






整个项目在这里https://github.com/li01233/mul_modal_ROS
一 GPS
我又来了,这次需要在采集数据的系统中加入GPS和IMU,我们这两个东西都是依靠网口传输的,所以一些通用的串口方法不适用。因此这里我使用了ros_nmea_driver包
编写网口传输的launch文件,这个包会将网口中的NMEA语句转为ROS格式。这里我的网口设置为127.0.0.1是因为我开了opencpn转接数据,正常来说直接填你的IP即可
<launch>
<!-- A simple launch file for the nmea_serial_driver node. -->
<arg name="ip" default="127.0.0.1" />
<arg name="port_gps" default="20003" />
<arg name="port_compass" default="20001" />
<arg name="frame_id_1" default="gps" />
<arg name="frame_id_3" default="compass" />
<arg name="use_GNSS_time" default="False" />
<arg name="time_ref_source" default="gps" />
<arg name="useRMC" default="False" />
<node name="nmea_socket_driver_node_gps" pkg="nmea_navsat_driver" type="nmea_socket_driver" output="screen">
<param name="ip" value="$(arg ip)"/>
<param name="port" value="$(arg port_gps)" />
<param name="frame_id" value="$(arg frame_id_1)" />
<param name="use_GNSS_time" value="$(arg use_GNSS_time)" />
<param name="time_ref_source" value="$(arg time_ref_source)" />
<param name="useRMC" value="$(arg useRMC)" />
</node>
<node name="nmea_socket_driver_node_compass" pkg="nmea_navsat_driver" type="nmea_socket_driver" output="screen">
<param name="ip" value="$(arg ip)"/>
<param name="port" value="$(arg port_compass)" />
<param name="frame_id" value="$(arg frame_id_3)" />
<param name="use_GNSS_time" value="$(arg use_GNSS_time)" />
<param name="time_ref_source" value="$(arg time_ref_source)" />
<param name="useRMC" value="$(arg useRMC)" />
</node>
</launch>二 IMU
IMU信息是特殊的格式,用网口传输,其定义如下
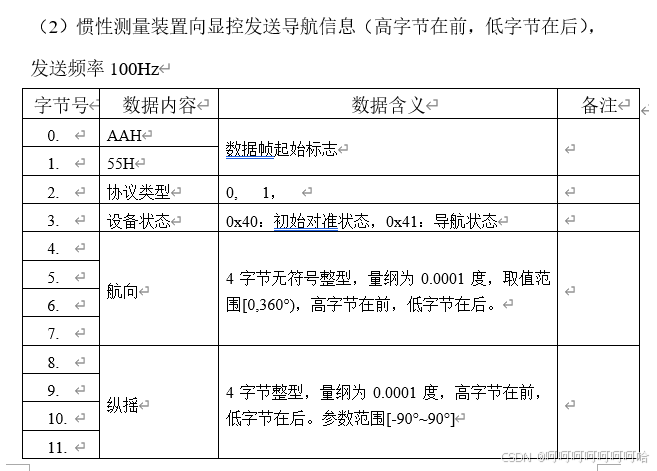

因此我新写了一个包将IMU的信息从网口直接读取为uint8[]数组(留待后续解析)
#! /usr/bin/env python3
import rospy
import socket
import struct
from pyais import decode
from message_interface.msg import Imu
class IMUParser:
def __init__(self):
# 创建UDP套接字
self.sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# 读取param
self.ip = rospy.get_param('~ip', '0.0.0.1')
self.port = rospy.get_param('~port', 30002)
# 绑定本地地址和端口
local_address = (self.ip, self.port)
self.sock.bind(local_address)
self.pub = rospy.Publisher("/imu", Imu, queue_size=10)
self.timer = rospy.Timer(rospy.Duration(0.1), self.run)
def run(self, event):
data, _ = self.sock.recvfrom(1024)
msg = Imu()
msg.header.stamp = rospy.Time.now()
msg.header.frame_id = "imu"
msg.data = data
self.pub.publish(msg)
if __name__ == "__main__":
rospy.init_node("imu_parser")
parser = IMUParser()
rospy.spin()launch文件为,其中imu的ip是192.168.2.111
