



评估使用触觉传感器测量纸盒顺应性
摘要
本文报道了一种触觉传感器在测量折叠纸盒顺应性方面的潜力评估。使用触觉传感器可实现对接触点局部区域的力学行为进行测量,而现有方法仅能测量纸盒的整体力学行为。关于触觉的研究表明,人类在评估物体顺应性时,局部力学行为比整体行为更为重要。研究表明,该触觉传感器的响应与纸板的弯曲刚度密切相关,同时也受几何特征的影响。本文提出并测试了一种利用线性判别分析将传感器22维输出降为单一有意义特征的方法。结果表明,该传感器是构建一种融合皮肤的和动觉信息的纸盒顺应性测量方法的良好候选。
关键词 : 弯曲刚度;折叠纸盒;纸板;触觉传感器。
引言
包装的关键时刻是潜在顾客在零售店拿起它的那一刻(勒夫格伦 2005)。此时,顾客做出决定——是否购买此产品?先前的研究表明,仅仅触摸产品的行为就会影响对此产品的判断(皮克和蔡尔德斯 2006, 2003)。对于品牌所有者而言,利用这种体验中的力量可能是一种重要的营销工具。大量研究表明,这种效应在实践中已有诸多实例。
相同的水用玻璃杯盛装时可能比用塑料杯盛装时味道更好(涂等人 2015),或者用坚固的杯子盛装时味道更好,而用轻薄的杯子则较差(克里希纳和莫林 2008)。当食品包装表面更粗糙时,食品可能被认为更酥脆(皮凯拉斯‐菲兹曼和斯宾斯 2012)。汤是否被认为是天然的,可能部分取决于其包装形式(Labbe et al. 2013)。
所有这些结果表明,触觉特性在决定是否购买产品时可能起到重要作用。其中一个可能很重要的属性是包装的刚度。尽管公开文献中的数据很少,但已有行业兴趣的证据。有两项专利提到了“握持刚度”(Ljungstroem和Stacy‐Ryan 2000,村田2013)。此外,还有一项关于威士忌纸盒的案例研究,其中握持刚度被列为关键属性(Rundh 2013)。
触觉与其他许多感觉不同,因为其感觉需要主动探索。为感知触觉特性而采取的动作被称为探索性程序(EP)。EP的例子包括包裹或抚摸物体。
在判断顺应性时,人类可以同时利用动觉线索和皮肤线索。动觉线索主要涉及在施加一定力时手指的运动方式。而皮肤线索则与指尖周围发生的情况相关,并由皮肤中的感受器接收。Srinivasan和LaMotte(1995)表明,仅凭皮肤线索就足以进行顺应性辨别,而只有当物体是非均质的情况下才需要动觉线索。Bergmann Tiest和Kappers(2008)在此基础上研究,制作了具有顺应性表面和刚性核心的刺激物。当要求受试者比较两种类型的刺激时,发现皮肤信息对判断的贡献占75%,其余部分来自动觉信息。
