









 本文探讨了噪声、概率目标、误差度量及其在机器学习中的应用。讲解了如何用P(y|x)替代f(x),讨论了噪声类型,包括标签噪声和特征噪声。文章深入分析了确定性和概率性分布,以及它们对理想最小目标的影响。同时,介绍了误差测量方法,如0/1误差和平方误差,并解释了它们如何影响目标函数。此外,还讨论了算法误差度量的选择,以及加权分类在处理不平衡数据集时的作用。
本文探讨了噪声、概率目标、误差度量及其在机器学习中的应用。讲解了如何用P(y|x)替代f(x),讨论了噪声类型,包括标签噪声和特征噪声。文章深入分析了确定性和概率性分布,以及它们对理想最小目标的影响。同时,介绍了误差测量方法,如0/1误差和平方误差,并解释了它们如何影响目标函数。此外,还讨论了算法误差度量的选择,以及加权分类在处理不平衡数据集时的作用。
文章目录
Lecture 8: Noise and Error
Noise and Probabilistic Target
can replace
f
(
x
)
f(x)
f(x) by
P
(
y
∣
x
)
P(y|x)
P(y∣x)
Noise
noise in y, i.e. good customer, ‘mislabeled’ as bad.
noise in y: i.e. same customers, different labels.
noise in x: i.e. inaccurate customer information.
Probabilistic Target
Deterministic Distribution
x
∼
P
(
x
)
y
=
f
(
x
)
with
P
(
y
∣
x
)
=
1
i
.
e
.
P
(
o
∣
x
)
=
1
,
P
(
×
∣
x
)
=
0
\begin{array}{l} \mathbf{x} \sim P(\mathbf{x}) \\ y = f(\mathbf{x}) \ \text{with} \ P(y | \mathbf{x}) = 1 \\ i.e. P(o | \mathbf{x})=1, P( \times | \mathbf{x})=0 \end{array}
x∼P(x)y=f(x) with P(y∣x)=1i.e.P(o∣x)=1,P(×∣x)=0
Probabilistic Distribution
x
∼
P
(
x
)
y
=
f
(
x
)
with
0
≤
P
(
y
∣
x
)
≤
1
i
.
e
.
P
(
o
∣
x
)
=
0.7
,
P
(
×
∣
x
)
=
0.3
\begin{array}{l} \mathbf{x} \sim P(\mathbf{x}) \\ y = f(\mathbf{x}) \ \text{with} \ 0\ \le P(y | \mathbf{x}) \le 1 \\ i.e. P(o | \mathbf{x})=0.7, P( \times | \mathbf{x})=0.3 \end{array}
x∼P(x)y=f(x) with 0 ≤P(y∣x)≤1i.e.P(o∣x)=0.7,P(×∣x)=0.3
之前阐述的决定分布是概率分布的一种特殊情况(
P
(
y
∣
x
)
=
1
P(y | \mathbf{x}) = 1
P(y∣x)=1)。
现在是在概率分布 P ( y ∣ x ) P(y | \mathbf{x}) P(y∣x)中学习,包含 f ( x ) f(\mathbf{x}) f(x)和噪音(noise)。

只是在原有的数据分布中,加上条件概率,不影响原来VC Bound的推导及使用。
Fun Time
Let’s revisit PLA/pocket. Which of the following claim is true?
1 In practice, we should try to compute if
D
D
D is linear separable before deciding to use PLA.
2 If we know that
D
D
D is not linear separable, then the target function
f
f
f must not be a linear function.
3 If we know that
D
D
D is linear separable, then the target function
f
f
f must be a linear function.
4 None of the above
✓
\checkmark
✓
Explanation
1 如果我们可以计算
D
D
D是否线性可分,那么就能直接获取
W
∗
W^*
W∗,就无需使用PLA算法。
2 数据集线性不可分,可能存在噪音,真实数据集线性可分
3 数据集线性可分,可能收集的数据少*,存在巧合,并不一定说明目标函数一定是线性函数。?
