




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
以下是一篇关于《Python深度学习车辆轨迹识别与目标检测分析系统》的开题报告框架及内容示例,供参考:
开题报告
题目:Python深度学习车辆轨迹识别与目标检测分析系统
学院/专业:计算机科学与技术/人工智能方向
学生姓名:XXX
指导教师:XXX
日期:XXXX年XX月XX日
一、研究背景与意义
-
研究背景
随着智能交通系统(ITS)的快速发展,车辆轨迹识别与目标检测成为城市交通管理、自动驾驶、安全监控等领域的核心技术。传统方法(如基于传感器或手工特征提取)存在精度低、适应性差等问题,而深度学习通过端到端的学习能力,显著提升了复杂场景下的目标检测与轨迹预测性能。
Python因其丰富的开源库(如TensorFlow、PyTorch、OpenCV)和简洁的语法,成为深度学习开发的首选语言。本研究旨在利用Python构建一套基于深度学习的车辆轨迹识别与目标检测系统,实现高效、精准的交通数据分析。 -
研究意义
- 理论意义:探索深度学习在动态场景目标检测与轨迹预测中的应用,优化模型结构与算法效率。
- 实践意义:为智能交通监控、自动驾驶决策、交通流量分析等提供技术支撑,提升城市交通智能化水平。
二、国内外研究现状
- 目标检测技术
- 传统方法:HOG+SVM、DPM等,依赖手工特征,对复杂场景适应性差。