以类似于人类收集动觉信息的方式测试包装可以通过刚性物体之间的压缩来实现,即在刚性物体之间进行压缩(Eriksson 和 Korin 2017)。如上所述,这些信息并不是人类判断顺应性时主要使用的。为了提供更接近人类感知的测试结果,使用包含触觉传感器的测试仪器将非常有用。理想情况下,此类传感器应模拟人手指与包装之间相关的感觉模式以及接触力学。人工指尖已被用于测试包装材料(Shao 等人 2010, 2009),但这些人工指尖并未包含进行顺应性测量所必需的感觉能力。
在本研究中,我们评估了一种试图模拟人类手指接触力学及其感知能力的触觉传感器。目的是改进对能够更全面反映人类感知的重要参数的测量可能性。我们实施了EP(探索模式),并测试基于传感器读数区分包装的能力。我们仅关注皮肤线索,因为它们在判断柔顺性时最为重要。
材料与方法
纸板包装
本研究中使用的包装均在平压模切机(Esko‐Graphics,根特,比利时)上制造。所有包装均由涂布原生纸板制成,克重范围为239–486克/平方米²。材料由工业规模的纸板机生产。总共测试了8种不同的材料和3种不同的包装设计。标记为I–III的包装汇总于表1。材料的材料数据如下:
表1: 被测包装的尺寸和材料
| 包装 type | 高度 h (mm) | 宽度 w (mm) | 深度 d (mm) | 材料 A–H |
|---|---|---|---|---|
| I | 228 | 54 | 185 | X X X X |
| II | 280 | 82 | 82 | X X X X |
| III | 280 | 98 | 98 | X X X X |
材料A–H的总结见表2。使用抗弯强度几何平均值(表2中的BR GM)来区分包装材料(在图4–5的X轴上绘制)。
表2: 所用材料的特性。抗弯强度 = 几何平均弯曲阻力
| 属性 | 方法 | Unit | A | B | C | D | E | F | G | H |
|---|---|---|---|---|---|---|---|---|---|---|
| 克重 | ISO 536 | g/m² | 239 | 264 | 292 | 351 | 305 | 352 | 403 | 486 |
| BR MD | ISO 2493 | mN | 199 | 288 | 419 | 689 | 489 | 841 | 1207 | 1775 |
