




报告导读
当下,激光雷达作为精确的环境感知传感器,在众多领域扮演着愈发关键的角色。从智能工厂的高效生产与精准管理,到消费电子产品的智能化交互与功能升级,激光雷达技术的应用不断拓展与深化。二维激光雷达、三维机械式激光雷达以及Flash纯固态激光雷达等不同类型,凭借各自独特的技术优势和性能特点,在智能工厂的建设与发展中,发挥着重要作用。
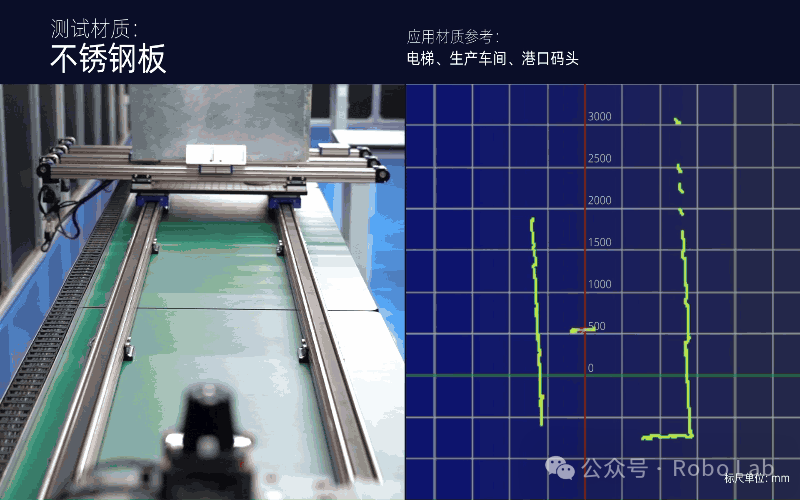
二维单线激光雷达二维激光雷达通常采用单线激光发射与接收装置,通过水平或垂直方向的机械扫描来获取二维平面内的距离信息,以点云数据或距离图像的形式呈现环境轮廓。
核心优势:成本相对较低,技术成熟,数据处理难度小。能够快速提供二维平面内的精确距离信息。在对高度信息要求不高的二维平面场景中具有较高的性价比。
局限性:只能获取单一平面内的信息,无法感知物体的高度和三维形状。在面对复杂立体场景时存在较大的局限性,难以满足一些对高度感知有要求的应用需求。
典型应用场景:工业自动化生产:在汽车零部件生产线上,二维激光雷达可安装在固定位置,对传送带上的零部件进行实时检测,确定零部件的位置和姿态,引导机械臂进行精确抓取和装配,提高生产效率和准确性。
锐驰智光 LakiBeam1 工业级单线二维激光雷达:基于脉冲飞行时间(pToF)原理设计,兼具性能、成本和可靠性,点云抖动小,质量高,能够捕捉到更多环境细节。适用于室内机器人主激光以及室外机器人斜激光、AGV 避障、工业自动化、港口自动化等自动化领域,可安装在工业自动化生产线上的机械臂上,实时检测周围环境,避免与其他设备或人员发生碰撞。
物料输送与存储:在大型物流仓库中,用于监测物料在输送带上的运行状态,检测物料是否偏离轨道或出现堆积堵塞等情况,并及时反馈给控制系统进行调整,保障物料输送的顺畅高效。同时,还能对货架上的货物进行二维轮廓扫描,实现库存量的快速统计和管理。
西克 SICK TiM 系列 2D 激光雷达:具有出色的测量性能和高稳定性,测量范围为 0.5-80m,可满足不同距离的测量需求。防护等级达到 IP6
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1059
1059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









