




 本文介绍了如何将激光雷达的卡尔曼滤波(KF)和毫米波雷达的扩展卡尔曼滤波(EKF)封装在同一类中,以实现多传感器融合定位。通过对激光雷达和毫米波雷达数据的分析,展示了如何处理和融合这两种传感器的输入数据,以提高定位精度。在实际应用中,每帧数据会依次通过KF和EKF进行处理,从而结合各自优势。
本文介绍了如何将激光雷达的卡尔曼滤波(KF)和毫米波雷达的扩展卡尔曼滤波(EKF)封装在同一类中,以实现多传感器融合定位。通过对激光雷达和毫米波雷达数据的分析,展示了如何处理和融合这两种传感器的输入数据,以提高定位精度。在实际应用中,每帧数据会依次通过KF和EKF进行处理,从而结合各自优势。
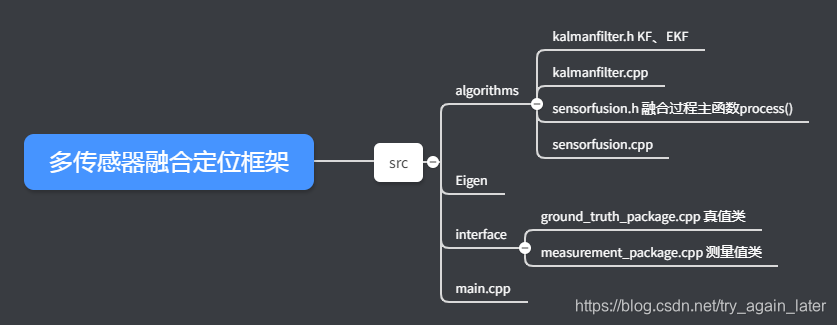
有了上一节分别对激光雷达做KF、对毫米波雷达做EKF两种流程之后,我们合并KF和EKF的跟踪算法的代码,将他们封装在一个名为KalmanFilter的类中,方便后续调用。下面做一个多传感器融合定位实验,采集到的数据为两种交替出现的数据。
代码整体框架如图所示:
前言
无论是KF处理线性问题还是EKF处理非线性问题,它都只涉及单一传感器的障碍物跟踪。激光雷达测量位置精度更高但是无法测量速度,毫米波雷达测量速度准确,但是在位置测量精度上低。为了充分利用各个传感器的优势,需要做多传感器融合定位。
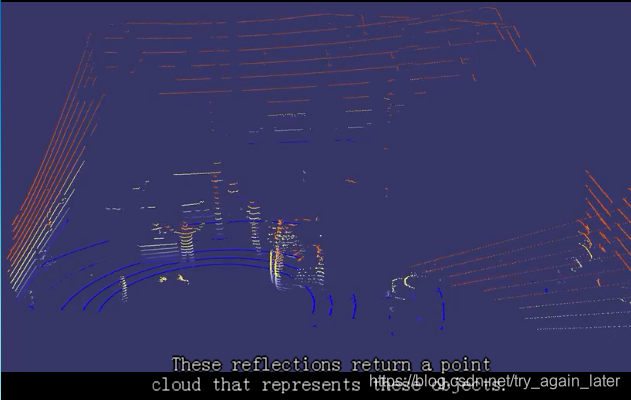
激光雷达Lidar:发射激光束,利用光的直线传播能够直接获得障碍物在笛卡尔坐标系下x、y、z方向上距离。建立三维点云图,探测目标的位置、速度等特征量。
状态向量分别是位置和速度的x、y方向(x,y,vx,vy)
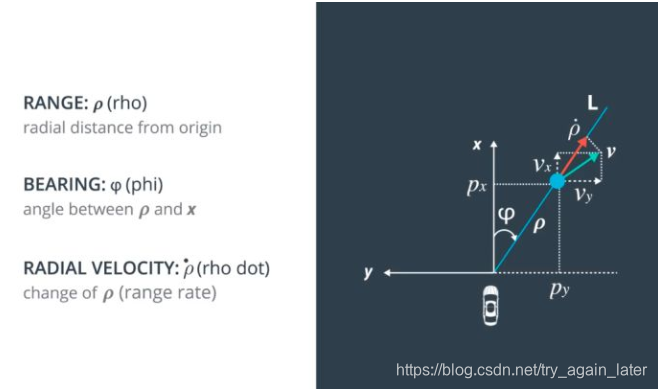
毫米波雷达Radar:发射毫米波(电磁波),利用多普勒效应,所测数据都是在极坐标系下。毫米波导引头穿透雾、烟、灰尘的能力强,成本低,但是探测距离受到频段损耗的直接制约。
状态向量为极坐标系下雷达的距离ρ,方向角ϕ和距离的变化率(径向速度)ρ’。