| BR CD | ISO 2493 | mN | 110 | 152 | 222 | 397 | 271 | 352 | 573 | 868 |
| BR GM | — | mN | 148 | 209 | 305 | 523 | 364 | 544 | 832 | 1241 |
| SCT MD | ISO 9895 | kN/m | 5.8 | 6.9 | 6.7 | 8.4 | 7.7 | 8.4 | 10.2 | 9.9 |
| SCT CD | ISO 9895 | kN/m | 4.4 | 5.2 | 5.0 | 6.5 | 5.9 | 6.6 | 7.8 | 8.0 |
| SCT GM | — | kN/m | 5.1 | 6.0 | 5.8 | 7.4 | 6.7 | 7.4 | 8.9 | 8.9 |
探索性程序
本实验的EP(探索模式)设计基于一项预研究。受试者被展示一组包装I和II类型的包装,并被要求填写一份关于该包装的简单问卷。所使用的包装为纯白色,且未向受试者提供有关产品或目标市场细分的其他信息。包装I装有两层巧克力(重量530克),产品为阿拉丁(亿滋瑞典公司,乌普兰韦斯比,瑞典)。包装II装有一瓶博萨格吕特酒(750毫升,1260克)(阿尔蒂亚瑞典公司,昆根,瑞典)。
在瑞典的一家超市招募了受试者(n= 44)。首先询问他们的性别、年龄和惯用手。共有28名女性和16名男性参与者,中位年龄为59岁。其中3人惯用左手,其余41人惯用右手。随后要求他们从四个描述每个包装的词语中选择一个。这四个词语是稳定、不稳定、耐用和脆弱。选择这些词语是为了使受试者能够运用相关的EP(探索模式)。此外,受试者还可以提供开放式文本回答。
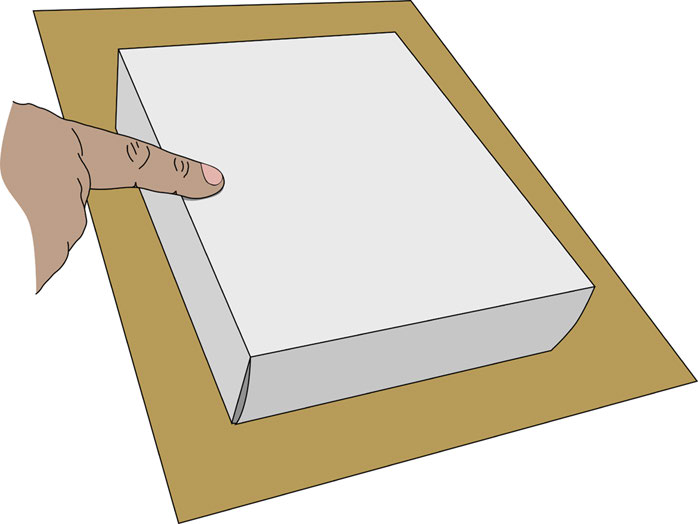
通过研究受试者在本次实验中探索包装的方式,可以确定对消费者感知包装重要的加载方向。根据识别出的载荷情况,我们定义了一个简化的EP(探索模式)。我们选择通过排除切向力来简化EP(探索模式),这是合理的,因为纸板包装是一种壳体结构,能够很好地承受薄膜应力。所实施的EP(探索模式)旨在模拟当包装放置在平坦刚性表面时用一个手指对其进行压缩的情况,见图1。
BioTac传感器
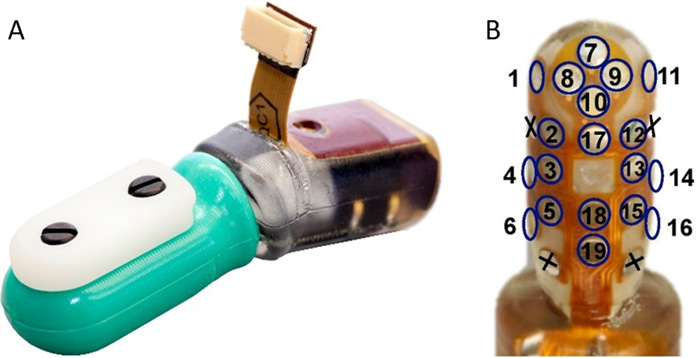