- 深度学习方法:基于卷积神经网络(CNN)的R-CNN系列、YOLO系列、SSD等,实现实时高精度检测。
- 轨迹预测技术
- 基于滤波的方法(如卡尔曼滤波):适用于线性系统,非线性场景下精度不足。
- 基于深度学习的方法(如LSTM、Transformer):通过时序建模捕捉车辆运动规律,提升预测准确性。
- 现有问题
- 多目标遮挡、光照变化、复杂背景下的检测鲁棒性不足。
- 轨迹预测中长时依赖建模能力有限,实时性需优化。
三、研究内容与技术路线
- 研究内容
- 目标检测模块:基于YOLOv8或Faster R-CNN实现车辆实时检测,优化模型轻量化设计。
- 轨迹跟踪模块:结合DeepSORT算法实现多目标跟踪,解决ID切换问题。
- 轨迹预测模块:构建LSTM或Transformer时序模型,预测车辆未来位置。
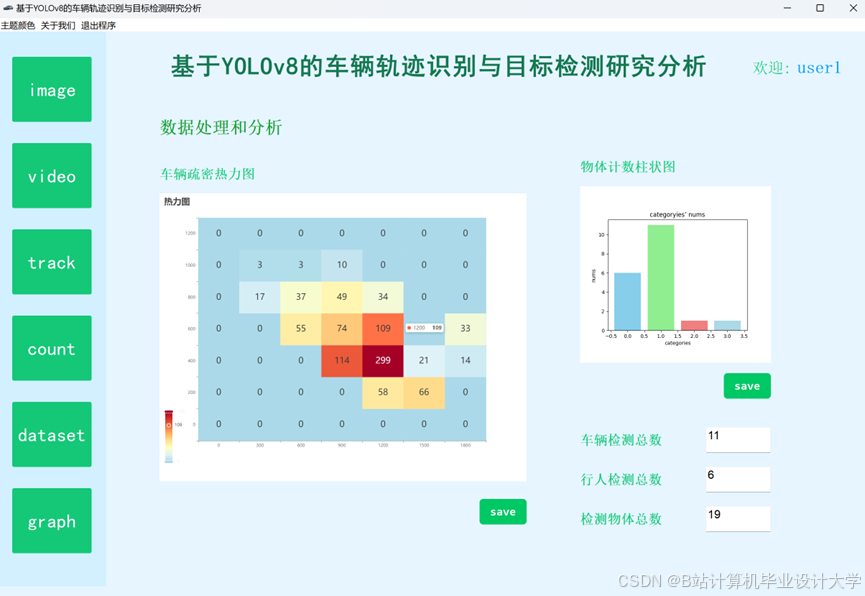
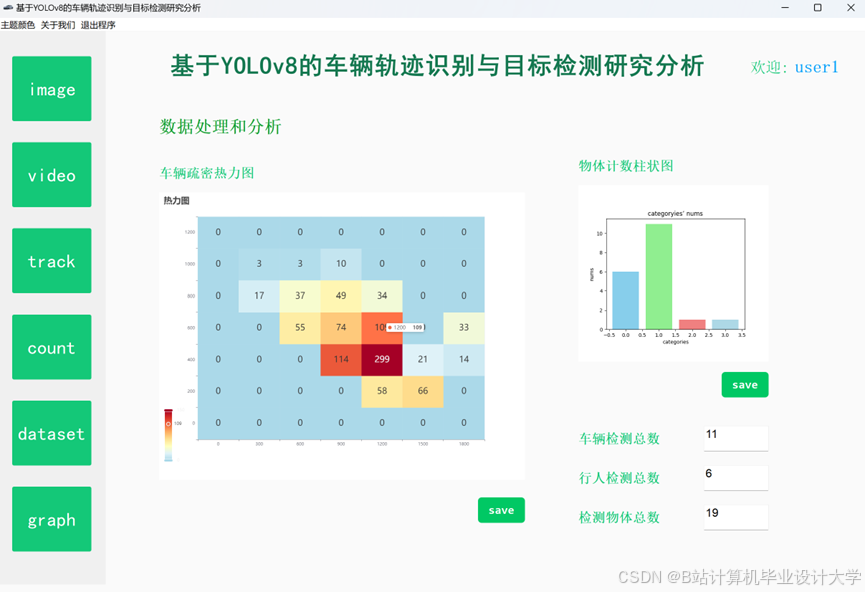
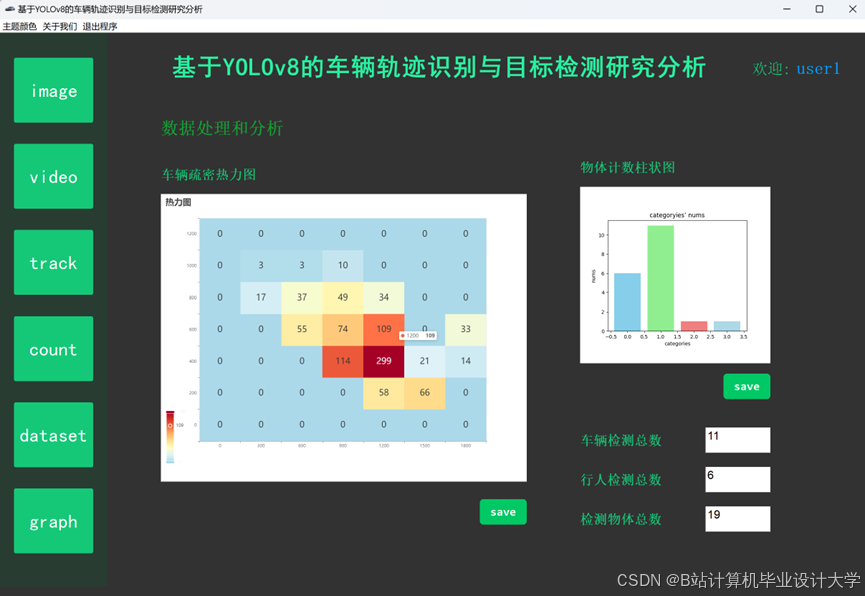
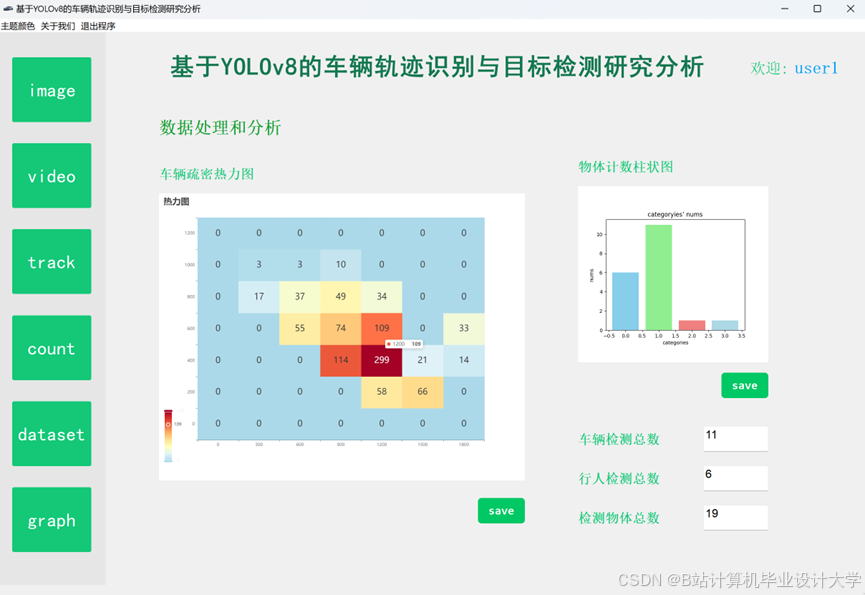
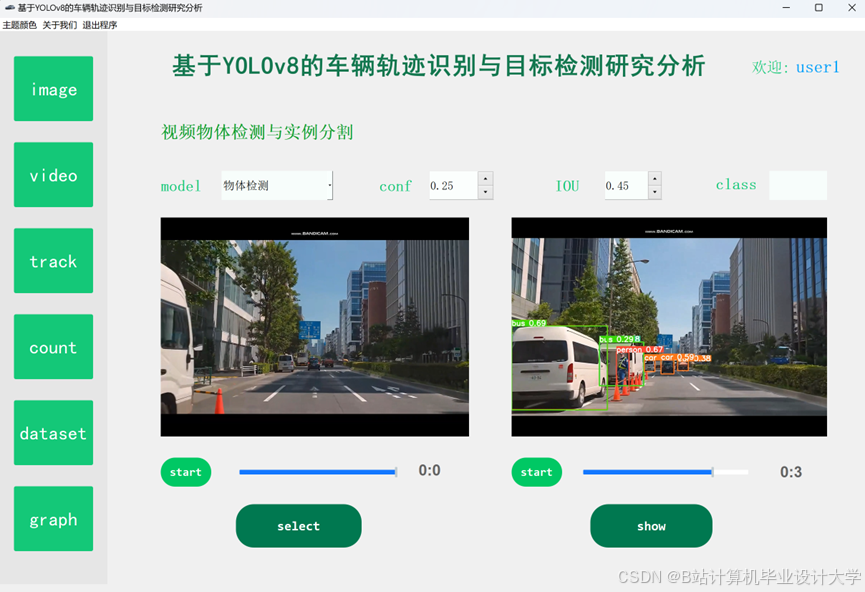
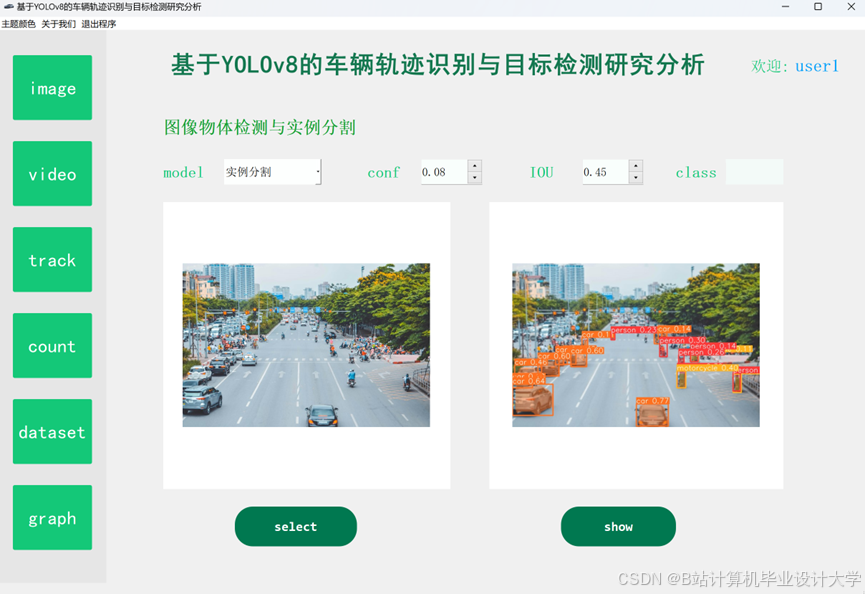
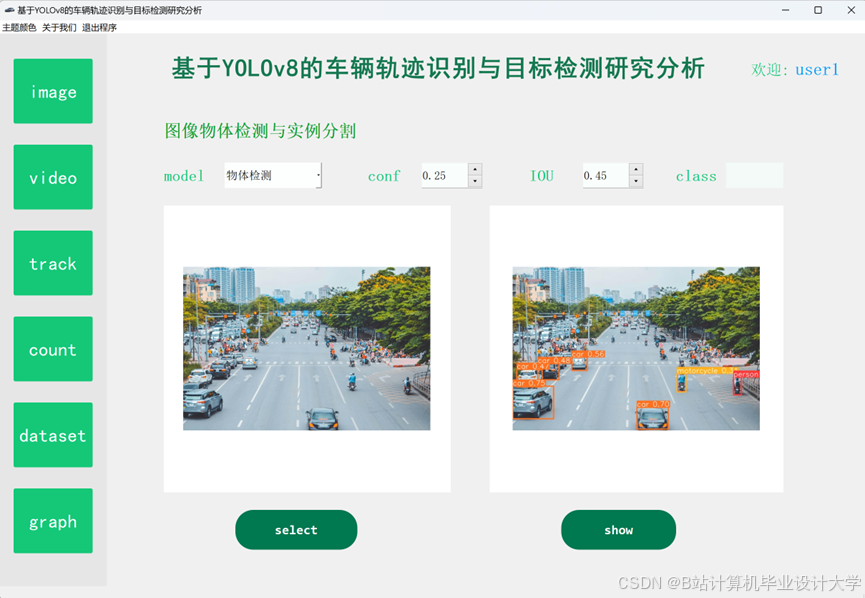