Error Measure
E
i
n
(
g
)
=
1
N
∑
n
=
1
N
err
(
g
(
x
n
)
,
f
(
x
n
)
)
E
out
(
g
)
=
E
x
∼
P
err
(
g
(
x
)
,
f
(
x
)
)
E_{\mathrm{in}}(g)=\frac{1}{N} \sum_{n=1}^{N} \operatorname{err}\left(g\left(\mathbf{x}_{n}\right), f\left(\mathbf{x}_{n}\right)\right) \\ E_{\text {out}}(g)=\underset{\mathbf{x} \sim P}{\mathcal{E}} \operatorname{err}(g(\mathbf{x}), f(\mathbf{x}))
Ein(g)=N1n=1∑Nerr(g(xn),f(xn))Eout(g)=x∼PEerr(g(x),f(x))
训练数据是有限的,使用离散分布列计算平均损失。
预测数据是无限的,使用概率分布计算平均损失。
以后会学到测试数据,我们使用测试数据代替预测数据,来判断学习模型的好坏。
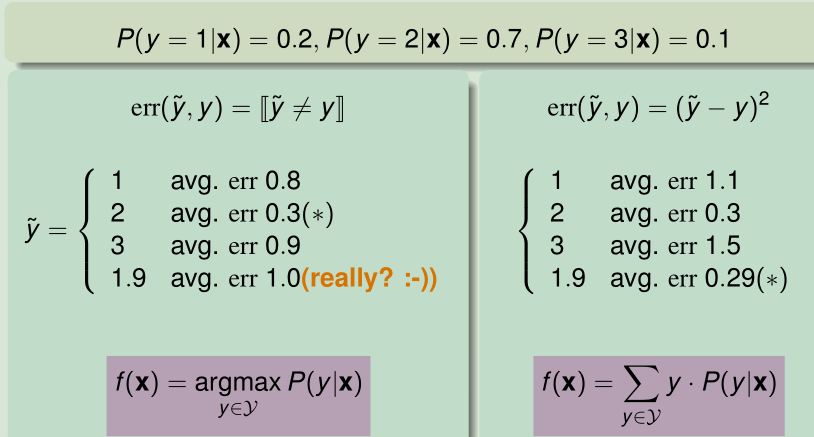
0/1 error
also called classification error.
err
(
y
~
,
y
)
=
[
y
~
≠
y
]
f
(
x
)
=
argmax
y
∈
Y
P
(
y
∣
x
)
\operatorname{err}(\tilde{y}, y)=[\tilde{y} \neq y] \\ f(\mathbf{x})=\underset{y \in \mathcal{Y}}{\operatorname{argmax}} P(y | \mathbf{x})
err(y~,y)=[y~̸=y]f(x)=y∈YargmaxP(y∣x)
squared error
err ( y ~ , y ) = ( y ~ − y ) 2 f ( x ) = ∑ y ∈ Y y ⋅ P ( y ∣ x ) \operatorname{err}(\tilde{y}, y)=(\tilde{y}-y)^{2} \\ f(\mathbf{x})=\sum_{y \in \mathcal{Y}} y \cdot P(y | \mathbf{x}) err(y~,y)=(y~−y)2f(x)=y∈Y∑y⋅P(y∣x)
affect ‘ideal’ target
Ideal Mini-Target
P ( y ∣ x ) P(y | \mathbf{x}) P(y∣x) and err measure define ideal mini-target f ( x ) f(\mathbf{x}) f(x).

A
A
A根据损失衡量方法,选择假设
g
g
g.
Fun Time
Consider the following P(y|x) and err(˜ y,y)|˜ y − y|. Which of the following is the ideal mini-target f(x)?
P
(
y
=
1
∣
x
)
=
0.10
,
P
(
y
=
2
∣
x
)
=
0.35
P
(
y
=
3
∣
x
)
=
0.15
,
P
(
y
=
4
∣
x
)
=
0.40
\begin{array}{l} {P(y=1 | \mathbf{x})=0.10, P(y=2 | \mathbf{x})=0.35} \\ {P(y=3 | \mathbf{x})=0.15, P(y=4 | \mathbf{x})=0.40}\end{array}
P(y=1∣x)=0.10,P(y=2∣x)=0.35P(y=3∣x)=0.15,P(y=4∣x)=0.40
1 2.5 = average within
Y
Y
Y = {1,2,3,4}
2 2.85 = weighted mean from
P
(
y
∣
x
)
P(y | \mathbf{x})
P(y∣x)
3 3 = weighted median from
P
(
y
∣
x
)
P(y | \mathbf{x})
P(y∣x)
✓
\checkmark
✓
4 4 =
argmax
y
∈
Y
P
(
y
∣
x
)
\underset{y \in \mathcal{Y}}{\operatorname{argmax}} P(y | \mathbf{x})
y∈YargmaxP(y∣x)
Explanation
2.5, 2.85, 3, 4的损失目标值分别为1.0, 0.965, 0.95, 1.15.