第二阶段使用的触觉传感器是BioTac 2P(SynTouch公司,美国加利福尼亚州洛杉矶)(Wettels等,2008)。BioTac的设计旨在模拟人手指的感知能力。它由一个刚性环氧树脂核心组成,外部包裹弹性体皮肤,内部充满导电液体。核心中嵌入了共19个电极,用于测量液体位移引起的阻抗变化。电极信号以100赫兹的频率进行数字化。图2显示了BioTac上电极的分布和编号。
此外,BioTac具有一个压力传感器和一个热敏电阻。压力传感器测量液体内部的压力。该信号通过低通滤波器滤波,并在P DC通道上以100赫兹进行数字化。压力传感器还经过高通滤波、放大,并在P AC 通道上以2200赫兹进行数字化。热敏电阻也被数字化,并提供低通滤波版本和微分版本。
BioTac已成功用于先前实验中的力和顺应性测定(Ciobanu 等人 2014年,Wettels 和 Loeb 2011年),这使其成为本实验的一个良好候选方案。
实验设置
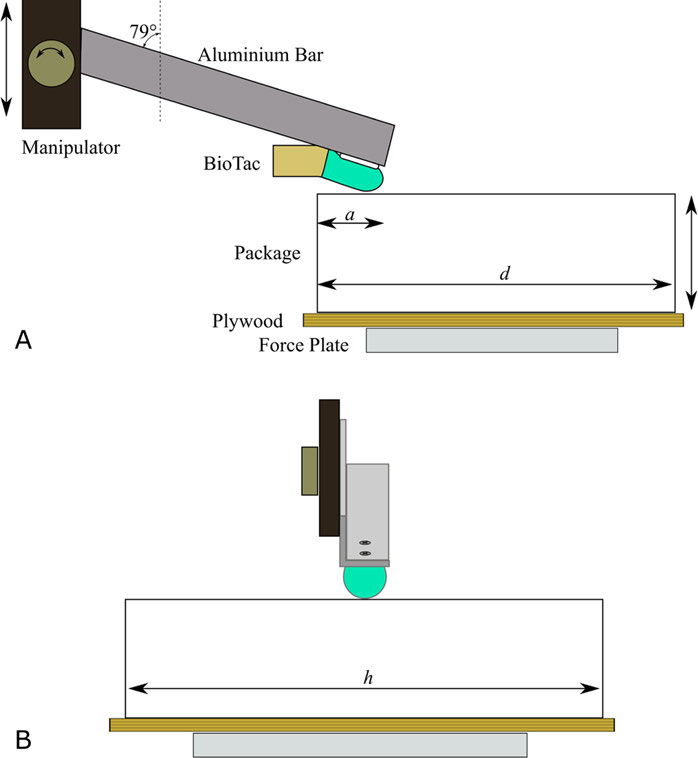
实验装置(图3)包括配备数据采集硬件和软件的 BioTac、AMTI六轴力板及其配套的数据采集设备(NI6218)和数据采集软件(NI LabView)。BioTac通过螺丝固定在一根铝条上,这些螺丝替换了原本用于固定其指甲的螺丝。铝条与垂直线之间的角度为79°。该角度使得BioTac核心的平面部分(见下文进一步讨论)在未发生变形前与包装保持平行。铝条连接到一个可实现垂直移动的操纵器上。一块厚胶合板片通过双面胶带固定在力板上,以扩大放置包装的区域,确保整个包装都能得到支撑。
BioTac使用标准采样序列。顺序为低通滤波压力(P DC)、温度导数(T AC)、温度(T DC)和电极阻抗(E 1 −E19)。在这些通道的每个采样之间,对高通滤波压力(P AC)进行采样。总采样频率为每秒4400个数据点。
BioTac被缓慢推压至包装的顶面,直到记录到4牛顿的静态垂直力。距包装边缘的距离 a 在两个值之间变化(18和22毫米),反映了人类探索中可能的变化范围。在这两个距离下,4牛顿力作用时的BioTac感知数据通常重叠,如结果部分所示。
数据采集在两台不同的计算机上进行。一台计算机采集BioTac的信号,另一台计算机采集力板的信号。这些信号通过一个自定义编程的BioTac板进行同步,该板发送一个100Hz的时钟信号,用于触发电机上的 NI6218板进行数据采集。
