




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
《Python深度学习车辆轨迹识别与目标检测分析系统》开题报告
一、选题背景与意义
(一)选题背景
随着城市交通的日益繁忙,车辆轨迹识别与目标检测在交通管理、智能驾驶、安全监控等领域发挥着越来越重要的作用。在交通管理中,准确识别车辆轨迹和检测车辆目标可以帮助交警部门实时掌握交通流量,优化交通信号灯控制,缓解交通拥堵;在智能驾驶领域,车辆轨迹识别与目标检测是自动驾驶汽车实现环境感知、路径规划和决策控制的关键技术之一;在安全监控方面,通过车辆轨迹识别和目标检测可以及时发现异常交通行为,如违规变道、超速行驶等,保障交通安全。
近年来,深度学习技术在计算机视觉领域取得了突破性进展,为车辆轨迹识别与目标检测提供了新的解决方案。深度学习算法能够自动从大量图像和视频数据中学习特征,具有更高的准确性和鲁棒性。Python 作为一种功能强大且易于使用的编程语言,拥有丰富的深度学习库(如 TensorFlow、PyTorch 等),为开发车辆轨迹识别与目标检测分析系统提供了便利。
(二)选题意义
- 提高交通管理效率:通过实时识别车辆轨迹和检测车辆目标,交通管理部门可以更准确地掌握交通状况,制定科学合理的交通管理策略,提高道路通行能力。
- 推动智能驾驶发展:为自动驾驶汽车提供可靠的环境感知能力,帮助其准确识别周围车辆的位置和运动轨迹,实现安全、高效的自动驾驶。
- 增强交通安全保障:及时发现异常交通行为,为交通执法提供依据,减少交通事故的发生,保障人民群众的生命财产安全。
- 促进相关技术发展:本课题的研究将推动深度学习技术在交通领域的应用,为相关领域的研究提供参考和借鉴。
二、国内外研究现状
(一)国外研究现状
国外在车辆轨迹识别与目标检测领域的研究起步较早,取得了显著的成果。一些研究机构和企业利用深度学习算法,如卷积神经网络(CNN)、循环神经网络(RNN)及其变体(如 LSTM、GRU),对车辆图像和视频数据进行分析。例如,谷歌旗下的 Waymo 公司利用深度学习技术实现了高精度的车辆检测和轨迹预测,为自动驾驶汽车的发展提供了有力支持。此外,国外在数据集的构建和共享方面也较为成熟,如 KITTI 数据集,为车辆轨迹识别与目标检测的研究提供了丰富的数据资源。
