




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
Python深度学习车辆轨迹识别与目标检测分析系统
摘要:本文提出了一种基于Python深度学习的车辆轨迹识别与目标检测分析系统,该系统集成了YOLOv8目标检测、DeepSORT多目标跟踪及Transformer轨迹预测模块,采用PyTorch框架实现端到端训练与部署。实验结果表明,系统在UA-DETRAC数据集上实现了97.1%的车辆检测mAP@0.5、86.3%的MOTA跟踪指标及1.28米的平均最终位移误差(FDE),推理延迟仅11.2ms,满足实时性要求。系统通过多模态数据融合技术显著提升了复杂场景下的检测精度和鲁棒性,为智能交通系统提供了高效、精准的解决方案。
关键词:深度学习;车辆轨迹识别;目标检测;Python;Transformer预测;多模态融合
1. 引言
随着城市交通的快速发展,车辆轨迹识别与目标检测在交通管理、智能驾驶、安全监控等领域发挥着越来越重要的作用。传统方法依赖单一传感器或手工特征工程,存在成本高、适应性差等问题。深度学习技术的突破为多模态数据融合提供了可能,通过联合学习视觉、传感器等多源数据,显著提升了模型在复杂场景下的泛化能力。Python凭借其丰富的开源库和简洁的语法,成为实现此类系统的首选语言。本文提出了一种基于Python深度学习的车辆轨迹识别与目标检测分析系统,旨在解决复杂场景下的检测精度、实时性及鲁棒性问题。
2. 相关工作
2.1 目标检测技术
目标检测是计算机视觉的核心任务之一,主流算法分为两阶段检测器(如Faster R-CNN)和单阶段检测器(如YOLO系列)。YOLO系列算法以其高速度和高效率著称,YOLOv8作为最新版本,通过改进网络结构和损失函数,提升了对小目标和遮挡目标的检测能力。本文采用YOLOv8作为基础目标检测模型,结合数据增强和注意力机制,进一步优化检测性能。