在某些实验中,由于未知原因触发功能失效,导致力板数据滞后于BioTac数据。外部时钟仍然保持了样本的等间距。在这种情况下,通过目视检查垂直力和 BioTac压力信号的图形对数据进行了重新对齐。估计精度为20ms(两个样本),略低于自动同步的精度,自动同步应至少精确到 ±5ms(半个样本)。
BioTac测量
仅分析了BioTac的电极和P DC 信号。P AC 未被研究,因为它完全由压缩速率的变化主导。本研究对热敏电阻信号不感兴趣。我们特别关注位于刚性核心平坦区域的电极7–10,该区域模拟了人类远节指骨的顶端簇。这些电极测得的电压与电极和覆盖皮肤之间被挤压的导电液体的阻抗成反比。研究表明,当手指按压平面时,这些电压会受到平面微小倾斜的强烈影响,类似于人类在精细抓握过程中顶端簇所假定的感觉功能(Su et al. 2016)。当 BioTac核心上的平面与被按压表面接近平行对齐时,这种现象尤为明显。
Su 等人 (2012) 表明,PDC 取决于表面的顺应性。在当前情况下,我们必须考虑纸板的结构刚度。这取决于材料的抗弯强度以及包装的几何结构。由于克重和环压强度(SCT)均与材料的弯曲刚度高度相关,因此我们不期望在回归模型中区分这三者。由于顺应性已被证明与 PDC 相关,因此在模型中引入抗弯强度而非 SCT、克重或其他相关量是合理的。我们的首次尝试采用了普通最小二乘模型:
$$
\hat{P}
{DC} = c_0 + c_w w + c_d d + c_a a + c
{BR} BR \tag{1}
$$
其中,帽子符号表示估计值,w、d和a在图3中定义,BR为几何平均弯曲阻力。进一步检查Su等人 (2012)的数据,可以看出压力与A型硬度计之间存在线性关系。对于均质材料,A型硬度计与杨氏模量的对数具有近似的线性关系(Qi等人 2003)。对于薄纸板包装而言,杨氏模量并不适用,但我们可以使用结构刚度代替。如果将面板视为长度为L、弯曲刚度为EI的简支梁简化模型,则在距离其中一个支座a的位置处的顺应性,即刚度的倒数,为
$$
\frac{\delta}{P} = \frac{a^2 (L - a)^2}{3LEI} \tag{2}
$$
在当前情况下,a与L相比很小,因此包含因子w、h、a和BR的纯乘法模型可能非常适合用于估计顺应性。因此,我们对所有解释变量取对数,但不对预测变量取对数。
最终模型变为
$$
\hat{P}
{DC} = c_0 + c_w \log w + c_h \log h + c_a \log a + c
{BR} \log BR \tag{3}