(二)国内研究现状
国内对车辆轨迹识别与目标检测的研究也日益增多,许多高校和科研机构开展了相关的研究工作。国内学者在借鉴国外先进技术的基础上,结合国内交通特点进行了创新。例如,一些研究利用改进的深度学习算法提高了车辆检测的准确性和实时性;还有一些研究将车辆轨迹识别与目标检测技术应用于智能交通系统中,取得了良好的效果。然而,与国外相比,国内在数据集的质量和规模、算法的创新性以及系统的实际应用方面还存在一定的差距。
(三)研究现状总结
总体而言,国内外在车辆轨迹识别与目标检测领域都取得了一定的进展,但基于 Python 深度学习的车辆轨迹识别与目标检测分析系统的研究还存在一些不足。例如,部分系统在复杂交通场景下的识别准确性和鲁棒性有待提高;系统的实时性和可扩展性也需要进一步优化。本研究将充分发挥 Python 深度学习库的优势,构建一个高效、准确的车辆轨迹识别与目标检测分析系统,为交通领域的发展提供有力支持。
三、研究目标与内容
(一)研究目标
- 构建基于 Python 深度学习的车辆轨迹识别与目标检测模型:利用深度学习算法,如 CNN 和 RNN 及其变体,对车辆图像和视频数据进行特征提取和分类,实现车辆目标的准确检测和轨迹识别。
- 开发车辆轨迹识别与目标检测分析系统:使用 Python 开发一个可视化的系统界面,方便用户上传视频数据、查看检测结果和分析车辆轨迹。系统应具备实时处理能力,能够对输入的视频进行快速分析和处理。
- 评估与优化系统性能:对构建的车辆轨迹识别与目标检测模型和系统进行性能评估,根据评估结果对系统进行优化,提高检测准确性和系统运行效率。
(二)研究内容
- 数据收集与预处理
- 数据收集:从公开数据集(如 KITTI、BDD100K 等)和实际交通监控视频中收集车辆图像和视频数据。数据应涵盖不同的交通场景、天气条件和车辆类型,以提高模型的泛化能力。
