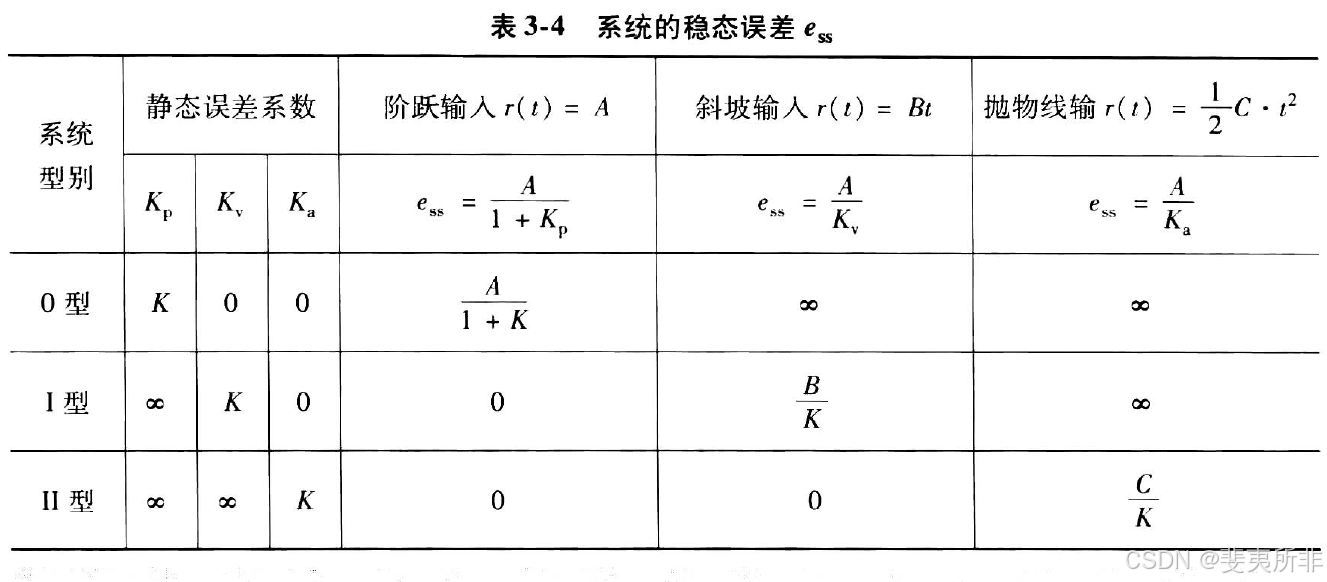
- 由于 R ( s ) → E ( s ) R(s) \to E(s) R(s)→E(s) 的前向通道传函为 G ( s ) = 1 G(s) = 1 G(s)=1,通过简化可以直接使用:img
| 静态 ~~ | 误差 ~~ | 系数 ~~ | 阶跃输入 r ( t ) = A r(t)=A r(t)=A | 斜坡输入 r ( t ) = B t r(t)=Bt r(t)=Bt | 抛物线输入 r ( t ) = 1 2 C ⋅ t 2 r(t)=\frac{1}{2}C · t^{2} r(t)=21C⋅t2 | |
|---|---|---|---|---|---|---|
| 系统 型别 | K p K_{p} Kp | K v K_{v} Kv | K a K_{a} Ka | e s s = A 1 + K p e_{ss}=\frac{A}{1 + K_{p}} ess=1+KpA | e s s = A K v e_{ss}=\frac{A}{K_{v}} ess=KvA | e s s = A K a e_{ss}=\frac{A}{K_{a}} ess=KaA |
| 0 型 | K K K | 0 | 0 | A 1 + K \frac{A}{1 + K} 1+KA | ∞ \infty ∞ | ∞ \infty ∞ |
| I 型 | ∞ \infty ∞ | K K K | 0 | 0 | B K \frac{B}{K} KB | ∞ \infty ∞ |
| II 型 | ∞ \infty ∞ | ∞ \infty ∞ | K K K | 0 | 0 | C K \frac{C}{K} KC |
说明:此表格中
| 静态 | 误差 | 系数 |实际上是一栏| 静态误差系数 |,为防止 html 化后影响公式正常显示,此处没有合并。
K p = lim s → 0 G k ( s ) K v = lim s → 0 s G k ( s ) K a = lim s → 0 s 2 G k ( s ) \begin{aligned} K_p &= \lim_{s \to 0} G_k(s) \\ K_v &= \lim_{s \to 0} s G_k(s) \\ K_a &= \lim_{s \to 0} s^2 G_k(s) \end{aligned} KpKvKa=s→0limGk(s)=s→0limsGk(s)=s→0lims2Gk(s)
按照上面已经得到的结果直接对开环传函操作快速求解。
排除参考输入,在扰动下的稳态误差:
此时,前向通道传函与只讨论参考输入时产生了变化, E ( s ) N ( s ) = − G 2 H 1 + G 1 G 2 H G 2 H \frac{E(s)}{N(s)} = \frac{-G_2 H}{1 + G_1 G_2 H G_2 H} N(s)E(s)=1+G1G2HG2H−G2H,化简得到的效果不大。直接由 e s s = lim s → 0 s E ( s ) e_{ss} = \lim_{s \to 0} s E(s) ess=lims→0sE(s) 求解。
根轨迹分析法
基本概念
根轨迹 (Root-locus)
根轨迹图是闭环系统特征方程的根(即闭环极点)随开环系统传递函数中的某一参数由零变化到无穷大时在 S S S 平面上的变化轨迹。
根轨迹标准形式
K ∗ ∏ j = 1 ( s + z j ) ∏ i = 1 n ( s + p i ) = − 1 \large K^{*}\frac{\prod_{j = 1}^{}\left( s + z_{j} \right)}{\prod_{i = 1}^{n}\left( s + p_{i} \right)}=-1 K∗∏i=1n(s+pi)∏j=1(s+zj)=−1
基本规则
根本规则
对于负反馈闭环系统:

十大作图规则
- 规则一:根轨迹的起点和终点
- 根轨迹的起点为系统的开环极点。
- 根轨迹的终点是系统的开环零点或无穷远点。
- 规则二:根轨迹的分支数
- 根轨迹的分支数 = 特征方程阶次 = 开环极点数。
- 规则三:根轨迹的对称性
- 根轨迹是对称于实轴的连续曲线。
- 规则四:实轴上的根轨迹
- 由幅角原理知,若实轴上某点右侧的开环零、极点个数之和为奇数,则该点为根轨迹上的点。共轭复数开环零极点对实轴上的根轨迹无影响。
- 规则五:根轨迹的渐近线


- 规则六:分离点、汇合点

- 规则七:根轨迹与虚轴的交点
- 将 s = j ω s = j \omega s=jω 代入特征方程中。
- 应用劳斯判据法。
- 规则八:出射角 (Angle of departure) 和入射角 (Angle of arrival)

- 规则九:闭环极点之和
- 当系统满足 n − m ≥ 2 n - m \geq 2 n−m≥2 时,系统闭环极点之和等于开环极点之和。
- 规则十:闭环极点之积
- 当系统满足 n − m ≥ 2 n - m \geq 2 n−m≥2 且有开环零点位于原点时,系统闭环极点之积等于开环极点之积。
作图
基本步骤
- 通过开环传递函数得出闭环传函起始零极点,并依据规则四得到实轴处根轨迹。
- 根据规则五计算出渐近线交点,画出渐近线,并得出渐近线与虚轴交点。
- 根据规则六,得出分离点和汇合点。
- 根据规则七,得出根轨迹与虚轴交点。
- 根据规则八,得出复数零极点入射出射角度。
- 连线。
方法

- 当零极点数量多,且存在开环零点和开环极点之间相距很近,而与其他开环极点间的距离相距很远时,可做如下近似处理:
- 在绘制原点附近的根轨迹时,略去远离原点极点的影响。
- 在绘制远离原点的根轨迹时,略去原点附近的一对零极点的影响。
广义根轨迹绘制
定义:不以根轨迹增益为变量,或非负反馈系统的根轨迹。
- 以非根轨迹增益为变参数的根轨迹
- 需要将方程左端展开成多项式,用不含待讨论参数的各项除方程两端,得到等效开环传递函数。
- 正反馈系统的根轨迹
- 绘制正反馈系统的根轨迹需在负反馈系统根轨迹的画法规则中,与相角条件有关的规则都要作相应的修改。
- 其中规则四:实轴上,某线段右侧的零、极点个数之和为偶数,则此线段为根轨迹的一部分。


- 非最小相位系统的根轨迹
-
首先,将非最小相位系统的开环传函写成标准形式:
G ( s ) H ( s ) = K ∗ ∏ j = 1 m ∣ s − z j ∣ ∏ i = 1 n ∣ s − p i ∣ G\left( s \right)H\left( s \right)={{K}^{*}}\frac{\prod\limits_{j=1}^{m}{\left| s-{{z}_{j}} \right|}}{\prod\limits_{i=1}^{n}{\left| s-{{p}_{i}} \right|}} G(s)H(s)=K∗i=1∏n∣s−pi∣j=1∏m∣s−zj∣ -
使上式分子分母中 s s s 的最高次幂系数为正。若有负号提出,则按照正反馈根轨迹规则作图,否则仍按负反馈根轨迹规则作图。
-
基于根轨迹的系统性能分析
对于二阶线性系统,等 ζ \zeta ζ 线有:
ζ = cos β \zeta =\cos \beta ζ=cosβ
主导极点的概念
闭环主导极点定义:在系统的时间响应过程中起主要作用的闭环极点,它们离虚轴的距离小于其他闭环极点的 1 / 5 1/5 1/5,并且在其附近没有闭环零点。
在 ζ \zeta ζ 有要求下求三阶系统(可降阶为二阶系统)的性能指标:
-
由二阶系统 ω d = ω n 1 − ζ 2 \omega_d = \omega_n \sqrt{1 - \zeta^2} ωd=ωn1−ζ2, σ = − ζ ω n \sigma = -\zeta \omega_n σ=−ζωn
得到
ω d = − 1 − ζ 2 ζ σ \omega_d = -\frac{\sqrt{1 - \zeta^2}}{\zeta} \sigma ωd=−ζ1−ζ2σ。 -
带入特征方程解出 x , y , k x, y, k x,y,k,得到降阶后的闭环系统,得到 ω n \omega_n ωn 再得到系统性能指标。
增加开环零点对根轨迹的影响
增加开环极点后,根轨迹渐近线的重心将沿实轴向右移动。
增加开环零点后,将原来系统的两条主要根轨迹拉向了左半 s s s 平面,使原来稳定程度很低的系统变为具有良好稳定性的系统。
线性系统的频域分析
5-1 频域响应的基本概念

5-2 频率特性的图示方法
5.2.1 极坐标图
极坐标图 (Polar plots) 又称幅相特性曲线、幅相图或奈奎斯特 (Nyquist) 图。
典型环节的极坐标图:
-
比例环节:
G ( s ) = K G\left( s \right)=K G(s)=K
-
积分环节:
G ( s ) = 1 s G\left( s \right)=\frac{1}{s} G(s)=s1
-
纯微分环节:
G ( s ) = s G\left( s \right)=s G(s)=s
-
惯性环节:
G ( s ) = 1 T s + 1 \large G\left( s \right)=\frac{1}{T_s+1} G(s)=Ts+11
-
振荡环节:
G ( s ) = ω n 2 s 2 + 2 ξ ω n s + ω n 2 \large G(s)=\frac{\omega_{n}^{2}}{s^{2}+2 \xi\omega_{n}s + \omega_{n}^{2}} G(s)=s2+2ξωns+ωn2ωn2