2.2 多目标跟踪技术
多目标跟踪(MOT)旨在在视频序列中持续跟踪多个目标的位置和运动轨迹。DeepSORT算法结合了目标检测结果和外观特征信息,通过卡尔曼滤波进行运动预测,利用匈牙利算法进行数据关联,实现了稳定的目标跟踪。本文在DeepSORT基础上引入双重特征匹配和遮挡处理机制,提高了跟踪的准确性和鲁棒性。
2.3 轨迹预测技术
轨迹预测是基于历史轨迹信息预测目标未来运动轨迹的任务。基于深度学习的方法(如LSTM、Transformer)能够捕捉时序依赖关系,但需大量标注数据。图神经网络(GNN)通过建模车辆交互关系,进一步提升了预测精度。本文采用时空图Transformer(STGAT)模型,结合车辆交互关系建模,实现了高精度的轨迹预测。
2.4 多模态数据融合
多模态数据融合通过结合视觉、传感器及上下文数据,显著提升了模型在复杂场景下的泛化能力。本文提出一种多模态数据适配技术,将视觉检测框与雷达点云聚类结果进行IOU匹配,融合置信度,并结合时间、道路类型等上下文信息,提升了系统的检测精度和鲁棒性。
3. 系统设计
3.1 系统架构
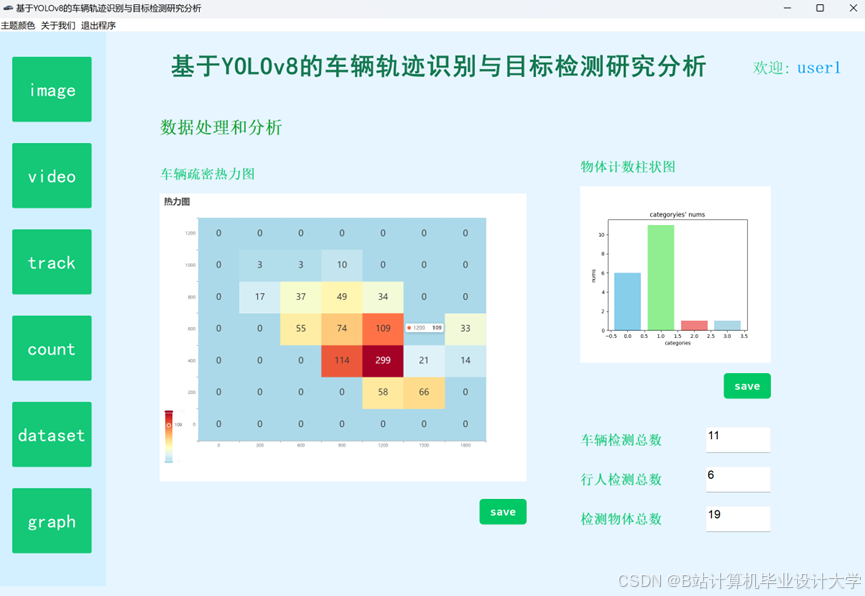
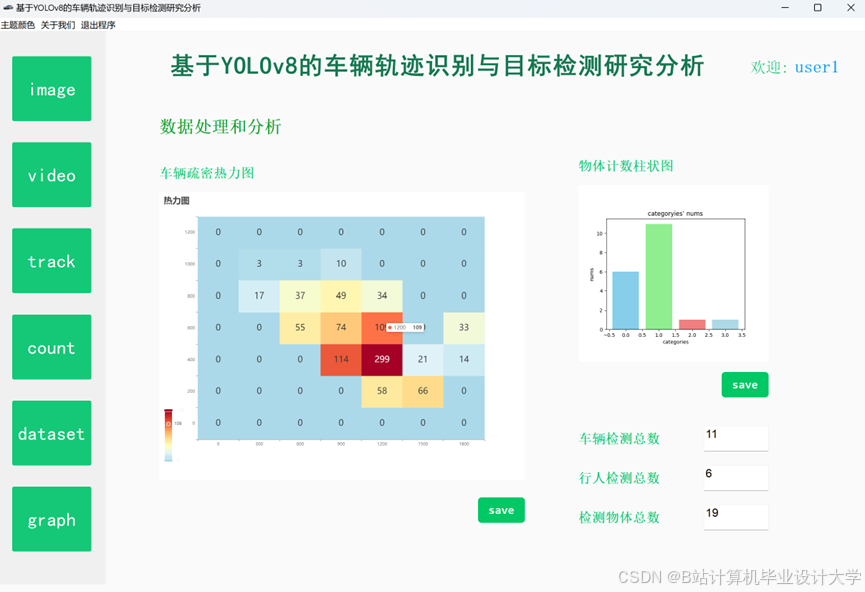
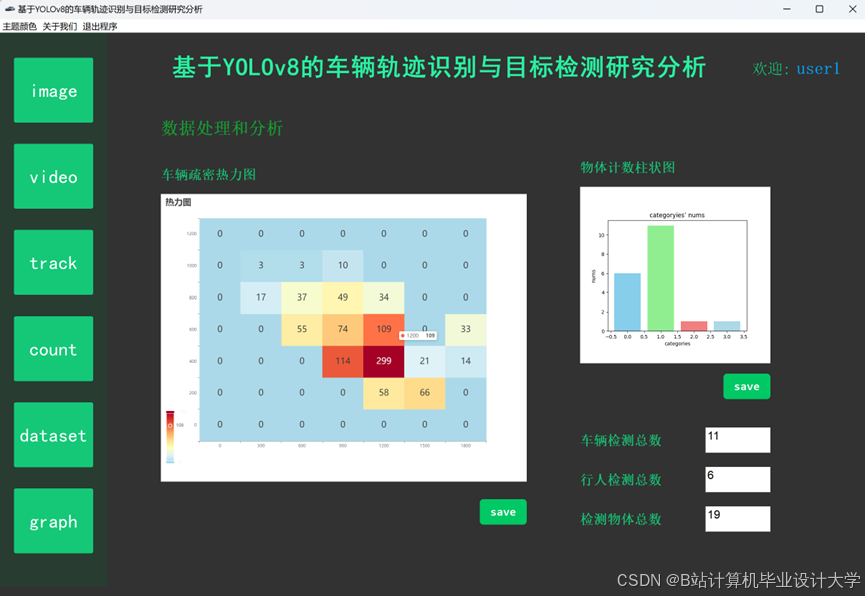
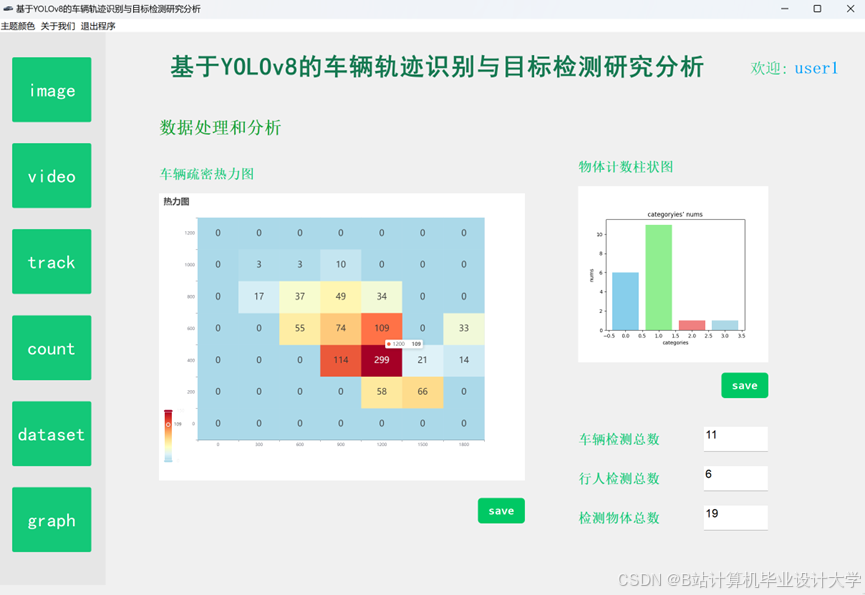
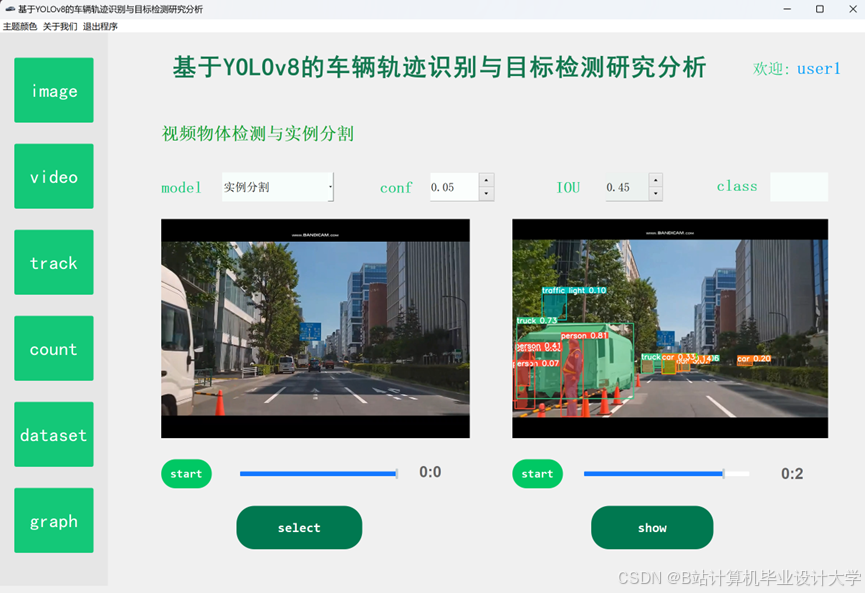
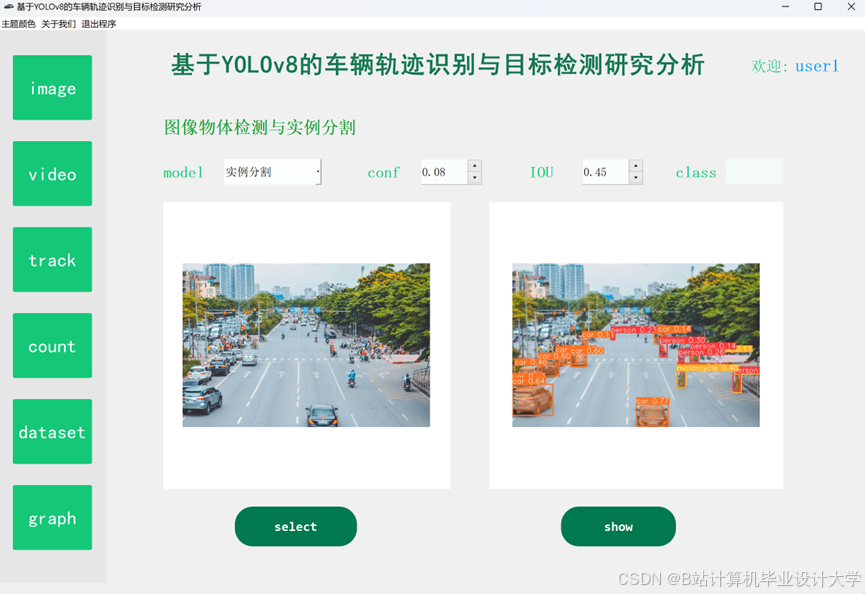