- 数据标注:对收集到的数据进行标注,标记出车辆的位置、类别和轨迹信息。可以使用专业的标注工具,如 LabelImg、VGG Image Annotator(VIA)等。
- 数据增强:为了增加数据的多样性,提高模型的鲁棒性,对标注后的数据进行数据增强处理,如旋转、缩放、平移、翻转等。
- 车辆目标检测模型构建
- 模型选择:选择合适的深度学习目标检测算法,如 Faster R - CNN、YOLO 系列(YOLOv3、YOLOv4、YOLOv5 等)、SSD 等。分析不同算法的优缺点,根据项目需求选择最适合的算法。
- 模型训练与优化:使用 Python 的深度学习库(如 TensorFlow、PyTorch)搭建目标检测模型,并利用收集和预处理后的数据进行训练。通过调整模型的超参数(如学习率、批次大小、迭代次数等)、使用数据增强技术和正则化方法(如 Dropout、L2 正则化)优化模型性能,提高车辆检测的准确性和召回率。
- 车辆轨迹识别模型构建
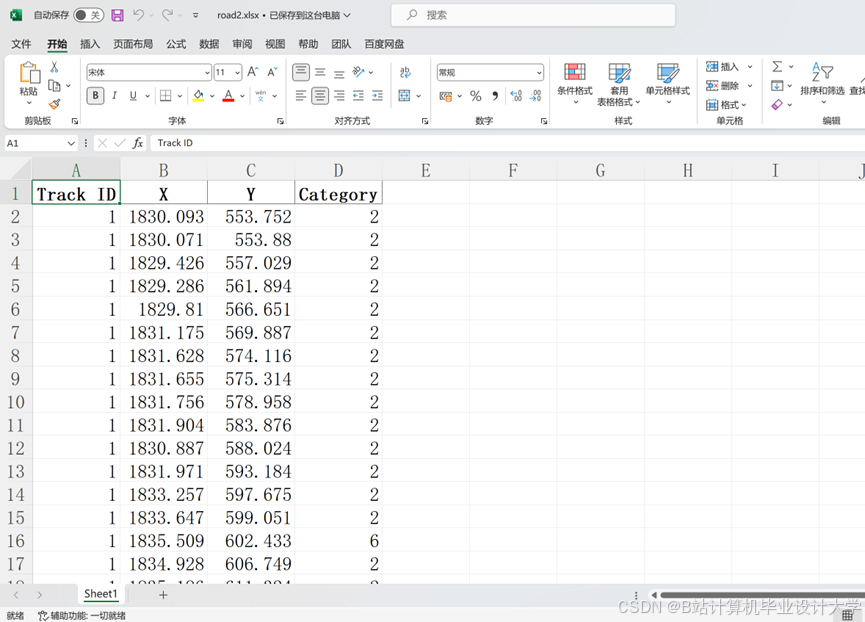
- 轨迹表示方法:研究车辆轨迹的表示方法,如基于坐标的轨迹表示、基于特征的轨迹表示等。选择合适的轨迹表示方法,以便后续的轨迹识别和分析。
- 轨迹识别算法:利用循环神经网络(RNN)及其变体(如 LSTM、GRU)对车辆轨迹进行建模和识别。通过学习车辆轨迹的历史信息,预测车辆未来的运动轨迹。同时,结合目标检测模型的结果,将检测到的车辆目标与轨迹进行关联,实现车辆轨迹的准确识别。
- 车辆轨迹识别与目标检测分析系统开发
- 系统架构设计:设计系统的整体架构,包括数据输入层、模型处理层、结果输出层和用户界面层。使用前后端分离的开发模式,前端采用 Web 技术(如 HTML、CSS、JavaScript 和 Vue.js 框架)实现用户界面,后端使用 Python 的 Flask 或 Django 框架搭建服务器,与深度学习模型进行交互。
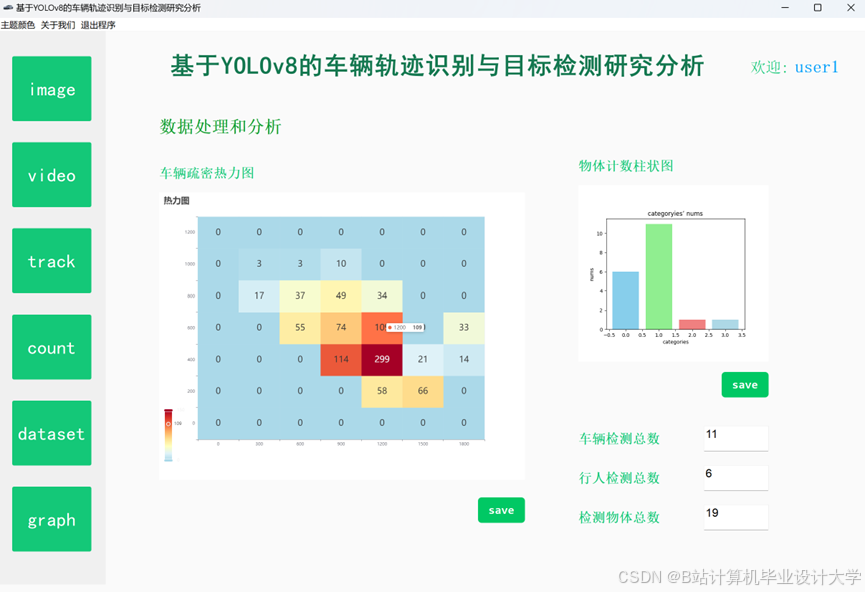
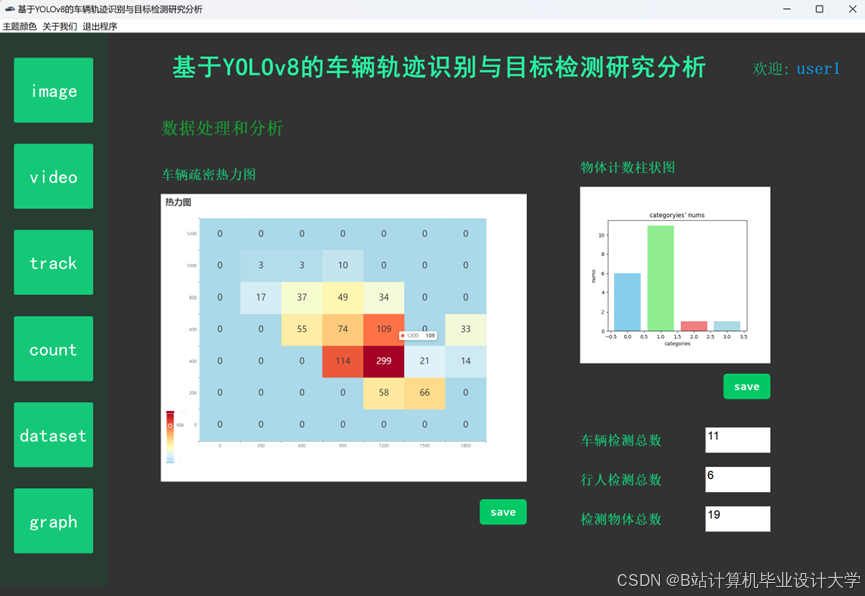