$$
为了完整性,结果中考虑了这两个模型。相同的模型结构也被用于电极7–10的总和。
线性判别分析(LDA)
线性判别分析(LDA)是一种监督式降维方法,旨在寻找原始特征空间中的线性子空间,以最大化类别间的差异。与主成分分析(PCA)这种相关的无监督降维方法相比,LDA仅保留有意义的方差,即具有预测能力的方差(Hastie et al. 2001)。
在这种情况下,我们使用LDA来确定哪些电极在区分由不同弯曲刚度纸板制成的包装时具有信息性。尽管我们已经提出了相关假设并展示了与弯曲刚度的相关性,但我们希望验证这些电极是否确实具有最强的解释能力。我们首先对数据集应用了缩放变换,使均值为零且所有方差为1。然后应用LDA,将每种包装与克重的组合定义为一个类别,忽略a上的差异。这将确保提取出的组合特征对a的微小差异具有鲁棒性,这很有用,因为该维度的对齐很难做到精确。
LDA 做出了一个重要假设,即所有类别的协方差矩阵都是相同的。考虑到我们每个类别的样本相对较少,没有足够的数据来可靠地估计类别之间的差异,因此这一假设应该是合理的。
结果与讨论
当总力达到4N且包装上尚未出现可见损伤时,对 BioTac的数据进行了快照评估。图4和图5分别显示了P DC以及电极7至10之和(该项对应于包装表面相对于包装支撑边缘倾斜时最为敏感)的结果。这两个变量呈现出相似的趋势。不同数据序列之间的水平差异可通过回归中的几何项加以解释。当包装更硬时,P DC 的值较低。
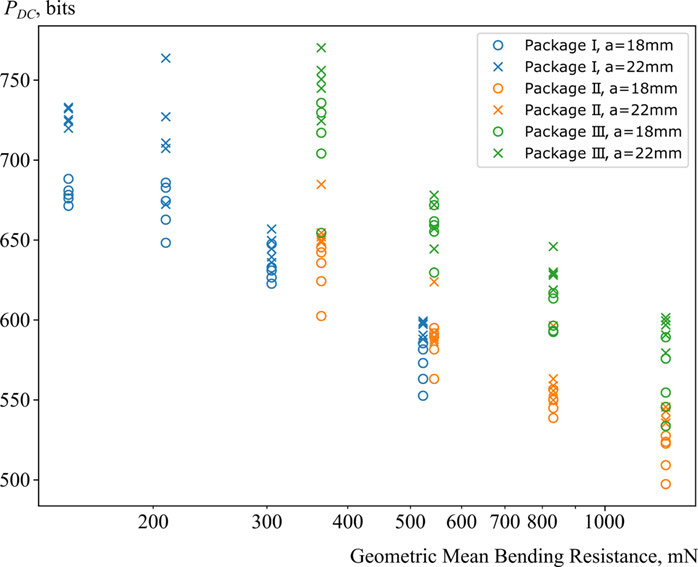
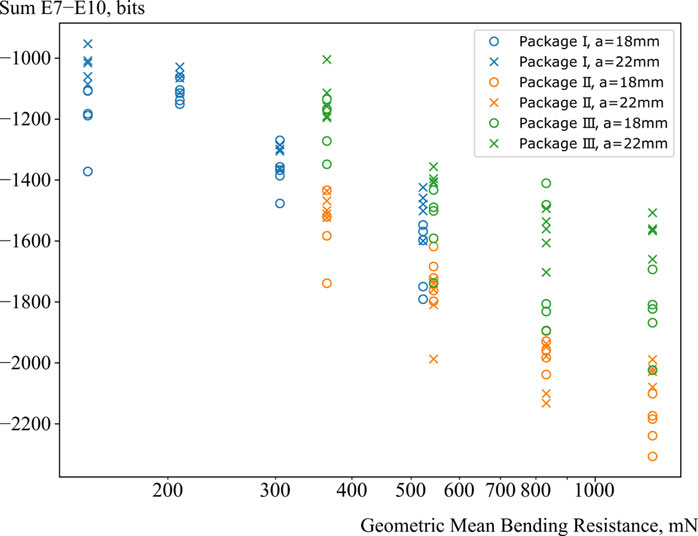
PDC在给定力下本质上是接触面积的度量。增加弯曲刚度会减小接触面积,从而导致更低的PDC。可以通过BioTac皮肤更局部的位移来解释。如果纸板更容易弯曲,它会包覆BioTac,力将通过BioTac内部的流体传递,从而增加压力。而在更刚性的表面上,人工指尖发生变形,外层皮肤与核心直接接触。此时力可以直接传递,而不会增加流体内的压力。这也可以从尖端电极测得的阻抗增加中看出。这些结果与Su等人之前报道的结果一致(2012年),他们在测量BioTac在接触不同顺应性的橡胶时的响应,并发现了顺应性与PDC之间的类似关系。
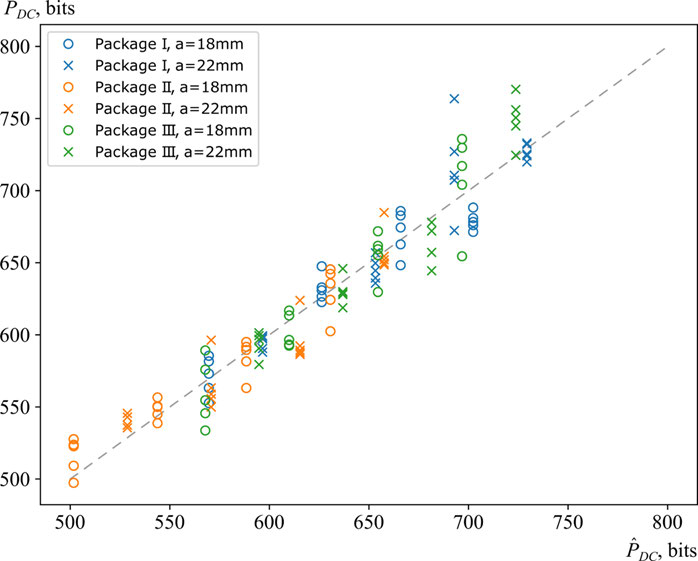