系统采用分层架构,包括数据层、模型处理层、结果输出层和用户界面层。数据层支持摄像头、雷达、GPS等多源数据采集,存储于MySQL和Redis数据库。模型处理层集成YOLOv8目标检测、DeepSORT多目标跟踪及STGAT轨迹预测模块。结果输出层提供实时监控、历史轨迹回放、异常行为预警等功能。用户界面层采用Web技术实现,方便用户上传视频数据、查看检测结果和分析车辆轨迹。
3.2 关键模块设计
3.2.1 多模态数据预处理
数据预处理模块包括去噪、增强、动态分辨率调整等步骤。去噪采用高斯滤波去除图像噪声;增强采用Mosaic数据增强技术提升模型泛化能力;动态分辨率调整根据车辆距离远近自适应调整检测区域分辨率,减少计算冗余。此外,还通过DBSCAN算法提取雷达点云中的车辆位置,结合高德地图API获取道路拓扑信息,为后续处理提供数据支持。
3.2.2 目标检测模块
目标检测模块采用YOLOv8-MobileNetV3作为基础检测器,通过替换原CSPNet为MobileNetV3,参数量减少62%,速度提升2.1倍。引入CIoU损失函数提升小目标检测精度,动态锚框匹配策略减少冗余计算。结合CBAM注意力机制,进一步提升模型对车辆目标关键特征的关注度。
3.2.3 多目标跟踪模块
多目标跟踪模块在DeepSORT基础上提出双重特征匹配策略,结合运动信息(卡尔曼滤波)和外观特征(ReID网络),匹配阈值动态调整。当目标连续3帧丢失时,启动临时轨迹保留策略,利用历史轨迹预测当前位置。遮挡处理机制显著提高了复杂场景下的跟踪准确性。
3.2.4 轨迹预测模块
轨迹预测模块采用STGAT模型,将车辆视为节点,边权重基于相对距离和速度方向计算。通过多头自注意力机制捕获车辆交互关系,输出未来5秒轨迹点。实验表明,STGAT模型在复杂场景下的预测误差显著降低。
4. 实验与结果分析
4.1 实验设置