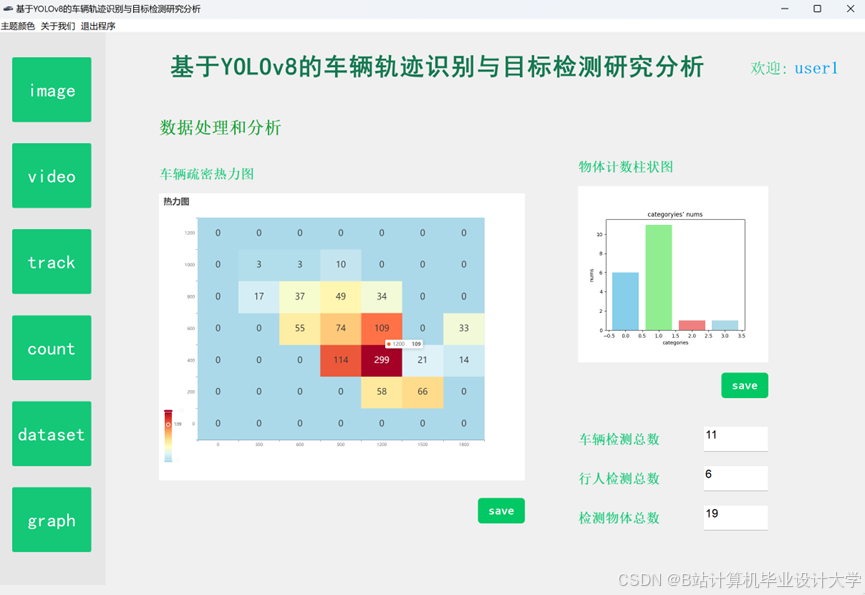
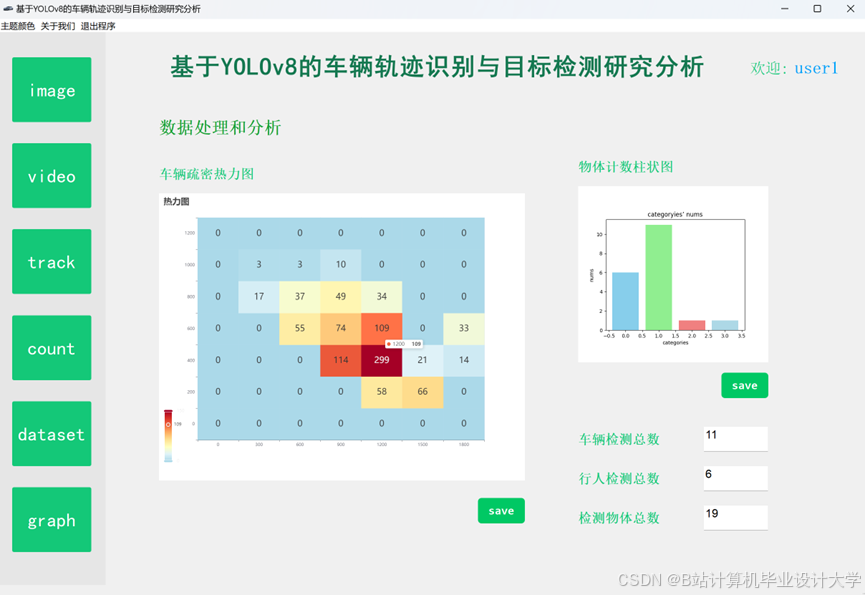
- 功能模块实现:实现系统的各项功能,包括视频上传、车辆目标检测、轨迹识别、结果展示和数据分析等。用户可以通过系统界面上传交通监控视频,系统调用训练好的模型进行检测和分析,并将结果显示给用户。同时,系统提供数据可视化功能,展示车辆轨迹、检测结果统计等信息,方便用户进行分析和决策。
- 系统评估与优化
- 评估指标确定:确定评估车辆轨迹识别与目标检测系统性能的指标,如检测准确率、召回率、F1 值、轨迹识别误差等。
- 实验设计与评估:设计实验,使用测试数据集对系统进行性能评估。对比不同模型和系统配置下的检测结果,分析系统的优势和不足。
- 系统优化:根据评估结果对系统进行优化,如改进模型结构、调整算法参数、优化系统架构等,提高系统的检测准确性和运行效率。
四、研究方法与技术路线
(一)研究方法
- 文献研究法:查阅国内外相关的文献资料,了解车辆轨迹识别与目标检测领域的研究现状和发展趋势,特别是基于 Python 深度学习的研究方法和技术,为课题的研究提供理论支持。
- 实验研究法:通过实验对比不同的深度学习算法、模型结构和参数设置,选择最适合本课题的技术方案。在实际数据上进行系统测试,验证系统的性能和有效性。
- 系统开发法:采用 Python 编程语言和相关的深度学习库进行系统的开发和实践,将目标检测和轨迹识别功能集成到系统中,实现系统的各项功能。
(二)技术路线
- 环境搭建
- 安装 Python 开发环境,配置相关的深度学习库(如 TensorFlow、PyTorch)和数据处理库(如 OpenCV、Pandas、NumPy)。
- 搭建 Web 开发环境,安装前端开发工具和后端服务器框架。
- 数据收集与预处理
- 使用爬虫技术或从公开数据集获取车辆图像和视频数据。
- 使用标注工具对数据进行标注,并利用数据增强技术增加数据的多样性。
- 模型构建与训练
- 使用 Python 的深度学习库搭建目标检测和轨迹识别模型。
- 对模型进行训练和优化,调整超参数以提高模型性能。
