




P1002 [NOIP 2002 普及组] 过河卒 c++题解
题目链接
P1002 [NOIP 2002 普及组] 过河卒
题目描述
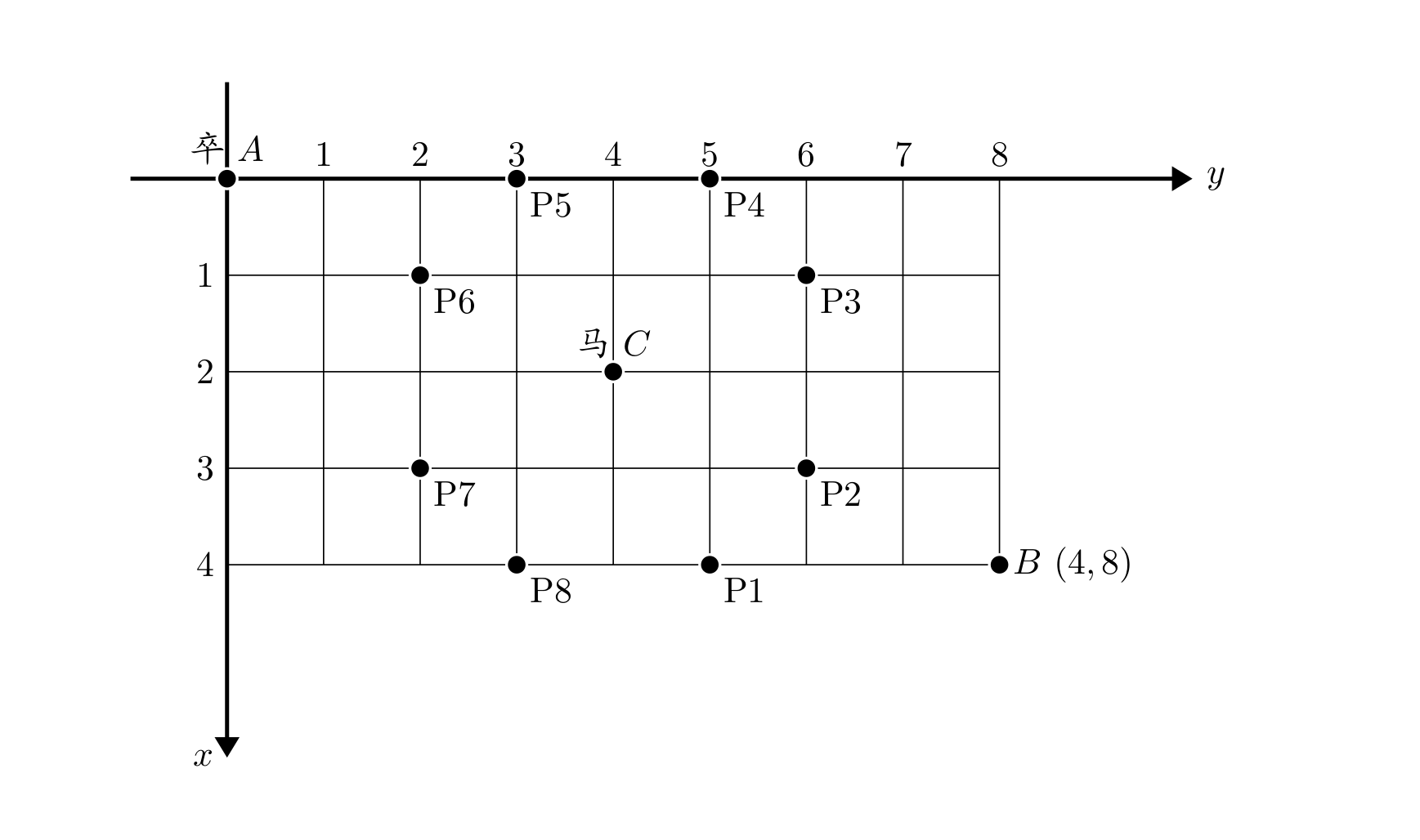
棋盘上 A A A 点有一个过河卒,需要走到目标 B B B 点。卒行走的规则:可以向下、或者向右。同时在棋盘上 C C C
点有一个对方的马,该马所在的点和所有跳跃一步可达的点称为对方马的控制点。因此称之为“马拦过河卒”。棋盘用坐标表示, A A A 点 ( 0 , 0 ) (0, 0) (0,0)、 B B B 点 ( n , m ) (n, m) (n,m),同样马的位置坐标是需要给出的。
现在要求你计算出卒从 A A A 点能够到达 B B B 点的路径的条数,假设马的位置是固定不动的,并不是卒走一步马走一步。
输入格式
一行四个正整数,分别表示 B B B 点坐标和马的坐标。
输出格式
一个整数,表示所有的路径条数。
输入输出样例 #1
输入 #1
6 6 3 3输出 #1
6说明/提示
对于 100 % 100 \% 100% 的数据, 1 ≤ n , m ≤ 20 1 \le n, m \le 20 1≤n,m≤20, 0 ≤ 0 \le 0≤ 马的坐标 ≤ 20 \le 20 ≤20。
【题目来源】
NOIP 2002 普及组第四题
1.题目内容
这道题目是NOIP2002普及组的经典动态规划问题,要求计算棋盘上卒从起点A(0,0)到终点B(n,m)的合法路径数,需避开马的控制点
2.难度
- 普及−
3.题目所需知识点
- 动态规划 DP
- 深度优先搜索 DFS
4. 思路
动态规划解法(标准解法)
- 定义dp[i][j]表示从起点(0,0)到(i,j)的路径数,状态转移方程为: dp[i][j] = dp[i-1][j] + dp[i][j-1] 需预先标记马的控制点(马的位置及其8个跳跃点)为不可达区域。
记忆化搜索解法(递归思路)
- 从终点(n,m)反向递归,记录已计算子问题的结果。
注:需配合剪枝和记忆化数组
数学组合数解法(特殊场景)
当马的控制点不影响主要路径时,可用组合数公式:
C(n+m, n)表示从(0,0)到(n,m)的总路径数。
限制 需额外处理被马阻挡的路径,实际应用较少。
广度优先搜索(BFS)变种
- 队列存储待处理坐标。
- 从起点出发扩展右/下节点。
- 累计到达终点的路径数。
关键注意事项
- 必须使用long long,20x20棋盘路径数可达10级别。
边界处理
马的控制点需检查数组越界。
起点/终点重合需特判。
三种方法对比:
动态规划解法:
优势:
空间效率高:仅需二维数组存储状态(约0.5MB)。
边界处理简单:通过坐标偏移避免越界(整体+2) 。
局限:
需严格处理马控点标记逻辑。
记忆化搜索:
优势:
逻辑直观:符合路径搜索的自然思维 。
自动剪枝:遇到马控点立即终止递归 。
局限:
栈溢出风险:n=m=20时递归深度达40层,可能超限 效率较低:递归调用开销比DP高5倍以上。
广度优先搜索:
优势:
路径追踪能力:天然支持记录完整路径 。
易处理动态障碍:适合马移动的变种问题。
局限:
空间爆炸:队列可能存储O(2ⁿ)级节点(n=20时超百万)。
时间效率最低:实测n=m=15即可能超时。
组合数学解法:
优势:
理论最快:无循环计算,O(1)时间复杂度。
学术价值高:展示动态规划与组合数学的关联。
局限:
实现复杂:需容斥原理排除多障碍点路径。
实用性低:马控点破坏路径连续性,公式难以修正。
故本题为动态规划解法讲解。其他提供代码,不做过多讲解
5.复杂度分析
时间复杂度
| 方法 | 时间复杂度 | 计算量示例 (n=m=20) | 计算过程说明 |
|---|---|---|---|
| 动态规划 | O(n×m) | 400次 | 双层循环遍历整个棋盘 |
| 记忆化搜索 | O(n×m) | 400~800次 | 每个状态计算一次,但有递归开销 |
| BFS | O(2^(n+m)) | ≈ 2⁴⁰ ≈ 10¹²次 | 最坏情况需遍历所有可能路径 |
| 组合数学 | O(k²)或O(1)理论 | 9²=81次 (k为障碍数) | 容斥原理处理障碍点 |
空间复杂度
| 方法 | 空间复杂度 | 内存消耗示例 (n=m=20) | 主要存储结构 |
|---|---|---|---|
| 动态规划 | O(n×m) | 400个long long (3KB) | dp二维数组 |