<launch>
<arg name="ip" default="127.0.0.1" />
<arg name="arpa_port" default="20004" />
<arg name="ais_port" default="20002" />
<arg name="imu_port" default="30013" />
<arg name="imu_ip" default="192.168.2.111" />
<node name="arpa_parser" pkg = "opencpn2ros" output="screen" type = "arpa_parser.py">
<param name="port" value="$(arg arpa_port)" />
<param name="ip" value="$(arg ip)" />
</node>
<node name="ais_parser" pkg = "opencpn2ros" output="screen" type = "ais_parser.py">
<param name="port" value="$(arg ais_port)" />
<param name="ip" value="$(arg ip)" />
</node>
<node name="imu_parser" pkg = "opencpn2ros" output="screen" type = "imu_parser.py">
<param name="port" value="$(arg imu_port)" />
<param name="ip" value="$(arg imu_ip)" />
</node>
</launch>后续解析报文程序如下,解析后的数据以/imu/data话题发送,类型为sensor_msgs的IMU格式
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Imu
from message_interface.msg import Imu as CustomImu # 替换为实际的自定义 Imu 消息包名
from tf.transformations import quaternion_from_euler
import math
import struct
def parse_hex_data(hex_str):
data = bytes.fromhex(hex_str)
if len(data) < 107:
raise ValueError("数据长度不足")
# 校验起始标志
if data[0] != 0xAA or data[1] != 0x55:
raise ValueError("无效的起始标志")
result = {}
# 协议解析
result["协议类型"] = data[2]
result["设备状态"] = "初始对准状态" if data[3] == 0x40 else "导航状态"
# 航向(4字节无符号)
heading = struct.unpack('>I', data[4:8])[0]
result["航向"] = heading * 0.0001
# 纵摇(4字节有符号)
pitch = struct.unpack('>i', data[8:12])[0]
result["纵摇"] = pitch * 0.0001
# 横摇(4字节有符号)
roll = struct.unpack('>i', data[12:16])[0]
result["横摇"] = roll * 0.0001
# 角速度(2字节有符号)
result["WH"] = struct.unpack('>h', data[16:18])[0] * 0.0001
result["WP"] = struct.unpack('>h', data[18:20])[0] * 0.0001
result["WR"] = struct.unpack('>h', data[20:22])[0] * 0.0001
# DZTime处理
dztime_bytes = data[22:26]
if data[3] == 0x40:
result["对准剩余时间"] = struct.unpack('>I', dztime_bytes)[0]
else:
result["DZTime"] = struct.unpack('>i', dztime_bytes)[0]
# 标志位处理
result["多普勒标志位"] = data[26]
result["GPS标志位"] = data[27]
result["算法选择标志位"] = data[28]
# 故障标志解析
gyro_acc_flag = data[29]
faults = []
if gyro_acc_flag & 0x01: faults.append("加速度计X故障")
if gyro_acc_flag & 0x02: faults.append("加速度计Y故障")
if gyro_acc_flag & 0x04: faults.append("加速度计Z故障")
if gyro_acc_flag & 0x10: faults.append("陀螺X故障")
if gyro_acc_flag & 0x20: faults.append("陀螺Y故障")
if gyro_acc_flag & 0x40: faults.append("陀螺Z故障")
if gyro_acc_flag & 0x80: faults.append("温度传感器故障")
