




01 引言
在老乡鸡菜谱开源之后,很多粉丝朋友觉得菜谱的过程过于简单,甚至不能称之为菜谱。小编又在GitHub上发现了一个通过AI生成各种菜系、菜谱的神仙框架「一饭封神」。
「一饭封神」提供了页面,通过执行食材和菜系,即可生成菜谱,并生成配图。还可以进行营养分析、酒水搭配等操作。对于那些整天不知道吃什么的人来说,简直就是福音。
02 简介

一个基于 AI 的智能菜谱生成平台,支持中华八大菜系 + 国际料理,提供营养分析、酒水推荐、菜谱效果图生成等全方位烹饪指导。
GitHub地址:https://github.com/liu-ziting/what-to-eat
官网地址:https://eat.lz-t.top/
2.1 🚀 核心功能
- 智能菜谱生成 - 基于食材和菜系偏好生成专业菜谱
- 营养分析 - 详细营养成分分析和健康评分
- AI 效果图 - 一键生成精美菜品图片
- 酒水搭配 - 专业侍酒师推荐
- 酱汁设计 - 定制化调料配方
- 收藏管理 - 保存和管理喜爱的菜谱
- 料理占卜 - 趣味性饮食运势
- ⚙️ 配置管理 - 动态配置 AI 模型参数,支持多服务商切换
2.2 🛠️ 技术栈
- 前端框架: Vue 3.4 + Composition API + TypeScript 5.3+
- 样式方案: Tailwind CSS 3.4+
- 构建工具: Vite 5.0+
- AI 服务: 零一万物 Yi-Lightning + 智谱 AI CogView-3-Flash
- 部署平台: Vercel + Netlify
2.3 🎯 本地部署
# 克隆项目
git clone https://github.com/liu-ziting/what-to-eat.git
cd what-to-eat
# 安装依赖
npm install
# 配置环境变量
cp .env.example .env
# 编辑 .env 文件,添加你的 AI API 密钥
# 启动开发服务器
npm run dev
# 🎯 首次启动后,点击导航栏的 ⚙️ 图标可以动态配置AI模型参数
本地部署需要添加自己的AI的API秘钥,官网提供了可视化服务,我们可以直接使用。
03 一睹为快

在首页,我们分别可以看到主页、美食盲盒、满汉全席、玄学厨房、酱料大师,以及更多。
3.1 生成菜谱
主要分三步:
- ① 选择食材
- ② 选择菜系
- ③ 交给大师
小编这里随便选了三个食材:牛排、鹅肉、油菜
3.2 成品展示
成品包括了详细的制作步骤、烹饪技巧、营养分析、酒水搭配以及最终的效果。
3.3 美食盲盒

生成随机的食材,也可以通过偏好设置限制食材的范围。

然后就可以通过上面的步骤生成美食食谱了。
3.4 其他
还有满汉全席、玄学厨房、酱料大师使用方法大同小异。通过引入其他的东西来限制食材以及菜系,最后生成不同的结果。
04 技术实现
技术当然绕不来大模型AI,选择合适的大模型,配合合理的提示词,生成稳定的模板。
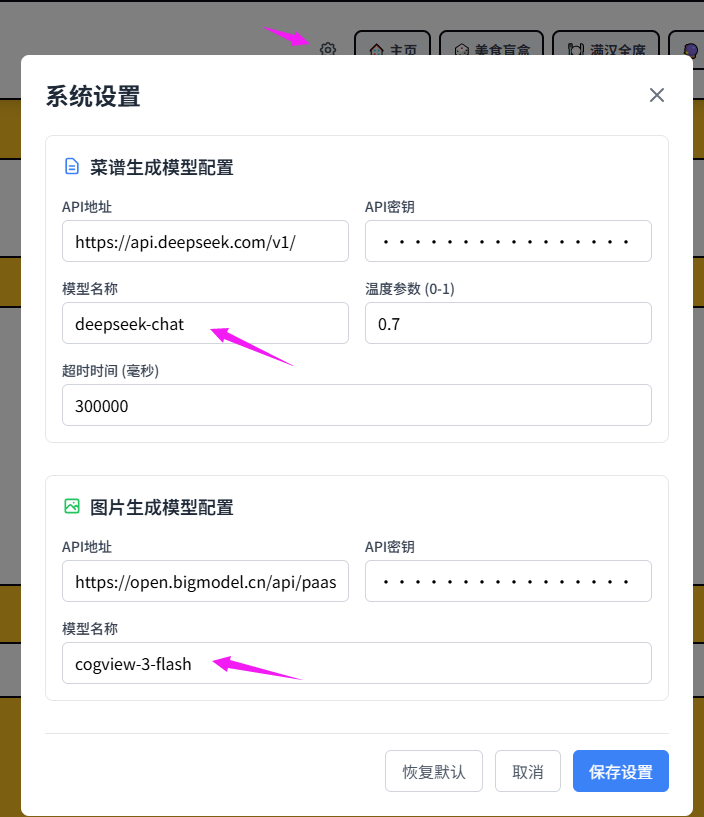
我们可以看到菜谱默认使用的是deepseek-chat,而文生图使用的是cogview-3-flash。可以在这里配置适合自己的大模型。作者也是做到了可配置化。
调用大模型并不难,难就难在提示词,通过合理的提示词才能生成符合要求的结果。
05 小结
liu-ziting/what-to-eat 或许不是一个技术上天翻地覆的项目,但它完美地体现了编程的初衷:用技术改善生活,哪怕只是解决一个微小的烦恼。这也算大模型AI的一个完美落地。


















 286
286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