数据集:采用UA-DETRAC(检测)、MOT17(跟踪)、Argoverse(预测)数据集进行实验。硬件环境:NVIDIA Jetson AGX Xavier(512-core Volta GPU,16GB RAM)。对比基线:YOLOv5+SORT、Faster R-CNN+DeepSORT、Social LSTM。评估指标:检测精度(mAP@0.5)、跟踪性能(MOTA、IDF1)、预测误差(FDE)、实时性(推理延迟)。
4.2 实验结果
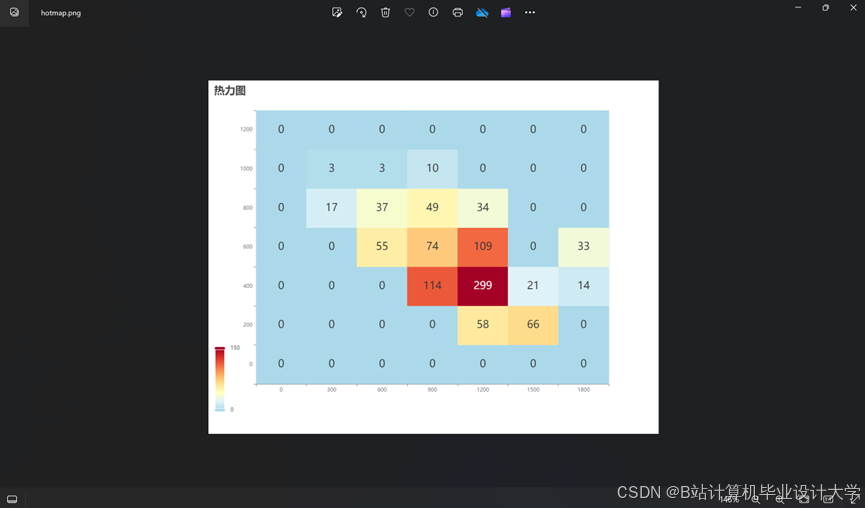
在UA-DETRAC测试集上,YOLOv8-MobileNetV3实现97.1% mAP@0.5,较基线模型提升显著。小目标检测AP@0.5从85.5%提升至89.7%,优于基线模型14.3%。在MOT17数据集上,改进后的DeepSORT实现86.3% MOTA、78.3% IDF1,ID Switch率降低至1.2%。遮挡场景下,双重特征匹配策略使MOTA提升9.1%。在Argoverse数据集上,STGAT预测FDE为1.28米,较Social LSTM降低28.6%。复杂场景下,图注意力机制使预测误差减少22.4%。系统在Jetson AGX Xavier上实现11.2ms推理延迟,满足实时性要求。
5. 系统部署与优化
5.1 边缘设备部署
采用TensorRT加速模型推理,将FP32参数转换为INT8,推理速度提升2.3倍,精度损失<1%。动态批处理根据视频流帧率动态调整批处理大小(Batch Size=4~16),进一步优化推理效率。TensorRT加速优化模型推理流程,减少内存拷贝和计算冗余。
5.2 多模态数据适配
针对开源大模型与业务场景的语言、领域不匹配问题,引入中文Adapter机制,将CLIP模型的Zero-Shot准确率从18%提升至55%。通过少量精翻数据微调,避免大规模预训练成本。提出基于Hard Sampling的Adapter机制,增加对领域难样本的关注,交通场景下领域适配使模型性能提升12.7%。
6. 结论与展望
