







 超级会员免费看
超级会员免费看
 本文介绍了红外避障模块的工作原理、参数、接口说明,并提供了使用NodeMCU与Arduino IDE的实例,展示如何在寻迹小车上实现避障功能。通过调整电位器可调节检测距离,适用于机器人避障、小车避障等多种场景。
本文介绍了红外避障模块的工作原理、参数、接口说明,并提供了使用NodeMCU与Arduino IDE的实例,展示如何在寻迹小车上实现避障功能。通过调整电位器可调节检测距离,适用于机器人避障、小车避障等多种场景。
目录
1、简介
2、使用例子
3、资源下载
正文
今天我们来使用红外避障模块实现一个寻迹小车。后面的文章计划会继续使用到这个模块实现更复杂的功能,这篇文章先从简单的单功能实现开始。请跟我一起来学习吧。
1、简介
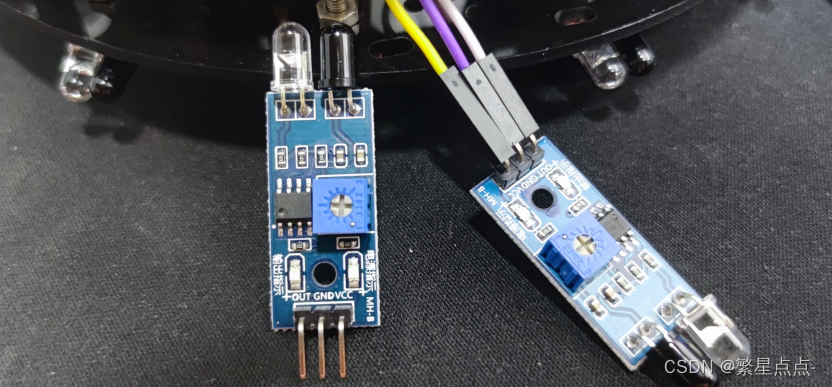
红外避障模块具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围 2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
模块参数说明
- 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cmÿ

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2671
2671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