| 记忆化搜索 | O(n×m)+O(n+m) | 400单元+调用栈40层 | memo数组+递归栈 |
| BFS | O(2^(n/2)) | ≈ 2²⁰ ≈ 100万节点 | 队列存储节点 |
| 组合数学 | O(1)或O(k) | 9个点坐标 (144字节) | 障碍点坐标集合 |
6.动态规划解法详解
问题分析
- 目标:计算卒从起点 (0,0) 到达终点 (n,m) 的路径条数。
- 移动规则:卒只能向下或向右移动。
- 障碍点:对方的马所在位置及其跳跃可达的 8 个控制点(共 9 个点),卒不能经过这些点。
- 关键:使用动态规划(DP)记录到达每个点的路径数,避开障碍点。
动态规划步骤
1.标记马的控制点
- 给定马的位置 (x,y),计算其 8 个控制点(马走“日”字):
(x-2, y-1), (x-2, y+1),
(x-1, y-2), (x-1, y+2),
(x+1, y-2), (x+1, y+2),
(x+2, y-1), (x+2, y+1)
包括马自身位置 (x,y)。
即下图中标红区域不能走

-
使用布尔数组 is_obstacle[i][j] 标记所有控制点(若坐标在 [0,n]×[0,m] 范围内)。
DP 状态定义 -
定义 dp[i][j]:从 (0,0) 到达 (i,j) 的路径条数。
2.边界初始化
-
起点 (0,0):
- 若 (0,0) 是障碍点,则 dp[0][0] = 0(无路径)。
- 否则 dp[0][0] = 1。
-
第一行 (i=0, j>0):
- 只能从左侧向右移动:
- dp[0][j] = dp[0][j-1](若 (0,j) 无障碍)。
-
若遇到障碍点,则 dp[0][j] = 0,且后续点均为 0(无法到达)。
-
第一列 (j=0, i>0):
- 只能从上方向下移动:
- dp[i][0] = dp[i-1][0](若 (i,0) 无障碍)。
- 若遇到障碍点,则 dp[i][0] = 0,后续点为 0。
3.状态转移方程
- 对于非边界点 (i > 0, j > 0):
- 若 (i,j) 是障碍点,则 dp[i][j] = 0。
- 否则,路径来自上方或左侧:
dp[i][j] = dp[i-1][j] + dp[i][j-1]。
4.遍历顺序
- 按行遍历(从左到右,从上到下):
- 根据边界或转移方程计算 dp[i][j]
注意:计算 dp[i][j] 前需确保 dp[i-1][j] 和 dp[i][j-1] 已计算。
5.输出结果
- 最终答案:dp[n][m](终点路径数)。
7.代码片段分析
- 初始化棋盘和dp数组(long long防溢出)
long long dp[21][21]={0};
bool danger[21][21]={false};
- 定义马的控制点偏移量(8个方向+马自身)
int dir[9][2]={{1,2},{1,-2},{-1,2},{-1,-2},
{2,1},{2,-1},{-2,1},{-2,-1},
{0,0}}; // 最后一个是马本身
- 标记所有危险点(马的控制点)
for (int i=0; i<9; i++){ //遍历9个方向(马自身位置+8个控制点)
int nx=x+dir[i][0]; //dir[i][0]和dir[i][1]存储方向偏移量
int ny=y+dir[i][1];
if (nx>=0 && nx<=n && ny>=0 && ny<=m){ //边界检查
danger[nx][ny]=true;
}
}
- 初始化起点(0,0)
if (danger[0][0]){
dp[0][0] = 0; // 如果起点是危险点,则路径数为0
}
else{
dp[0][0] = 1; // 否则起点路径数为1(唯一初始路径)
}
- 动态规划填表
for (int i=0; i<=n; i++){
for (int j=0; j<=m; j++){
if (danger[i][j]) continue; // 跳过危险点
// 如果不是第一行,累加上方路径数
if (i>0) dp[i][j]+=dp[i-1][j];
// 如果不是第一列,累加左侧路径数
if (j>0) dp[i][j]+=dp[i][j-1];
}
}
- 输出终点的路径总数
cout<<dp[n][m];
其他解法
1. 记忆化搜索(递归+缓存)
#include <iostream>