当阻尼比较小时,会产生谐振,谐振峰值:
M r ( M r > 1 ) {{M}_{r}}\left( {{M}_{r}}>1 \right) Mr(Mr>1)
和谐振频率:
ω r {{\omega }_{r}} ωr
由幅频特性的极值方程解出:
d d ω ∣ G ( j ω ) ∣ = d d ω [ ( 1 − ω 2 ω n 2 ) 2 + 4 ξ 2 ω 2 ω n 2 ] = 0 \large\frac{d}{d\omega} \left| G(j\omega) \right| = \frac{d}{d\omega} \left[ \left( 1 - \frac{\omega^2}{\omega_n^2} \right)^2 + 4\xi^2 \frac{\omega^2}{\omega_n^2} \right] = 0 dωd G(jω) =dωd[(1−ωn2ω2)2+4ξ2ωn2ω2]=0
得到:
ω r = ω n 1 − 2 ξ 2 ( 0 < ξ < 1 2 ) \large\omega_r = \omega_n\sqrt{1 - 2\xi^2} \quad (0 < \xi < \frac{1}{\sqrt{2}}) ωr=ωn1−2ξ2(0<ξ<21)
带入得:
M r = ∣ G ( j ω r ) ∣ = 1 2 ξ 1 − ξ 2 ( 0 < ξ < 1 2 ) \large M_r = \left| G(j\omega_r) \right| = \frac{1}{2\xi\sqrt{1 - \xi^2}} \quad (0 < \xi < \frac{1}{\sqrt{2}}) Mr= G(jωr) =2ξ1−ξ21(0<ξ<21)
-
一阶微分环节:
G ( s ) = T s + 1 \large G\left( s \right)={T_s+1} G(s)=Ts+1
-
二阶微分环节:
G ( s ) = T 2 s 2 + 2 ξ T s + 1 \large G\left( s \right)={{T}^{2}}{{s}^{2}}+2\xi Ts+1 G(s)=T2s2+2ξTs+1
-
延滞环节:
G ( s ) = e − τ s \large G\left( s \right)={{e}^{-\tau s}} G(s)=e−τs
-
不稳定环节:
G ( s ) = 1 − T s + 1 \large G\left( s \right)=\frac{1}{-T_s+1} G(s)=−Ts+11
开环系统的幅频特性曲线画法
- 得到系统传函模值函数和相位函数。
- 确定 ω = 0 \omega = 0 ω=0 时和 ω = ∞ \omega = \infty ω=∞ 时的对应点。
- 当起始模值为无穷时,需要计算渐进性。当与虚轴、实轴有交点时,需要计算交点值。
- 画出曲线。
对数坐标轴
对数频率特性曲线又叫对数坐标图或波德图 (Bode Diagram),它是将幅频特性和相频特性分别绘制在两个不同的坐标平面上。
-
根据已知条件写出标准开环传函,其中二阶震荡可写成:
G ( j ω ) = 1 ( j ω ω n ) 2 + 2 ξ j ω ω n + 1 \large G(j\omega)=\frac{1}{(\frac{j\omega}{\omega_n})^2 + 2\xi\frac{j\omega}{\omega_n}+1} G(jω)=(ωnjω)2+2ξωnjω+11
-
根据转折点确定伯德图的横轴分布,计算 ω = 1 \omega = 1 ω=1 时的幅值,基本确定伯德图的纵轴分布。
-
从前往后依次根据转折点添加典型环节渐近线。
最小相位系统
如果系统开环传递函数在复平面 s s s 的右半平面既没有极点,也没有零点,则称该传递函数为最小相位传递函数,具有最小相位传递函数的系统称为最小相位系统。
具有相同幅频特性的系统,最小相位系统的相角变化范围最小,而任何非最小相位系统的相角变化范围都大于最小相位系统的相位变化范围。

若存在谐振峰值,即存在振荡环节,此时应根据:
20 lg M r = 20 lg 1 2 ξ 1 − ξ 2 20\lg Mr=20\lg \frac{1}{2\xi \sqrt{1-{{\xi }^{2}}}} 20lgMr=20lg2ξ1−ξ21
求出 ζ \zeta ζ。( 0 < ξ < 0.707 0<\xi <0.707 0<ξ<0.707)
奈奎斯特稳定判据
F ( s ) = 1 + G ( s ) H ( s ) = 1 + M ( s ) N ( s ) = N ( s ) + M ( s ) N ( s ) F(s)=1 + G(s)H(s)=1+\frac{M(s)}{N(s)}=\frac{N(s)+M(s)}{N(s)} F(s)=1+G(s)H(s)=1+N(s)M(s)=N(s)N(s)+M(s)