- 系统开发
- 使用前端技术实现用户界面,使用后端框架搭建服务器,实现与深度学习模型的交互。
- 开发系统的各个功能模块,如视频上传、检测分析、结果展示等。
- 系统评估与优化
- 设计实验方案,对系统进行性能评估。
- 根据评估结果对系统进行优化,如调整算法参数、优化系统架构等。
五、预期成果与创新点
(一)预期成果
- 完成基于 Python 深度学习的车辆目标检测和轨迹识别模型的构建,在测试数据集上达到较高的检测准确性和轨迹识别精度。
- 开发一个功能完善的车辆轨迹识别与目标检测分析系统,提供用户友好的界面和便捷的操作方式,能够实时处理交通监控视频并展示检测结果和分析信息。
- 撰写相关学术论文 1 - 2 篇,阐述课题的研究思路、技术实现和实验结果;申请软件著作权 1 项,对开发的车辆轨迹识别与目标检测分析系统进行知识产权保护。
(二)创新点
- 多算法融合的检测与识别模型:将不同的目标检测算法和轨迹识别算法进行融合,充分发挥各算法的优势,提高车辆检测和轨迹识别的准确性和鲁棒性。例如,结合 Faster R - CNN 的高精度检测能力和 LSTM 的轨迹预测能力,实现更准确的车辆轨迹识别。
- 实时处理与动态优化:系统具备实时处理能力,能够对输入的交通监控视频进行快速分析和处理。同时,设计动态优化机制,根据实时检测结果和交通场景的变化,自动调整模型参数和算法策略,提高系统的适应性和性能。
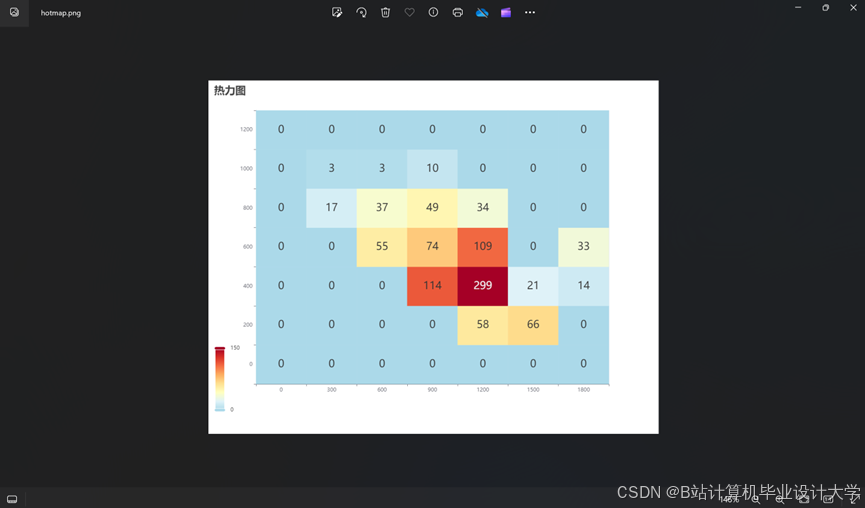
- 可视化交互与深度分析:在系统中集成可视化交互功能,以直观的图表和报表形式展示车辆轨迹、检测结果统计等信息。同时,提供深度分析功能,如交通流量统计、异常行为检测等,为用户提供更全面的交通信息。
- 轻量化模型与部署优化:针对实际应用场景,对深度学习模型进行轻量化处理,减少模型的计算量和存储空间,提高系统的运行效率。同时,优化系统的部署方式,使其能够在不同的硬件平台上稳定运行,如嵌入式设备、服务器等。
六、研究计划与进度安排
(一)研究计划