#include <cstring>
using namespace std;
// 马的控制点坐标偏移量(8个方向)
const int dx[] = {-2, -1, 1, 2, 2, 1, -1, -2};
const int dy[] = {1, 2, 2, 1, -1, -2, -2, -1};
long long dp[25][25]; // 记忆化数组
bool danger[25][25]; // 标记危险点
long long dfs(int x, int y, int n, int m) {
// 越界或危险点返回0
if (x > n || y > m || danger[x][y]) return 0;
// 到达终点返回1
if (x == n && y == m) return 1;
// 已计算过直接返回
if (dp[x][y] != -1) return dp[x][y];
// 递归计算向右和向下的路径和
return dp[x][y] = dfs(x + 1, y, n, m) + dfs(x, y + 1, n, m);
}
int main() {
int n, m, x, y;
cin >> n >> m >> x >> y;
memset(dp, -1, sizeof(dp));
// 标记马的控制点
danger[x][y] = true;
for (int i = 0; i < 8; i++) {
int nx = x + dx[i], ny = y + dy[i];
if (nx >= 0 && ny >= 0) danger[nx][ny] = true;
}
cout << dfs(0, 0, n, m);
return 0;
}
2. 广度优先搜索(BFS)
#include<iostream>
#include <queue>
using namespace std;
const int dx[] = {-2, -1, 1, 2, 2, 1, -1, -2};
const int dy[] = {1, 2, 2, 1, -1, -2, -2, -1};
struct Node { int x, y; };
int main() {
int n, m, x, y;
cin >> n >> m >> x >> y;
bool danger[25][25] = {false};
long long cnt[25][25] = {0};
// 标记马的控制点
danger[x][y] = true;
for (int i = 0; i < 8; i++) {
int nx = x + dx[i], ny = y + dy[i];
if (nx >= 0 && ny >= 0) danger[nx][ny] = true;
}
queue<Node> q;
if (!danger[0][0]) {
q.push({0, 0});
cnt[0][0] = 1;
}
while (!q.empty()) {
Node cur = q.front(); q.pop();
// 向右移动
if (cur.x + 1 <= n && !danger[cur.x + 1][cur.y]) {
if (cnt[cur.x + 1][cur.y] == 0) q.push({cur.x + 1, cur.y});
cnt[cur.x + 1][cur.y] += cnt[cur.x][cur.y];
}
// 向下移动
if (cur.y + 1 <= m && !danger[cur.x][cur.y + 1]) {
if (cnt[cur.x][cur.y + 1] == 0) q.push({cur.x, cur.y + 1});
cnt[cur.x][cur.y + 1] += cnt[cur.x][cur.y];
}
}
cout << cnt[n][m];
return 0;
}
3.组合数学解法
#include <iostream>
#include <vector>
using namespace std;
// 马的控制点坐标偏移量(8个方向)
const int dx[] = {-2, -1, 1, 2, 2, 1, -1, -2};
const int dy[] = {1, 2, 2, 1, -1, -2, -2, -1};
// 计算组合数C(a,b) = a! / (b! * (a-b)!)