当 G H = M ( s ) N ( s ) GH = \frac{M(s)}{N(s)} GH=N(s)M(s) 时,将 A A A 点( − 1 , j 0 -1, j0 −1,j0)看作原点,可以认为 g h gh gh 绕 A A A 点转就是 F ( s ) F(s) F(s) 绕原点转。当 F ( s ) F(s) F(s) 右侧有 P P P 个极点, Z Z Z 个零点时, g h gh gh 绕 A A A 点顺时针转 N = Z − P N = Z - P N=Z−P 圈。
闭环稳定的条件是特征方程的特征根不在右侧,即 F ( s ) F(s) F(s) 在右侧无零点,即 Z = 0 Z = 0 Z=0。通过作图可以得到 N N N 值,通过观察传函可以得到 P P P 值。若 P + N = 0 P + N = 0 P+N=0,则代表系统稳定。
可以知道如果 N > 0 N > 0 N>0,即 g h gh gh 顺时针转圈,立刻得到系统不稳定。
其中:
- 如果传函包括积分环节,要对中间的小半圆的映射绘制,有 k k k 个积分环节就从 0 − 0^- 0− 到 0 + 0^+ 0+ 顺时针转动 18 0 ∘ × k 180^\circ \times k 180∘×k 角度。
- 当 g h gh gh 曲线穿过 ( − 1 , j 0 -1, j0 −1,j0) 时,代表系统临界稳定。
相对稳定性
对于最小相位系统,相对稳定性可以用幅值裕度和相角裕度来描述。
- 相角裕度:与以原点为中心单位圆交点(称作幅值穿越频率 ω c \omega_c ωc)时的相位角度 + 18 0 ∘ +180^\circ +180∘ 得到的角度作为相角裕度,越大越稳定。
- 幅值裕度:与负实轴交点(称作相位穿越频率 ω g \omega_g ωg)时的模值的倒数或者 − 20 log ∣ G ∣ -20 \log |G| −20log∣G∣,越大越稳定,小于 1 不稳定。
线性系统的校正方法
PID 调节器
- PD 控制器:
G c ( s ) = K P + K D s G_{c}(s) = K_{P} + K_{D}s Gc(s)=KP+KDs
- PI 控制器:
G c ( s ) = K p + K I s = K p s + K I s = K p ( 1 + 1 T i s ) , T i = K p K I G_{c}(s)=K_{p}+\frac{K_{I}}{s}=\frac{K_{p}s + K_{I}}{s}=K_{p}\left(1+\frac{1}{T_{i}s}\right),\ T_{i}=\frac{K_{p}}{K_{I}} Gc(s)=Kp+sKI=sKps+KI=Kp(1+Tis1), Ti=KIKp
- 比例 - 积分 - 微分 (PID) 调节器:
G c ( s ) = K P + K D s + K I s = K D s 2 + K P s + K I s G_{c}(s)=K_{P}+K_{D}s+\frac{K_{I}}{s}=\frac{K_{D}s^{2}+K_{P}{s} + K_{I}}{s} Gc(s)=KP+KDs+sKI=sKDs2+KPs+KI
串联校正 - 超前校正
超前校正适合有一定相位角度且 ω c \omega_{c} ωc 处斜率较小的系统。
G c ′ ( s ) = a G c ( s ) = 1 + a T s 1 + T s G_{c}'(s)=aG_{c}(s)=\frac{1 + aTs}{1 + Ts} Gc′(s)=aGc(s)=1+Ts1+aTs
无源超前校正装置附带 1 a \frac{1}{a} a1 的幅值衰减,应该再加一个放大器 a a a,其中 a > 0 a > 0 a>0。
有:
φ m = arcsin a − 1 a + 1 \varphi_{m}=\arcsin\frac{a - 1}{a + 1} φm=arcsina+1a−1
ω m = ω c = 1 T a \omega_{m}=\omega_{c}=\frac{1}{T\sqrt{a}} ωm=ωc=Ta1
L c ( ω m ) = 20 lg ∣ a G c ( j ω ) ∣ = 10 lg a L_{c}(\omega_{m}) = 20\lg|aG_{c}(j\omega)| = 10\lg a Lc(ωm)=20lg∣aGc(jω)∣=10lga
超前校正步骤
-
根据稳态性能要求,确定开环放大系数 K K K。
-
利用求得的 K K K 值和原系统的传递函数,计算未校正系统的相角裕度;绘制原系统的伯德图。
-
利用已校正系统希望的剪切频率 ω c \omega_{c} ωc 计算超前网络参数 a a a 和 T T T;
在题目未给出 ω c \omega_{c} ωc 取值时:
- 3.1 可以通过需要设定的角度: γ = φ m + γ 0 ( ω c ) \gamma=\varphi_{m}+\gamma_{0}(\omega_{c}) γ=φm+γ0(ωc),其中右边第二项 γ 0 ( ω c ) \gamma_{0}(\omega_{c}) γ0(ωc) 可以在未校正前稍减得到预定的 φ m \varphi_{m} φm ,再通过 φ m = arcsin a − 1 a + 1 \varphi_{m}=\arcsin\frac{a - 1}{a + 1} φm=arcsina+1a−1 得到 a a a。
- 3.2 通过 L c ( ω m ) = 20 lg ∣ a G c ( j ω ) ∣ = 10 lg a L_{c}(\omega_{m}) = 20\lg|aG_{c}(j\omega)| = 10\lg a Lc(ωm)=20lg∣aGc(jω)∣=10lga 与原系统构造等式得到校正后 ω c \omega_{c} ωc(即系统需要设定的 ω c \omega_{c} ωc),再通过 ω m = ω c = 1 T a \omega_{m}=\omega_{c}=\frac{1}{T\sqrt{a}} ωm=ωc=Ta1 计算 T T T。
- 3.3 算出校正后的相角,与设定比较。
在题目给出 ω c \omega_{c} ωc 时:
-
3.1 通过 L c ( ω m ) = 20 lg ∣ a G c ( j ω ) ∣ = 10 lg a L_{c}(\omega_{m}) = 20\lg|aG_{c}(j\omega)| = 10\lg a Lc(ωm)=20lg∣aGc(jω)∣=10lga 算出 a a a ,通过 ω m = ω c = 1 T a \omega_{m}=\omega_{c}=\frac{1}{T\sqrt{a}} ωm=ωc=Ta1 算出 T T T,通过 φ m = arcsin a − 1 a + 1 \varphi_{m}=\arcsin\frac{a - 1}{a + 1} φm=arcsina+1a−1 算出 φ m \varphi_{m} φm。
-
3.2 算出校正后的相角,与设定比较。
滞后校正
滞后校正适合相角较小或 ω c \omega_c ωc 处斜率较大的系统。
G c ( s ) = 1 + b T s 1 + T s ( b < 1 ) G_{c}(s)=\frac{1 + bTs}{1 + Ts} \quad (b < 1) Gc(s)=1+Ts1+bTs(b<1)
步骤:
-
根据稳态误差要求,确定开环增益 K K K。
-
利用已确定的开环增益,画出未校正系统的对数频率特性,确定未校正系统的剪切频率 ω c o \omega_{co} ωco,相角裕度 γ 0 \gamma_0 γ0 和幅值裕度 K g K_g Kg。
-
根据相角裕度 γ \gamma γ 要求,确定校正后系统剪切频率 ω c \omega_c ωc。考虑到滞后网络在新的剪切频率 ω c \omega_c ωc 处会产生一定的相角滞后:
φ c ( ω c ) {\varphi }_{c}({\omega }_{c}) φc(ωc)
因此下式成立:
γ = γ 0 ( ω c ) + φ c ( ω c ) \gamma ={\gamma }_{0}({\omega }_{c}) + {\varphi }_{c}({\omega }_{c}) γ=γ0(ωc)+φc(ωc)
φ c ( ω c ) {\varphi }_{c}({\omega }_{c}) φc(ωc) 是滞后网络在 ω c \omega_c ωc 处的相角,在确定 ω c \omega_c ωc 前可取为 − 6 ∘ -6^{\circ} −6∘。
-
当 γ \gamma γ 与 φ c \varphi_c φc 为已知数,确定 γ 0 \gamma_0 γ0 后得到 ω c \omega_c ωc。
-
得到 ω c \omega_c ωc 后由:
20 lg b + L 0 ( ω c ) = 0 \large 20\lg b + L_0({\omega }_{c}) = 0 20lgb+L0(ωc)=0
得到 b b b,由:
1 b T = ( 1 5 ∼ 1 10 ) ω c \large\frac{1}{bT}=\left( \frac{1}{5}\sim \frac{1}{10} \right){\omega }_{c} bT1=(51∼101)ωc
得到 T T T。
-
算出校正后的相角,与设定比较。
第七章 离散控制系统
7.1 离散系统的基本概念
离散控制系统 (Discrete Control System) 又称为采样控制系统,与连续控制系统的根本区别在于:连续系统中任一点上的信号都是以时间为变量的连续函数,而在离散系统中,则有一处或几处的信号是时间的离散函数。
数字控制系统 (Digital Control System):系统中具有数字控制器或数字计算机的自动控制系统。