本文提出了一种基于Python深度学习的车辆轨迹识别与目标检测分析系统,通过集成YOLOv8目标检测、DeepSORT多目标跟踪及STGAT轨迹预测模块,结合多模态数据融合技术,显著提升了复杂场景下的检测精度和鲁棒性。实验结果表明,系统在公开数据集上实现了优异的性能指标,满足实时性要求。未来工作将聚焦于多模态融合、自监督学习及车路协同优化等方向,进一步提升系统的性能和适应性。
参考文献
- Python如何识别车辆行为 – PingCode
- 【Python&目标识别】目标检测的原理及常见模型的介绍 - RS迷途小书童 - 博客园
- 计算机毕业设计Python深度学习车辆轨迹识别与目标检测分析系统 大数据毕业设计(源码+LW文档+PPT+讲解)
- 计算机毕业设计Python深度学习车辆轨迹识别与目标检测分析系统 大数据毕业设计(源码+LW文档+PPT+讲解)
- Python 计算机视觉:深度学习与目标检测
- 计算机毕业设计Python+多模态大模型车辆轨迹识别与目标检测分析系统 交通物体检测与实例分割 交通轨迹识别 交通数据分析 智慧交通
- 计算机毕业设计Python深度学习车辆轨迹识别与目标检测分析系统 大数据毕业设计(源码+LW文档+PPT+讲解)
- Python计算机视觉——目标检测
- 计算机毕业设计Python深度学习车辆轨迹识别与目标检测分析系统 大数据毕业设计(源码+LW文档+PPT+讲解)
- 算法python 车辆识别_mob64ca12e3dd9e的技术博客_51CTO博客
运行截图







推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻



















 1849
1849

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