其实对于绝对值损失衡量方法,最小目标值为中位数计算所得。
至于原因,大家进行一下思维实验。
现在以中位数计算得到目标值,由于中位数本身占了一定比例,左边+中位数>右边,若往左移,目标值会增大;同理往右移亦然。?
# 计算绝对值损失
def count_absolute_loss(pros, value):
loss = 0
for p, v in pros:
loss += p * math.fabs(v-value)
return loss
if __name__ == '__main__':
pros = [(0.1, 1), (0.35, 2), (0.15, 3), (0.4, 4)]
print(count_absolute_loss(pros, 2.5)) # 1.0
print(count_absolute_loss(pros, 2.85)) # 0.965
print(count_absolute_loss(pros, 3)) # 0.95
print(count_absolute_loss(pros, 4)) # 1.15
Algorithmic Error Measure
Choice of Error Measure
two types of error: false accept and false reject
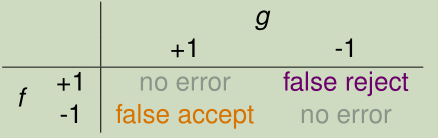
g g g是预测值, f f f是真实值,我们以预测值做决策。
PF:g = +1,f = -1, 错误的接受;
NT:g = -1,f = +1, 错误的拒绝;
0/1 error penalizes both types equally.
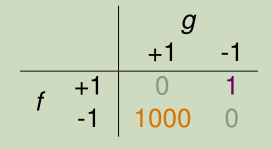
Fingerprint Verification for Supermarket
对于超市促销活动来说,错误拒绝比错误接受损失大,增大错误拒绝的损失权值(宁可多发优惠券,不可寒了顾客的心)。
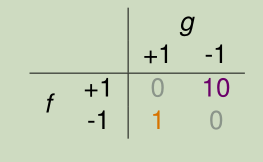
Fingerprint Verification for CIA
对于CIA审核来说,错误接受比错误拒绝损失大,增大错误接受的损失权值(宁可错抓三千,不可漏放一个)。

A
A
A从众多损失衡量方法挑选一个损失衡量方法,并确定损失衡量的权重
e
r
r
^
\widehat{\mathrm{err}}
err
,选择假设
g
g
g.
Fun Time
Consider err below for CIA. What is E in (g) when using this err?
1
1
N
∑
n
=
1
N
[
y
n
≠
g
(
x
n
)
]
\frac{1}{N} \sum \limits_{n=1}^{N}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right]
N1n=1∑N[yn̸=g(xn)]
2
1
N
(
∑
y
n
=
+
1
[
y
n
≠
g
(
x
n
)
]
+
1000
∑
y
n
=
−
1
[
y
n
≠
g
(
x
n
)
]
)
\frac{1}{N}\left(\sum \limits _{y_{n}=+1}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right]+1000 \sum \limits _{y_{n}=-1}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right]\right)
N1(yn=+1∑[yn̸=g(xn)]+1000yn=−1∑[yn̸=g(xn)])
3
1
N
(
∑
y
n
=
+
1
[
y
n
≠
g
(
x
n
)
]
−
1000
∑
y
n
=
−
1
[
y
n
≠
g
(
x
n
)
]
)
\frac{1}{N}\left(\sum \limits _{y_{n}=+1}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right] - 1000 \sum \limits _{y_{n}=-1}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right]\right)
N1(yn=+1∑[yn̸=g(xn)]−1000yn=−1∑[yn̸=g(xn)])
✓
\checkmark
✓
4
1
N
(
1000
∑
y
n
=
+
1
[
y
n
≠
g
(
x
n
)
]
+
∑
y
n
=
−
1
[
y
n
≠
g
(
x
n
)
]
)
\frac{1}{N}\left(1000\sum \limits _{y_{n}=+1}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right] + \sum \limits _{y_{n}=-1}\left[y_{n} \neq g\left(\mathbf{x}_{n}\right)\right]\right)
N1(1000yn=+1∑[yn̸=g(xn)]+yn=−1∑[yn̸=g(xn)])
Explanation
g
g
g是预测值,
f
f
f是真实值
y
n
y_n
yn。
注意下权值。?