7.2 采样过程与采样定理
7.2.1 采样过程及其数学描述
由于 x ( t ) x(t) x(t) 的数值仅在采样瞬时才有意义,可表示为:
x ∗ ( t ) = ∑ k = 0 ∞ x ( k T ) δ ( t − k T ) \large x^*(t)=\sum_{k = 0}^{\infty}x(kT)\delta(t - kT) x∗(t)=∑k=0∞x(kT)δ(t−kT)
7.2.2 采样定理
Shannon 定理:如果对一个具有有限频谱 ( − ω max < ω < ω max -\omega_{\text{max}} < \omega < \omega_{\text{max}} −ωmax<ω<ωmax) 的连续信号采样,当采样角频率:
ω s ≥ 2 ω max {{\omega }_{s}}\ge 2{{\omega }_{\max }} ωs≥2ωmax
或
f s ≥ 2 f max {{f}_{s}}\ge 2{{f}_{\max }} fs≥2fmax
由采样得到的离散信号能够无失真地恢复到原来的连续信号。
7.2.3 信号的恢复

阶保持器的传递函数:
G h ( s ) = 1 − e − s T s \large {{G}_{h}}\left( s \right)=\frac{1-{{e}^{-sT}}}{s} Gh(s)=s1−e−sT
零阶保持器相对于其他类型的保持器具有最小的相位滞后,且容易实现,因此在离散控制系统中应用最为广泛。
7.3 Z 变换理论
7.3.1 Z 变换定义和性质
L [ x ∗ ( t ) ] = X ∗ ( s ) = ∑ k = 0 + ∞ x ( k T ) e − k T s L\left[x^{*}(t)\right]=X^{*}(s)=\sum_{k = 0}^{+\infty}x(kT)e^{-kTs} L[x∗(t)]=X∗(s)=∑k=0+∞x(kT)e−kTs
因复变量 s s s 包含在指数函数 e − k T e^{-kT} e−kT 中不便计算,故引进一个新变量 z z z,即:
z = e T s z = e^{Ts} z=eTs
得到:
X ( z ) = ∑ k = 0 + ∞ x ( k T ) z − k X(z)=\sum_{k = 0}^{+\infty}x(kT)z^{-k} X(z)=∑k=0+∞x(kT)z−k
7.3.1-2 Z 变换的性质
-
线性定理 (Linear Theorem):
Z [ a 1 x 1 ( t ) ± a 2 x 2 ( t ) ] = a 1 X 1 ( z ) + a 2 X 2 ( z ) Z\left[a_{1}x_{1}(t)\pm a_{2}x_{2}(t)\right]=a_{1}X_{1}(z)+a_{2}X_{2}(z) Z[a1x1(t)±a2x2(t)]=a1X1(z)+a2X2(z)
-
时移定理 (Time - Shift Theorem):
Z [ x ( t + k T ) ] = z k [ X ( z ) − ∑ r = 0 k − 1 x ( r T ) z − r ] Z[x(t + kT)]=z^{k}\left[X(z)-\sum_{r = 0}^{k - 1}x(rT)z^{-r}\right] Z[x(t+kT)]=zk[X(z)−∑r=0k−1x(rT)z−r]
Z [ x ( t − k T ) ] = z − k X ( z ) Z[x(t - kT)]=z^{-k}X(z) Z[x(t−kT)]=z−kX(z)
-
初值定理 (Initial - Value Theorem):
l i m t → 0 x ( t ) = l i m z → ∞ X ( z ) lim _{t \to 0}x(t)=lim _{z \to \infty}X(z) limt→0x(t)=limz→∞X(z)
-
终值定理 (Final Value Theorem):
l i m t → ∞ x ( t ) = l i m z → 1 ( z − 1 ) X ( z ) lim _{t \to \infty}x(t)=lim _{z \to 1}(z - 1)X(z) limt→∞x(t)=limz→1(z−1)X(z)
7.3.2 Z 变换方法
-
级数求和法:离散函数 x ∗ ( t ) x^*(t) x∗(t) 的 Z 变换的级数展开形式,将其改写成:
X ( z ) = x ( 0 ) + x ( T ) z − 1 + x ( 2 T ) z − 2 + ⋯ + x ( k T ) z − k + ⋯ X(z)=x(0)+x(T)z^{-1}+x(2T)z^{-2}+\cdots+x(kT)z^{-k}+\cdots X(z)=x(0)+x(T)z−1+x(2T)z−2+⋯+x(kT)z−k+⋯
需要知道时域函数,用得较少。
-
部分分式法:由拉普拉斯变换 X ( s ) X(s) X(s) 转变到 z z z 变换函数。
先:
X ( s ) = ∑ i = 1 n A i s + s i \large X(s)=\sum_{i = 1}^{n}\frac{A_{i}}{s + s_{i}} X(s)=∑i=1ns+siAi
再由:
X ( z ) = ∑ i = 1 n A i z z − e − s i T \large X(z)=\sum_{i = 1}^{n}\frac{A_{i}z}{z - e^{-s_{i}T}} X(z)=∑i=1nz−e−siTAiz
得到其 z z z 变换。
-
留数计算法:由拉普拉斯变换 X ( s ) X(s) X(s) 转变到 z z z 变换函数。
X ( z ) = ∑ i = 1 n r e s [ z X ( s ) z − e T s ] s = − s i \large X(z)=\sum_{i = 1}^{n}res\left[\frac{zX(s)}{z - e^{Ts}}\right]_{s=-s_{i}} X(z)=∑i=1nres[z−eTszX(s)]s=−si
需要记忆的一些
L \mathcal{L} L 变换
| 变换类型 | 表达式 | 变换结果 |
|---|---|---|
| 正变换 | L { δ ( t − k T ) } \mathcal{L}\{\delta(t - kT)\} L{δ(t−kT)} | e − k T s e^{-kTs} e−kTs |
| 反变换 | L − 1 { 1 s + a } \mathcal{L}^{-1}\left\{\frac{1}{s + a}\right\} L−1{s+a1} | e − a t e^{-at} e−at |
| 反变换 | L − 1 { 1 s − ln α T } \mathcal{L}^{-1}\left\{\frac{1}{s - \frac{\ln \alpha}{T}}\right\} L−1{s−Tlnα1} | e ln α T t = α t / T ( 或 α k 当 t = k T ) e^{\frac{\ln \alpha}{T} t} = \alpha^{t/T} \quad (\text{或 } \alpha^k \text{ 当 } t = kT) eTlnαt=αt/T(或 αk 当 t=kT) |
z z z 变换
| 变换类型 | 表达式 | 变换结果 ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ |
|---|---|---|
| 正变换 | Z { δ [ n − k ] } \mathcal{Z}\{\delta[n - k]\} Z{δ[n−k]} | z − k z^{-k} z−k |
| 正变换 | Z { e − a T n } = Z { ( e − a T ) n } \mathcal{Z}\{e^{-aTn}\} = \mathcal{Z}\{(e^{-aT})^n\} Z{e−aTn}=Z{(e−aT)n} | z z − e − a T \frac{z}{z - e^{-aT}} z−e−aTz |
| 反变换 | Z − 1 { z z − e − a T } \mathcal{Z}^{-1}\left\{\frac{z}{z - e^{-aT}}\right\} Z−1{z−e−aTz} | ( e − a T ) n (e^{-aT})^n (e−aT)n |
| 反变换 | Z − 1 { z z − a } \mathcal{Z}^{-1}\left\{\frac{z}{z - a}\right\} Z−1{z−az} | a n a^n an |
7.3.4 Z 反变换方法
-
长除法
长除法得到:
X ( z ) = c 0 + c 1 z − 1 + c 2 z − 2 + ⋯ + c k z − k + ⋯ X(z)=c_{0}+c_{1}z^{-1}+c_{2}z^{-2}+\cdots+c_{k}z^{-k}+\cdots X(z)=c0+c1z−1+c2z−2+⋯+ckz−k+⋯
再由拉氏反变换,求出原函数的脉冲序列:
x ∗ ( t ) = ∑ k = 0 ∞ C k δ ( t − k T ) x *(t)=\sum_{k = 0}^{\infty}C_{k}\delta(t - kT) x∗(t)=∑k=0∞Ckδ(t−kT)
-
部分分式法
X ( z ) z = ∑ i = 1 n A i z − z i \large \frac{X(z)}{z}=\sum_{i = 1}^{n}\frac{A_{i}}{z - z_{i}} zX(z)=∑i=1nz−ziAi
再由:

得到时域函数值。
-
留数计算法
由:
x ( k T ) = ∑ r e s [ X ( z ) z k − 1 ] x(kT)=\sum res\left[X(z)z^{k - 1}\right] x(kT)=∑res[X(z)zk−1]
计算得。
7.4 离散控制系统的数学描述
7.4.1 线性常系数差分方程
-
差分方程
c ( k ) + a 1 c ( k − 1 ) + ⋯ + a n c ( k − n ) = b 0 r ( k ) + b 1 r ( k − 1 ) + ⋯ + b m r ( k − m ) c(k)+a_{1}c(k - 1)+\cdots+a_{n}c(k - n)=b_{0}r(k)+b_{1}r(k - 1)+\cdots+b_{m}r(k - m) c(k)+a1c(k−1)+⋯+anc(k−n)=b0r(k)+b1r(k−1)+⋯+bmr(k−m)
到 z z z 变换:
C ( z ) R ( z ) = G ( z ) = b 0 + b 1 z − 1 + ⋯ + b m z − m 1 + a 1 z − 1 + ⋯ + a n z − n \large\frac{C(z)}{R(z)}=G(z)=\frac{b_{0}+b_{1}z^{-1}+\cdots+b_{m}z^{-m}}{1+a_{1}z^{-1}+\cdots+a_{n}z^{-n}} R(z)C(z)=G(z)=1+a1z−1+⋯+anz−nb0+b1z−1+⋯+bmz−m
-
给定初值时,
C ( z ) = 1 z 2 + 3 z + 2 R ( z ) = 1 z 2 + 3 z + 2 = z − 1 ( z z + 1 − z z + 2 ) \large C(z)=\frac{1}{z^{2}+3z + 2}R(z)=\frac{1}{z^{2}+3z + 2}=z^{-1}\left(\frac{z}{z + 1}-\frac{z}{z + 2}\right) C(z)=z2+3z+21R(z)=z2+3z+21=z−1(z+1z−z+2z)
z z z 变换到差分方程:
c ( k ) + 3 c ( k − 1 ) + 2 c ( k − 2 ) = r ( k − 2 ) c(k)+3c(k - 1)+2c(k - 2)=r(k - 2) c(k)+3c(k−1)+2c(k−2)=r(k−2)
7.4.2 脉冲传递函数
-
脉冲传递函数的定义:

-
脉冲传递函数闭环方式,由采样开关隔开。
7.5 离散控制系统分析与设计
7.5.1 稳定性分析
-
用 1 + G ( z ) = 0 1 + G(z) = 0 1+G(z)=0 所有根都在以原点为中心的单位圆内,稳定;有单位圆外根,不稳定;在单位圆上,临界稳定。判断。
-
令:
z = w + 1 w − 1 \large z=\frac{w + 1}{w - 1} z=w−1w+1
使用劳斯判据判断。
7.6 离散控制系统的稳态误差
由终值定理:
e ( ∞ ) = l i m t → ∞ e ( t ) = l i m z → 1 ( z − 1 ) R ( z ) [ 1 + G ( z ) ] e(\infty)=lim _{t \to \infty}e(t)=lim _{z \to 1}\frac{(z - 1)R(z)}{[1 + G(z)]} e(∞)=limt→∞e(t)=limz→1[1+G(z)](z−1)R(z)
-
阶跃输入:
K p = l i m z → 1 [ 1 + G ( z ) ] K_{p}=lim _{z \to 1}[1 + G(z)] Kp=limz→1[1+G(z)]
e ( ∞ ) = l i m z → 1 1 1 + G ( z ) = 1 1 + G ( 1 ) = 1 K p e(\infty)=lim _{z \to 1}\frac{1}{1 + G(z)}=\frac{1}{1 + G(1)}=\frac{1}{K_{p}} e(∞)=limz→11+G(z)1=1+G(1)1=Kp1
-
斜坡输入:
K v = l i m z → 1 ( z − 1 ) G ( z ) K_{v}=lim _{z \to 1}(z - 1)G(z) Kv=limz→1(z−1)G(z)
e ( ∞ ) = l i m z → 1 T ( z − 1 ) [ 1 + G ( z ) ] = T l i m z → 1 ( z − 1 ) G ( z ) = T K v e(\infty)=lim _{z \to 1}\frac{T}{(z - 1)[1 + G(z)]}=\frac{T}{lim _{z \to 1}(z - 1)G(z)}=\frac{T}{K_{v}} e(∞)=limz→1(z−1)[1+G(z)]T=limz→1(z−1)G(z)T=KvT
-
抛物线输入:
K a = l i m z → 1 ( z − 1 ) 2 G ( z ) K_{a}=lim _{z \to 1}(z - 1)^{2}G(z) Ka=limz→1(z−1)2G(z)
e ( ∞ ) = l i m z → 1 T 2 ( z + 1 ) 2 ( z − 1 ) 2 [ 1 + G ( z ) ] = T 2 l i m z → 1 ( z − 1 ) 2 G ( z ) = T 2 K a e(\infty)=lim _{z \to 1}\frac{T^{2}(z + 1)}{2(z - 1)^{2}[1 + G(z)]}=\frac{T^{2}}{lim _{z \to 1}(z - 1)^{2}G(z)}=\frac{T^{2}}{K_{a}} e(∞)=limz→12(z−1)2[1+G(z)]T2(z+1)=limz→1(z−1)2G(z)T2=KaT2
7.7 离散系统的数字控制器的设计
无稳态误差最少拍设计:
最少拍系统的设计原则是:如果系统被控对象 G ( z ) G(z) G(z) 无延迟,且在 z z z 平面单位圆上及单位圆外无零极点,需选择闭环脉冲传递函数 W ( z ) W(z) W(z),使系统在典型输入作用下,经最少采样周期后,能使输出序列在各采样时刻的稳态误差为零,达到完全跟踪的目的,从而确定所需数字控制器的脉冲传递函数 D ( z ) D(z) D(z)。
系统的闭环脉冲传递函数为:
W ( z ) = C ( z ) R ( z ) = D ( z ) G ( z ) 1 + D ( z ) G ( z ) W(z)=\frac{C(z)}{R(z)}=\frac{D(z)G(z)}{1 + D(z)G(z)} W(z)=R(z)C(z)=1+D(z)G(z)D(z)G(z)
系统闭环误差脉冲传递函数为:
W e ( z ) = E ( z ) R ( z ) = 1 1 + D ( z ) G ( z ) W_{e}(z)=\frac{E(z)}{R(z)}=\frac{1}{1 + D(z)G(z)} We(z)=R(z)E(z)=1+D(z)G(z)1
当系统为单位反馈系统:
D ( z ) = W ( z ) G ( z ) [ 1 − W ( z ) ] D(z)=\frac{W(z)}{G(z)[1 - W(z)]} D(z)=G(z)[1−W(z)]W(z)
其中:
W ( z ) = 1 − W e ( z ) W(z)=1 - W_{e}(z) W(z)=1−We(z), W e ( z ) = 1 − W ( z ) W_{e}(z)=1 - W(z) We(z)=1−W(z)
得到:
D ( z ) = 1 − W e ( z ) G ( z ) W e ( z ) D(z)=\frac{1 - W_{e}(z)}{G(z)W_{e}(z)} D(z)=G(z)We(z)1−We(z)
当输入为:
R ( z ) = A ( z ) ( 1 − z − 1 ) v R(z)=\frac{A(z)}{\left(1 - z^{-1}\right)^{v}} R(z)=(1−z−1)vA(z)
要使得稳态误差为零:
W e ( z ) = ( 1 − z − 1 ) v F ( z ) W_{e}(z)=\left(1 - z^{-1}\right)^{v}F(z) We(z)=(1−z−1)vF(z)
F ( z ) F(z) F(z) 取 1。
得到了 D ( z ) D(z) D(z)。
第八章 非线性控制系统
8.1 非线性系统的特点
- 对于线性系统,叠加原理可以应用,对于非线性系统因为特性不是线性的,因此叠加原理不能应用。
- 一般来说,非线性不能求得完整的解,目前的数学工具还远远不够,因此一般只能对非线性系统的运动情况作一些估计,例如对系统的稳定性、动态品质等作一些估计。
常用的分析方法有:
- 描述函数法
- 相平面法
8.2 典型非线性环节的数学描述
8.2.1 典型非线性特性