总体而言,通过PDC和电极总和测量,三种包装可以很容易地区分开来,参见图4和图5,其中蓝色、橙色和绿色标记形成了分离的聚类。接触点距包装边缘的距离 a 的影响相对较小。普通最小二乘法显示,所有测试预测因子的系数在 p< 0.001 水平上均显著。拟合系数及其置信区间总结于表3中。最后,图6展示了测量值与拟合的P DC之间的比较。该图表明大部分方差已被解释,仅在最低抗弯强度时例外,对应最高的P DC。这表明该设备的灵敏度可能存在一个下限,相当于传感器被完全包覆的情况,类似于完全柔性的膜所产生的效果。
表3: 普通最小二乘回归的结果。所有系数均显著不为零(p< 0.001)。±表示95%置信区间。参见方程(1)和(3)中关于回归参数的定义。
| 参数 | PDC(线性) | PDC(对数) | E7+E8+E9+E10(线性) | E7+E8+E9+E10(对数) |
|---|---|---|---|---|
| c₀ | 223 ± 82 | -772 ± 235 | -3641 ± 418 | -9109 ± 1384 |
| c_BR | -0.159 ± 0.017 | -105 ± 7 | -0.668 ± 0.086 | -440 ± 42 |
| c_w | 3.23 ± 0.54 | 264 ± 28 | 15.3 ± 2.7 | 1174 ± 167 |
| c_d | 0.912 ± 0.221 | 107 ± 21 | 6.77 ± 1.12 | 799 ± 121 |
| c_a | 6.79 ± 2.37 | 134 ± 33 | 24.2 ± 12.1 | 478 ± 196 |
| R² | 0.833 | 0.917 | 0.844 | 0.896 |
选择4 N的评估力是为了接近人类在提起第一阶段最轻的包装(即包装I,重量约为400克)时拇指所施加的力。尽管另外两个包装需要更大的力来提起,但我们选择使用相同的力,以便能够轻松比较数值。人类倾向于最初施加最小的预估抓握力,然后根据与重量相关的感官信息进行调整,以在提升过程中保持稳定抓握(Johansson和Flanagan 2008)。
线性判别分析
图7展示了第一判别函数系数的可视化,该函数解释了85%的方差。LDA证实最重要的传感器是压力传感器和尖端电极7–10。然而,尖端电极的系数应具有交替符号,从而有效计算远端方向上的二阶空间导数。这一分析为我们选择深入研究的传感器提供了严谨的依据。
这与以下观点非常吻合:类似于人类在进行精细抓握时顶端簇所假定的感觉功能,这些电极对它们与表面形成的角度具有很强的敏感性(Su 等人,2016)。