对比:
Lidar探测精度高、探测范围广,稳定性强,成本高。但是在雨雪雾等极端天气下、光束受遮挡后性能较差,采集的数据量过大。64线70万元人民币。
Radar穿透雾、烟、灰尘的能力强,探测距离受到频段损耗的直接制约(想要探测的远,就必须使用高频段雷达),也无法感知行人,并且对周边所有障碍物无法进行精准的建模。100美元左右。
一、输入数据分析
在data目录下名为sample-laser-radar-measurement-data-2.txt的文件,这就是传感器融合的输入数据。
假设:Lidar和Radar都固定在原点(0,0)处,且检测障碍物频率相同,两种雷达交替触发检测。

每行第一个字母L是Lidar,R是Radar。
第1、2行表示原点位置所以都只有时间戳。
Lidar:X方向测量值、Y方向测量值、时间戳、X方向位置真值、Y方向位置真值、X方向速度真值、Y方向速度真值。
Radar:障碍物在极坐标系下的距离ρ、角度ϕ、径向速度ρ’、时间戳、X方向位置真值、Y方向位置真值、X方向速度真值、Y方向速度真值。
主函数main()
框架为:
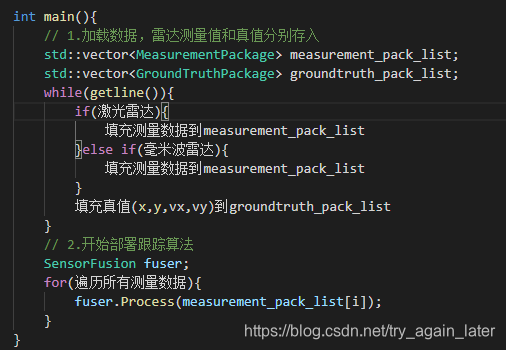
这部分我们重点考虑填充测量数据和真值数据,把传感器输入数据sample-laser-radar-measurement-data-2.txt填充进来。
1、导入txt文件
这部分可以说是从txt文件中导入数据的标配了。
// 设置毫米波雷达/激光雷达输入数据的路径
// Set radar & lidar data file path
std::string input_file_name = "../data/sample-laser-radar-measurement-data-2.txt";
// 打开数据,若失败则输出失败信息,返回-1,并终止程序
// Open file. if failed return -1 & end program
std::ifstream input_file(input_file_name.c_str(), std::ifstream::in);
if (!input_file.is_open()) {
std::cout << "Failed to open file named : " << input_file_name << std::endl;
return -1;
}
2、测量值类和真值类
测量值MeasurementPackage类:时间戳、传感器类型、位置(xy)
class MeasurementPackage {
public:
long long timestamp_;
enum SensorType{
LASER,
RADAR
} sensor_type_;
Eigen::VectorXd raw_measurements_;
};
真值GroundTruthPackage类:时间戳、传感器类型、数据(距离、角度、镜像速度)
class GroundTruthPackage {
public:
long timestamp_;
enum SensorType{
LASER,
RADAR
} sensor_type_;
Eigen::VectorXd gt_values_;
};
3、txt数据导入测量值类和真值类
值得注意的是,未来主要用的数据是测量数据,真值是为了做对比才出现的,作用仅限于最后用于画图。我们使用测量数据进行process()函数,如果是Lidar数据就用KF更新,如果是Radar数据就用EKF更新。
std::vector<MeasurementPackage> measurement_pack_list;
std::vector<GroundTruthPackage> groundtruth_pack_list;
std::string line;
while (getline(input_file, line)) {
// getline后是string类型
std::string sensor_type;
MeasurementPackage meas_package;
GroundTruthPackage gt_package;
std::istringstream iss(line);// 从string转为数据流格式
long long timestamp;
// 读取当前行的第一个元素,L代表Lidar数据,R代表Radar数据
// Reads first element from the curr 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1500
1500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