8.2.2 非线性系统的运动特点
- 稳定性:非线性系统的稳定性不仅与系统的结构和参数有关,而且与系统的输入信号和初始条件有关。
- 系统的零输入响应形式:某些非线性系统的零输入响应形式与系统的初始状态有关。当初始状态不同时,同一个非线性系统可能有不同的响应形式,如单调发散、振荡收敛或振荡发散等。
- 极限环(自激振荡):有些非线性系统,在初始状态的激励下,可以产生固定振幅和固定频率的周期振荡,这种周期振荡称为非线性系统的自激振荡或极限环。
- 频率响应:在正弦输入信号作用下,非线性系统呈现出一些在线性系统中见不到的特殊现象,诸如跳跃谐振和多值响应、倍频振荡和分频振荡、频率捕捉(跟踪)现象等。
8.3 描述函数法
8.3.1 描述函数的基本概念
对非线性系统进行分析时,一、二阶系统采用相平面法,高阶时用描述函数法。描述函数是一种近似方法。
其基本原理是:当系统满足一定条件时,系统中非线性环节在正弦信号作用下的输出可用一次谐波分量来近似,由此导出非线性环节的近似等效频率特性,表达形式上类似于线性理论中的幅相频率特性。
1. 谐波线性化
y ( t ) ≈ A 1 cos ω t + B 1 sin ω t = Y 1 sin ( ω t + ϕ 1 ) y(t)\approx A_{1}\cos\omega t + B_{1}\sin\omega t=Y_{1}\sin(\omega t+\phi_{1}) y(t)≈A1cosωt+B1sinωt=Y1sin(ωt+ϕ1)
A 1 = 1 π ∫ 0 2 π y ( t ) cos ω t d ( ω t ) A_{1}=\frac{1}{\pi}\int_{0}^{2\pi}y(t)\cos\omega t\mathrm{d}(\omega t) A1=π1∫02πy(t)cosωtd(ωt)
B 1 = 1 π ∫ 0 2 π y ( t ) sin ω t d ( ω t ) B_{1}=\frac{1}{\pi}\int_{0}^{2\pi}y(t)\sin\omega t\mathrm{d}(\omega t) B1=π1∫02πy(t)sinωtd(ωt)
-
描述函数
非线性特性在进行谐波线性化后,参照幅相频率特性的定义,建立非线性特性的等效幅相特性,即描述函数。
N ( A ) = Y 1 sin ( ω t + ϕ 1 ) A sin ( ω t ) = Y 1 A ∠ ϕ 1 = B 1 + j A 1 A N(A)=\frac{Y_{1}\sin(\omega t+\phi_{1})}{A\sin(\omega t)}=\frac{Y_{1}}{A}\angle\phi_{1}=\frac{B_{1}+jA_{1}}{A} N(A)=Asin(ωt)Y1sin(ωt+ϕ1)=AY1∠ϕ1=AB1+jA1
8.3.3 用描述函数分析非线性系统
1. 系统稳定性分析
1 + N ( A ) G ( j ω ) = 0 或 N ( A ) G ( j ω ) = − 1 1 + N(A)G(j\omega)=0\quad 或 \quad N(A)G(j\omega)= - 1 1+N(A)G(jω)=0或N(A)G(jω)=−1
G ( j ω ) = − 1 N ( A ) G(j\omega)=-\frac{1}{N(A)} G(jω)=−N(A)1
若轨线 − 1 / N ( A ) -1/N(A) −1/N(A) 不被 G ( j ω ) G(j\omega) G(jω) 包围,则系统是稳定的;若轨线 − 1 / N ( A ) -1/N(A) −1/N(A) 被轨线 G ( j ω ) G(j\omega) G(jω) 包围,则系统是不稳定的;若 − 1 / N ( A ) -1/N(A) −1/N(A) 与 G ( j ω ) G(j\omega) G(jω) 相交,则意味着系统可能会产生自激振荡,若从内到外则稳定,反之不稳定。
2. 描述函数分析
求出系统的描述函数,用稳定性分析。
3. 非线性系统的简化
并联串联。
8.4 相平面法
8.4.1 相平面图及绘制方法
该方法用图解法来求一阶、二阶微分方程的解。
以相变量 x 1 x_1 x1 和 x 2 x_2 x2 为坐标构成平面,称为相平面。
在相平面上,由 ( x 1 , x 2 ) (x_1, x_2) (x1,x2) 以时间为参变量构成的曲线,称为相轨迹。
若以一些初始状态作为起始点,在相平面上做出一簇相轨迹,称为系统的相平面图。
相平面图的绘制:
-
解析法绘制
对:
d x ˙ d x = − f ( x , x ˙ ) x ˙ \large \frac{\text{d}\dot{x}}{\text{d}x}=\frac{-f\left( x,\dot{x} \right)}{{\dot{x}}} dxdx˙=x˙−f(x,x˙)
直接积分,得到 x x x 和 x ′ x' x′ 的解析关系式,其中 x ′ x' x′ 和 x 0 x_0 x0 为初始条件。
-
等倾线法
d x ˙ d x = − f ( x , x ˙ ) x ˙ \large \frac{\text{d}\dot{x}}{\text{d}x}=\frac{-f\left( x,\dot{x} \right)}{{\dot{x}}} dxdx˙=x˙−f(x,x˙)
令:
d x ˙ / d x = a , \text{d}\dot{x}/\text{d}x=a, dx˙/dx=a,
给定一组 a a a 值,可求得一组等倾线簇。利用等倾线簇,可以确定相平面中任意一点相轨迹的斜率。
8.4.2 奇点与极限环
-
奇点:
由:
d x ˙ d x = − f ( x , x ˙ ) x ˙ \large \frac{\text{d}\dot{x}}{\text{d}x}=\frac{-f\left( x,\dot{x} \right)}{{\dot{x}}} dxdx˙=x˙−f(x,x˙)
分子分母同时为零,在奇点处,相轨迹的斜率不确定:
{ x ˙ = 0 f ( x , x ˙ ) = 0 \left\{ \begin{align*} & \dot{x}=0 \\ & f\left( x,\dot{x} \right)=0 \\ \end{align*} \right. {x˙=0f(x,x˙)=0求解奇点类型:进行线性化:







-
极限环
相平面分析
试绘制系统的:
e − e ˙ \large e-\dot{e} e−e˙
相平面图。

建立方程式:

由非线性环节分区:

画出此种类型相平面图:

Ref 2、Ref3、Ref 4
-
自动控制原理知识点精要梳理 | Ref 2-优快云 博客
https://blog.youkuaiyun.com/u013669912/article/details/146958402 -
自动控制原理知识点精要梳理 | Ref 3-优快云 博客
https://blog.youkuaiyun.com/u013669912/article/details/146959192 -
自动控制原理知识点精要梳理 | Ref 4-优快云 博客
https://blog.youkuaiyun.com/u013669912/article/details/146959205
via:
- 自动控制原理知识点整合归纳(韩敏版)_自动控制原理知识点总结-优快云博客
https://blog.youkuaiyun.com/ssslevel/article/details/109085271

















 4044
4044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}
{kind=link}
{kind=link}