电极8和9的系数在幅度上的差异可能是由于所测试包装结构的不对称性所致。通常情况下,没有理由认为会存在某种偏好的不对称方向,因此可以认为,在设计一种通用方法时,应将这些电极的系数约束为相等。
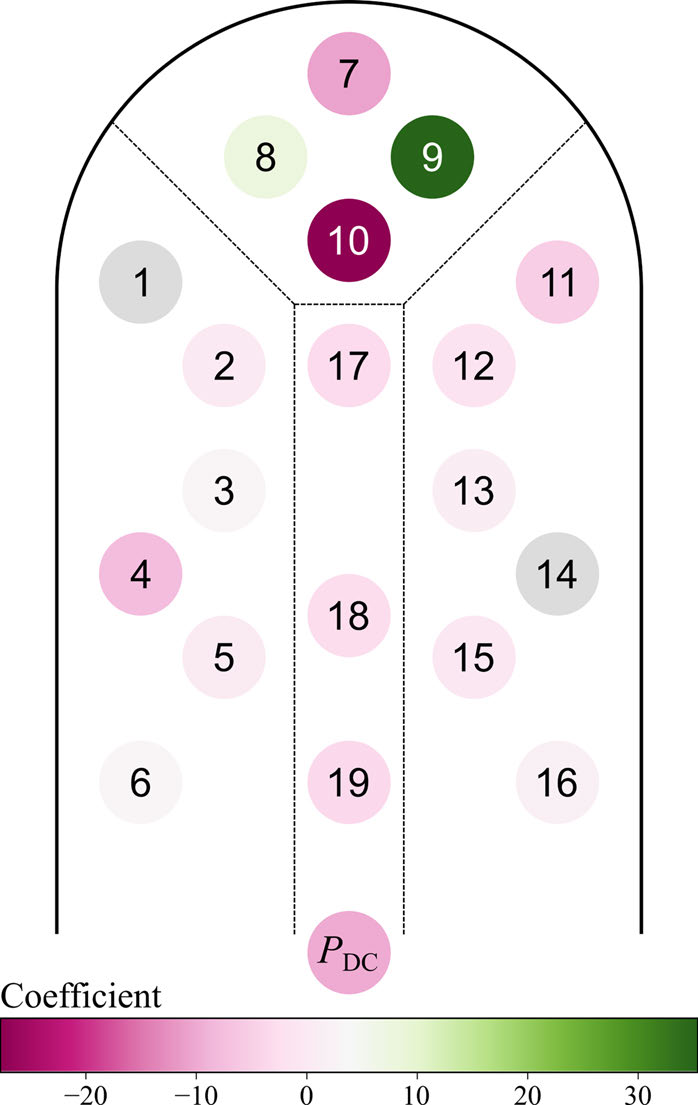
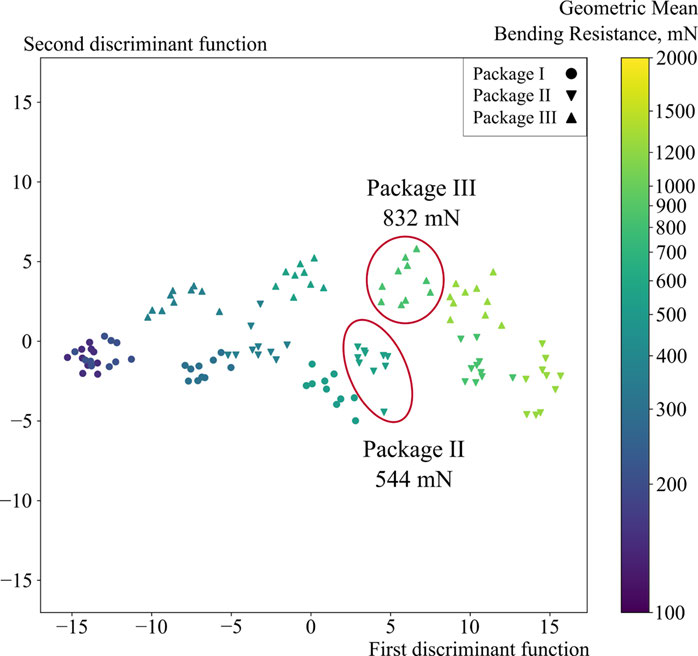
图8显示了样本在前两个判别函数所张成空间中的投影。LDA算法已根据板的刚度对样本进行了排序。比较瓶子包装,相同材料下大瓶包装的刚度低于小瓶包装。例如,较小的包装由材料F制成的包装II在第一判别式中与由材料G制成的较大包装(包装III)排名相近,尽管材料F的抗弯强度仅为材料G的65%。需要注意的是,训练数据的标签并未包含类别按刚度或其他指标的明确排序。因此,算法能够按刚度对类别进行排序,表明该信息是从触觉传感器数据中推断得出的。
进一步工作
需要进一步工作,以提高该方法的可靠性,并将其结果与人类感知和偏好相关联。一种在已知的恒定速度或逐渐增加的力下按压手指的自动化方法将能够解读PAC信号,从而揭示纸板内部的突然事件(如起皱)。同时,这也会使其他信号更加可靠,因为纸板是一种速率相关材料,而非纯弹性材料。
如果将此处所述方法与手指的总位移和力的测量相结合,或许可以以更接近人类感知的方式(Bergmann Tiest和Kappers 2009年)整合皮肤的和动觉的信息。
研究力逐渐增加以稳定抓握更重包装时随时间变化的数据也将十分有趣。这种分析可能比早期方法提供更多消息。例如,有可能追踪诸如压痕质量等因素的影响,以及局部屈服等瞬态事件。
结论
我们已经证明,可以使用BioTac传感器对纸板包装的顺应性进行排序。低通滤波压力和电极阻抗均与接触点周围局部顺应性预测因子相关。其由可移动液体浆料充气的弹性体皮肤与测试物体的相互作用可能比刚性探针更具仿生性。
我们已经发现,可以从BioTac构建一个特征,该特征能够利用BioTac尖端的四个电极和低通滤波压力信号对包装的顺应性进行排序。
仅通过力上升阶段单个时间点的电极和压力结果,即可区分不同的包装和材料。这对于进一步分析来自各个电极的信号具有重要意义。

















 1289
1289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