long long comb(int a, int b) {
if (b < 0 || b > a) return 0;
b = min(b, a - b); // 利用对称性减少计算量
long long res = 1;
for (int i = 1; i <= b; i++) {
res = res * (a - b + i) / i; // 逐项计算避免溢出
}
return res;
}
int main() {
int n, m, x, y;
cin >> n >> m >> x >> y;
// 标记所有危险点(马的位置+控制点)
vector<vector<bool> > danger(n + 1, vector<bool>(m + 1, false));
danger[x][y] = true;
for (int i = 0; i < 8; i++) {
int nx = x + dx[i], ny = y + dy[i];
if (nx >= 0 && nx <= n && ny >= 0 && ny <= m) {
danger[nx][ny] = true;
}
}
// 检查起点或终点是否被阻挡
if (danger[0][0] || danger[n][m]) {
cout << 0;
return 0;
}
// 总路径数 = C(n+m, n)
long long total = comb(n + m, n);
// 减去经过危险点的路径数
for (int i = 0; i <= n; i++) {
for (int j = 0; j <= m; j++) {
if (danger[i][j]) {
// 从(0,0)到(i,j)的路径数 × 从(i,j)到(n,m)的路径数
long long bad = comb(i + j, i) * comb(n - i + m - j, n - i);
total -= bad;
}
}
}
cout << total;
return 0;
}
8.AC代码
#include <bits/stdc++.h>
using namespace std;
int n, m, x, y;
int main(){
// 输入棋盘大小(n,m)和马的位置(x,y)
cin>>n >>m>>x>>y;
// 定义马的控制点偏移量(8个方向+马自身)
int dir[9][2]={{1,2},{1,-2},{-1,2},{-1,-2},
{2,1},{2,-1},{-2,1},{-2,-1},
{0,0}}; // 最后一个是马本身
// 初始化棋盘和dp数组(long long防溢出)
long long dp[21][21]={0};
bool danger[21][21]={false};
// 标记所有危险点(马的控制点)
for (int i=0; i<9; i++){ //遍历9个方向(马自身位置+8个控制点)
int nx=x+dir[i][0]; //dir[i][0]和dir[i][1]存储方向偏移量
int ny=y+dir[i][1];
if (nx>=0 && nx<=n && ny>=0 && ny<=m){ //边界检查
danger[nx][ny]=true;
}
}
// 初始化起点(0,0)
if (danger[0][0]){
dp[0][0] = 0; // 如果起点是危险点,则路径数为0
}
else{
dp[0][0] = 1; // 否则起点路径数为1(唯一初始路径)
}
// 动态规划填表
for (int i=0; i<=n; i++){
for (int j=0; j<=m; j++){
if (danger[i][j]) continue; // 跳过危险点
// 如果不是第一行,累加上方路径数
if (i>0) dp[i][j]+=dp[i-1][j];
// 如果不是第一列,累加左侧路径数
if (j>0) dp[i][j]+=dp[i][j-1];
}
}
// 输出终点的路径总数
cout<<dp[n][m];
return 0;
}
如果这些思路都不清楚,那可以听听这个老师讲的:P1002 [NOIP2002 普及组] 过河卒
附 更多的测试样例

9.推荐题目
如果对你理解有帮助,就点个赞再走吧,有问题欢迎随时在评论区指出

















 1489
1489

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