result["元件故障标志位"] = faults
# 其他标志位...
# 校验计算
checksum1 = sum(data[2:35]) & 0xFF
result["校验1"] = "通过" if checksum1 == data[35] else "失败"
checksum2 = sum(data[2:107]) & 0xFF
result["校验2"] = "通过" if checksum2 == data[106] else "失败"
return result
class ImuParser:
def __init__(self):
# 初始化ROS节点
rospy.init_node('imu_parser_node', anonymous=True)
# 创建发布者
self.pub = rospy.Publisher('/imu/data', Imu, queue_size=10)
# 订阅自定义 Imu 话题
rospy.Subscriber('/imu', CustomImu, self.callback)
def callback(self, msg):
# 将 uint8[] 转换为十六进制字符串
hex_str = ''.join('{:02x}'.format(byte) for byte in msg.data)
try:
# 解析十六进制数据
parsed_data = parse_hex_data(hex_str)
# 创建标准 Imu 消息对象
imu_msg = Imu()
# 设置消息头
imu_msg.header.stamp = msg.header.stamp
imu_msg.header.frame_id = msg.header.frame_id # 坐标系名称
# 填充角速度(ROS坐标系:x-forward, y-left, z-up)
imu_msg.angular_velocity.x = parsed_data["WH"]
imu_msg.angular_velocity.y = parsed_data["WP"]
imu_msg.angular_velocity.z = parsed_data["WR"]
# 将欧拉角转换为四元数(注意旋转顺序)
yaw = math.radians(parsed_data["航向"]) # 航向角(绕Z轴)
pitch = math.radians(parsed_data["纵摇"]) # 俯仰角(绕Y轴)
roll = math.radians(parsed_data["横摇"]) # 横滚角(绕X轴)
# 注意:quaternion_from_euler使用RPY顺序(roll, pitch, yaw)
q = quaternion_from_euler(roll, pitch, yaw)
imu_msg.orientation.x = q[0]
imu_msg.orientation.y = q[1]
imu_msg.orientation.z = q[2]
imu_msg.orientation.w = q[3]
# 设置协方差(如果未知则填-1)
imu_msg.orientation_covariance = [-1.0]*9
imu_msg.angular_velocity_covariance = [-1.0]*9
imu_msg.linear_acceleration_covariance = [-1.0]*9
# 发布消息
self.pub.publish(imu_msg)
rospy.loginfo("IMU数据已发布")
except ValueError as e:
rospy.logerr("数据解析错误: %s", str(e))
if __name__ == '__main__':
try:
parser = ImuParser()
rospy.spin()
except rospy.ROSInterruptException:
pass三 云台相机的云台控制
云台相机的控制程序我写进了hik_tem包中,hik_tem包使用了海康的sdk,除了云台控制同时还有获取双光谱相机的温度原始矩阵的程序
云台的核心控制逻辑是订阅一个/ptz_ctrl话题,一旦返回消息则进入回调函数发送指令给相机
void HikCamera::PtzCtrlCallback(const message_interface::PtzCtrl::ConstPtr& msg)
{
NET_DVR_PTZPOS ptz_pos;
unsigned int errCode;
ptz_pos.wAction = 1;
ptz_pos.wPanPos = dec_to_hex((*msg).Pan * 10);
ptz_pos.wTiltPos = dec_to_hex((*msg).Tilt * 10);
// 不变焦
NET_DVR_PTZPOS Pos_judge;
DWORD tmp = 0;
NET_DVR_GetDVRConfig(0, NET_DVR_GET_PTZPOS, 0, &Pos_judge, sizeof(NET_DVR_PTZPOS), &tmp);
ptz_pos.wZoomPos = Pos_judge.wZoomPos;
if(!NET_DVR_SetDVRConfig(user_id,NET_DVR_SET_PTZPOS,channel,(void*)&ptz_pos,sizeof(NET_DVR_PTZPOS))){
errCode = NET_DVR_GetLastError();
ROS_ERROR("******************************************\n");
ROS_ERROR("errCode: %d\n",errCode);
ROS_ERROR("******************************************\n");
}
}同时写了一个用键盘发送/ptz_ctrl命令的程序,也在hik_tem中。这部分写的比较粗糙,也没考虑逻辑,将就用吧
import rospy
from message_interface.msg import RadarTarget,PtzCtrl
from pynput import keyboard
import time
class PTZController:
def __init__(self, mode= "Manual"):
self.p = PtzCtrl()
self.p.Pan = 150
self.p.Tilt = 0
self.p.Zoom = 0
self.mode = mode
self.pub = rospy.Publisher("/ptz_ctrl", PtzCtrl, queue_size=10)
self.listener = keyboard.Listener(on_press=self.on_press,on_release=self.on_release)
self.sub = rospy.Subscriber("/radar_target", RadarTarget, self.target_pub)
self.init_ptz() # 2s初始化云台
self.listener.start()
self.cruise_flag = False
if self.mode == "Fix":
self.cruise_flag = True
self.timer = rospy.Timer(rospy.Duration(2), self.cruise)
self.key_pressed_time = 0
def init_ptz(self):
start_time = time.time()
while time.time() - start_time < 2:
self.pub.publish(self.p)
rospy.loginfo(f"PTZ Initialized")
def target_pub(self, msg):
if self.mode == "Auto":
# 在这里写处理导航目标检测数据的逻辑
self.p.Pan = int(msg.pitch) + 110
self.p.Pan %= 360
rospy.loginfo("Pan:%s, Tilt:%d, Zoom:%d",self.p.Pan, self.p.Tilt, self.p.Zoom)
self.pub.publish(self.p)
def on_press(self, key):
try:
# 若是巡航模式或自动,则不响应按键
if self.mode == "Fix" or self.mode == "Auto":
return
# 手动模式下,响应按键
if key.char == 'a':
self.p.Pan -= 10
self.p.Pan %= 360
rospy.loginfo("Turn Left, Pan: %d", self.p.Pan)
elif key.char == 'd':
self.p.Pan += 10
self.p.Pan %= 360
rospy.loginfo("Turn Right, Pan: %d", self.p.Pan)
elif key.char == 'w':
self.p.Tilt += 5
self.p.Tilt = 90 if self.p.Tilt > 90 else self.p.Tilt
rospy.loginfo("Turn Up, Tilt: %d", self.p.Tilt)
elif key.char == 's':
self.p.Tilt -= 5
self.p.Tilt = 0 if self.p.Tilt < -0 else self.p.Tilt
rospy.loginfo("Turn Down, Tilt: %d", self.p.Tilt)
self.pub.publish(self.p)
if key.char == 'f':
self.key_pressed_time = time.time()
except AttributeError:
pass
def on_release(self, key):
press_duration = time.time() - self.key_pressed_time
if key.char == 'f' and press_duration > 1: # 如果是c键,且按下时间超过2秒,则切换模式
if self.mode == "Manual" or self.mode == "Fix":
self.mode = "Auto"
self.cruise_flag = False
else:
self.mode = "Manual" # 自动模型会切换为手动模式,需要再短按进入巡航模式
self.close_subscriber() # 关闭订阅者
self.cruise_flag = False
elif key.char == 'f' and press_duration < 2: # 如果是c键,且按下时间小于2秒,则切换手动或巡航模式
if self.mode == "Manual":
self.mode = "Fix"
self.cruise_flag = True
elif self.mode == "Fix":
self.mode = "Manual"
self.cruise_flag = False
def cruise(self, event):
while self.cruise_flag:
self.p.Pan += 10
self.p.Pan %= 360
self.pub.publish(self.p)
rospy.sleep(2)
rospy.loginfo("Pan:%s, Tilt:%d, Zoom:%d",self.p.Pan, self.p.Tilt, self.p.Zoom)
if __name__ == "__main__":
rospy.init_node("ptz_ctrl")
controller = PTZController()
rospy.spin()
最后大致就这样,三大部分全部做完,如果有什么没提到的细节可以参考我的github文档
总结一下功能:完成激光雷达,全景相机,双光谱相机,GPS,IMU,AIS,导航雷达的数据解析与采集,完成激光雷达和全景相机的时间同步和激光雷达的去Nan值,能对这几种数据进行重播,能将录制的bag进行按每个bag进行解包

















 1785
1785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