- 系统集成与可视化:开发Python GUI界面,实时展示检测结果与轨迹分析。
- 技术路线
1数据采集(公开数据集/自建数据集)
2↓
3数据预处理(标注、增强、归一化)
4↓
5模型训练(目标检测→轨迹跟踪→轨迹预测)
6↓
7系统集成(Flask/PyQt可视化)
8↓
9实验验证(对比分析精度、实时性、鲁棒性)四、创新点与预期成果
- 创新点
- 结合轻量化YOLO模型与改进DeepSORT算法,提升复杂场景下的多目标跟踪稳定性。
- 引入注意力机制的Transformer模型,优化长时轨迹预测性能。
- 设计模块化Python系统,支持扩展至其他移动目标(如行人、无人机)。
- 预期成果
- 完成一套基于Python的车辆轨迹识别与检测系统,检测精度≥90%,FPS≥30。
- 发表1篇核心期刊或国际会议论文,申请1项软件著作权。
- 开放源代码与数据集,供后续研究复现与改进。
五、研究计划与进度安排
| 阶段 | 时间 | 任务 |
|---|---|---|
| 文献调研 | 第1-2周 | 梳理目标检测与轨迹预测算法 |
| 数据准备 | 第3-4周 | 采集数据并完成标注与增强 |
| 模型开发 | 第5-8周 | 训练检测、跟踪、预测模型 |
| 系统集成 | 第9-10周 | 开发可视化界面与功能测试 |
| 论文撰写 | 第11-12周 | 实验分析、论文撰写与答辩准备 |
六、参考文献