Weighted Classification
Cost(Error, Loss)
代价又名错误,损失。
E
i
n
W
(
h
)
=
1
N
∑
n
=
1
N
{
1
if
y
n
=
+
1
1000
if
y
n
=
−
1
}
⋅
[
y
n
≠
h
(
x
n
)
]
E_{\mathrm{in}}^{\mathrm{W}}(h)=\frac{1}{N} \sum_{n=1}^{N} \left\{\begin{array}{cc}{1} & {\text { if } y_{n}=+1} \\ {1000} & {\text { if } y_{n}=-1}\end{array}\right\} \cdot\left[y_{n} \neq h\left(\mathbf{x}_{n}\right)\right]
EinW(h)=N1n=1∑N{11000 if yn=+1 if yn=−1}⋅[yn̸=h(xn)]
Systematic Route
Connect E i n w E_{in}^w Einw and E i n 0 / 1 E_{in}^{0/1} Ein0/1.
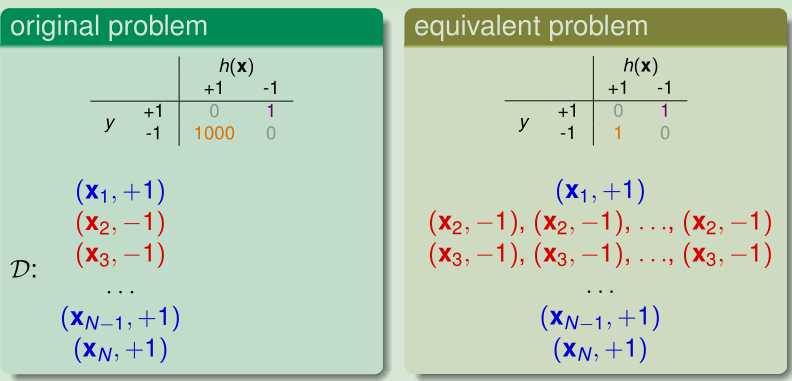
等价于将
y
n
=
−
1
y_n=-1
yn=−1的数据扩大1000倍。
这样在选择到
y
n
=
−
1
y_n=-1
yn=−1的概率增大了。
weighted PLA: 不影响最后的损失偏移(0),若是随机选择数据,会影响PLA的改变过程,导致产生不影响
w
∗
w^*
w∗(话说本来随机PLA每次运行就会产生不同
w
∗
w^*
w∗)。
weighted pocket :影响随机过程(若随机选点),影响最终的
w
∗
w^*
w∗选择。
Fun Time
Consider the CIA cost matrix. If there are 10 examples with
y
n
y_n
yn = −1 (intruder) and 999,990 examples with
y
n
y_n
yn = +1 (you).
What would
E
i
n
w
(
h
)
E_{\mathrm{in}}^{\mathrm{w}}(h)
Einw(h) be for a constant h(x) that always returns +1?
1 0.001
2 0.01
✓
\checkmark
✓
3 0.1
4 1
Explanation
全猜+1,则有10个数据错误,且权重为1000
10
∗
1000
10
+
999990
=
0.01
\frac{10*1000}{10+999990}=0.01
10+99999010∗1000=0.01
权重可以调整不平衡数据带来的影响(若权重全为1,损失目标为0.00001,调大损失权重后,则会增大倾向选择数据多类别的模型的损失,减少模型对数据多类别的倾向)。
Summary
本篇讲义主要讲了噪音,概率目标,损失函数,以及带权重的模型。
在分布函数 P ( y ∣ x ) P(y | \mathbf{x}) P(y∣x)和低损失 E i n E_{in} Ein下,我们真正能学到模型。
讲义总结
Noise and Probabilistic Target
can replace
f
(
x
)
f(x)
f(x) by
P
(
y
∣
x
)
P(y|x)
P(y∣x)
Error Measure
affect ‘ideal’ target
Algorithmic Error Measure
user-dependent
=
>
=>
=> plausible or friendly
Weighted Classification
easily done by virtual ‘example copying’
参考文献
《Machine Learning Foundations》(机器学习基石)—— Hsuan-Tien Lin (林轩田)

















 285
285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