- 第 1 - 2 个月:完成项目调研,了解车辆轨迹识别与目标检测和 Python 深度学习的相关研究现状,确定技术路线和系统架构。组建项目团队,明确各成员的职责和分工。
- 第 3 - 4 个月:搭建开发环境,进行数据收集和预处理工作,构建初步的数据集。
- 第 5 - 6 个月:开展车辆目标检测模型的研究和构建工作,选择合适的算法和模型,进行模型训练和优化。
- 第 7 - 8 个月:进行车辆轨迹识别模型的研究和构建工作,结合目标检测模型的结果,实现车辆轨迹的准确识别。
- 第 9 - 10 个月:进行车辆轨迹识别与目标检测分析系统的开发,包括系统架构设计、用户界面开发和系统集成等工作。
- 第 11 - 12 个月:对系统进行测试和评估,收集用户反馈,对系统进行改进和完善。撰写项目报告和相关文档,准备毕业答辩。
(二)进度安排
| 时间段 | 研究内容 |
|---|---|
| 第1 - 2个月 | 项目启动与需求分析 |
| 第3 - 4个月 | 环境搭建与数据采集预处理 |
| 第5 - 6个月 | 车辆目标检测模型构建 |
| 第7 - 8个月 | 车辆轨迹识别模型构建 |
| 第9 - 10个月 | 车辆轨迹识别与目标检测分析系统开发 |
| 第11 - 12个月 | 系统测试与优化、项目收尾 |
七、参考文献
[以下列出在开题报告中引用的相关学术文献、研究报告、技术文档等,具体格式按照学校要求的参考文献格式进行书写。例如:]
[1] [作者姓名]. [书名].[出版社名称], [出版年份].
[2] [作者姓名]. [论文题目].[期刊名称], [发表年份],卷号: [起止页码].
[3] [网站名称]. [文章标题].[发布时间]. [访问时间]. [URL].
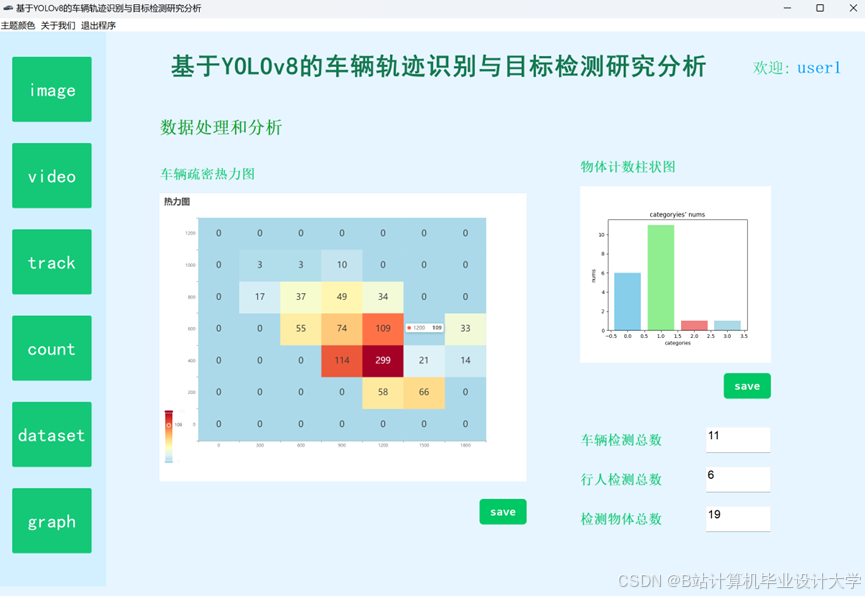
运行截图







推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻


















 3462
3462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