[1] Redmon J, Divvala S, Girshick R, et al. You Only Look Once: Unified, Real-Time Object Detection[C]. CVPR 2016.
[2] Wojke N, Bewley A, Paulus D. Simple Online and Realtime Tracking with a Deep Association Metric[C]. ICIP 2017.
[3] Vaswani A, Shazeer N, Parmar N, et al. Attention Is All You Need[J]. NeurIPS 2017.
[4] 李XX. 基于深度学习的车辆轨迹预测方法研究[D]. XX大学, 2022.
指导教师意见:
(待填写)
注意事项:
- 根据实际研究调整技术细节(如模型选择、数据集名称)。
- 需补充具体实验环境(如GPU型号、开发框架版本)。
- 创新点需突出与现有研究的差异性与可行性。
希望这份框架对您有所帮助!
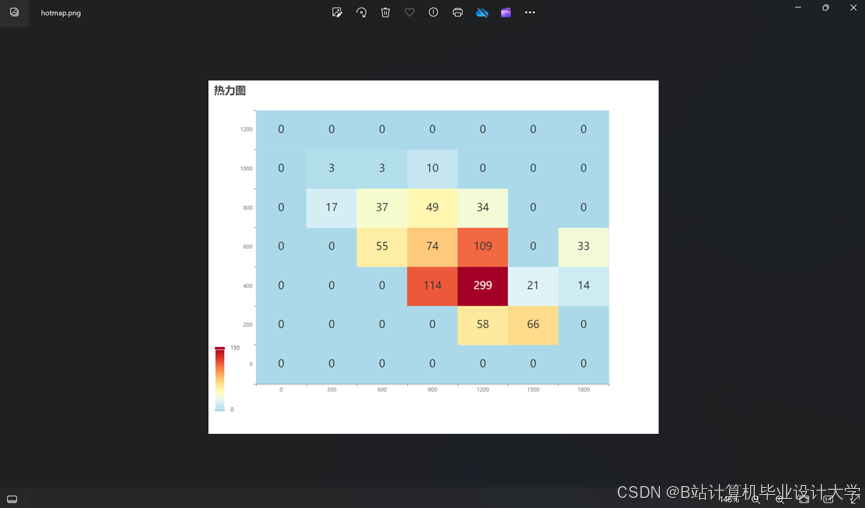
运行截图






推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻



















 1849
1849

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











