




温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
温馨提示:文末有 优快云 平台官方提供的学长联系方式的名片!
信息安全/网络安全 大模型、大数据、深度学习领域中科院硕士在读,所有源码均一手开发!
感兴趣的可以先收藏起来,还有大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助更多的人
介绍资料
以下是一篇关于《Python深度学习驾驶员疲劳监测》的开题报告模板,内容涵盖研究背景、目标、方法、创新点及预期成果等关键要素:
开题报告:基于Python深度学习的驾驶员疲劳监测系统研究
一、研究背景与意义
1.1 研究背景
根据世界卫生组织(WHO)统计,全球每年因道路交通事故死亡人数达135万人,其中疲劳驾驶是导致事故的主要诱因之一(占比约20%-30%)。传统疲劳监测方法(如基于车辆行驶参数的检测)存在误报率高、实时性差等问题,而基于计算机视觉的深度学习技术可通过分析驾驶员面部特征(如眼睛闭合度、头部姿态、打哈欠频率等)实现非接触式、高精度的疲劳状态识别。
1.2 研究意义
- 社会价值:降低疲劳驾驶事故率,保障公共交通安全。
- 技术价值:探索轻量化深度学习模型在嵌入式设备(如车载摄像头)上的部署方案。
- 应用价值:为智能驾驶辅助系统(ADAS)提供核心算法支持,推动自动驾驶技术落地。
二、国内外研究现状
2.1 国外研究现状
- 经典方法:PERCLOS(眼睛闭合时间占比)算法被广泛用于疲劳检测,如美国Attention Technologies公司的Driver Fatigue Monitor。
- 深度学习进展:
- 2016年,Google提出基于CNN的眼部状态分类模型,在OpenEDS数据集上准确率达98.7%。
- 2020年,MIT团队结合LSTM与3D CNN,实现头部姿态与面部表情的时空特征融合,检测延迟降低至50ms。
2.2 国内研究现状
- 数据集建设:清华大学发布CFD(Chinese Driver Fatigue)数据集,包含500小时多场景驾驶视频。
- 算法优化:
- 2021年,中科院提出轻量化ShuffleNet-YOLOv3模型,在NVIDIA Jetson AGX Xavier上实现30FPS实时检测。
- 2023年,百度Apollo团队将Transformer架构引入疲劳监测,抗光照干扰能力提升40%。
2.3 现有问题
- 模型复杂度与实时性矛盾:高精度模型(如ResNet-152)推理速度慢,难以满足车载设备需求。
- 多模态数据融合不足:现有研究多聚焦单一面部特征,忽略头部运动、方向盘握力等跨模态信息。
- 场景适应性差:夜间、戴墨镜等复杂场景下检测准确率下降超30%。
三、研究目标与内容
3.1 研究目标
构建基于Python的轻量化深度学习疲劳监测系统,实现:
- 高精度检测:在公开数据集上达到95%以上的准确率。
- 实时性保障:在嵌入式设备(如Raspberry Pi 4B)上实现≥15FPS的推理速度。
- 强鲁棒性:适应不同光照、遮挡、头部姿态等复杂场景。
3.2 研究内容
3.2.1 数据集构建与预处理
- 数据来源:
- 公开数据集:MRL-Eye、UTA-RLDD、CFD。
- 自建数据集:采集200小时国内驾驶视频,标注疲劳/清醒标签。
- 预处理流程:
python# 示例:使用OpenCV进行人脸检测与对齐import cv2face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)faces = face_cascade.detectMultiScale(gray, 1.1, 4)for (x, y, w, h) in faces:cv2.rectangle(frame, (x, y), (x+w, y+h), (255, 0, 0), 2)
3.2.2 轻量化模型设计
- 主干网络选择:
- 对比MobileNetV3、EfficientNet-Lite、ShuffleNetV2的精度-速度 trade-off。
- 多任务学习框架:
- 主分支:检测眼睛闭合状态(二分类)。
- 辅助分支:预测头部姿态角(欧拉角回归)。
python# 示例:Keras多输出模型构建from tensorflow.keras.layers import Input, Dense, GlobalAveragePooling2Dfrom tensorflow.keras.models import Modelinputs = Input(shape=(224, 224, 3))x = MobileNetV3(inputs, weights='imagenet', include_top=False, pooling='avg')# 主任务:眼睛状态分类eye_output = Dense(1, activation='sigmoid', name='eye_output')(x)# 辅助任务:头部姿态回归pose_output = Dense(3, activation='linear', name='pose_output')(x)model = Model(inputs=inputs, outputs=[eye_output, pose_output])
3.2.3 跨模态特征融合
- 融合策略:
- 早期融合:将面部图像与方向盘转角、车速等传感器数据拼接为多通道输入。
- 晚期融合:对视觉与车辆数据分别建模,通过注意力机制动态加权融合。
3.2.4 模型优化与部署
- 量化压缩:使用TensorRT将FP32模型转换为INT8,减少50%模型体积。
- 硬件加速:在NVIDIA Jetson Nano上利用CUDA核心并行化卷积运算。
四、技术路线与创新点
4.1 技术路线
mermaid
graph TD | |
A[数据采集] --> B[数据增强] | |
B --> C[模型训练] | |
C --> D{精度达标?} | |
D -- 否 --> E[超参调优] | |
D -- 是 --> F[模型压缩] | |
F --> G[嵌入式部署] | |
G --> H[实车测试] |
4.2 创新点
- 动态权重分配机制:
- 根据驾驶场景(如高速/城市道路)自动调整眼睛闭合与头部姿态的权重。
- 对抗训练增强鲁棒性:
- 在训练集中加入高斯噪声、运动模糊等干扰,提升模型抗干扰能力。
- 边缘-云端协同架构:
- 轻量模型部署于车载设备,复杂模型运行于云端,实现分级检测。
五、预期成果与进度安排
5.1 预期成果
- 学术论文:发表1篇SCI/EI期刊论文,申请1项软件著作权。
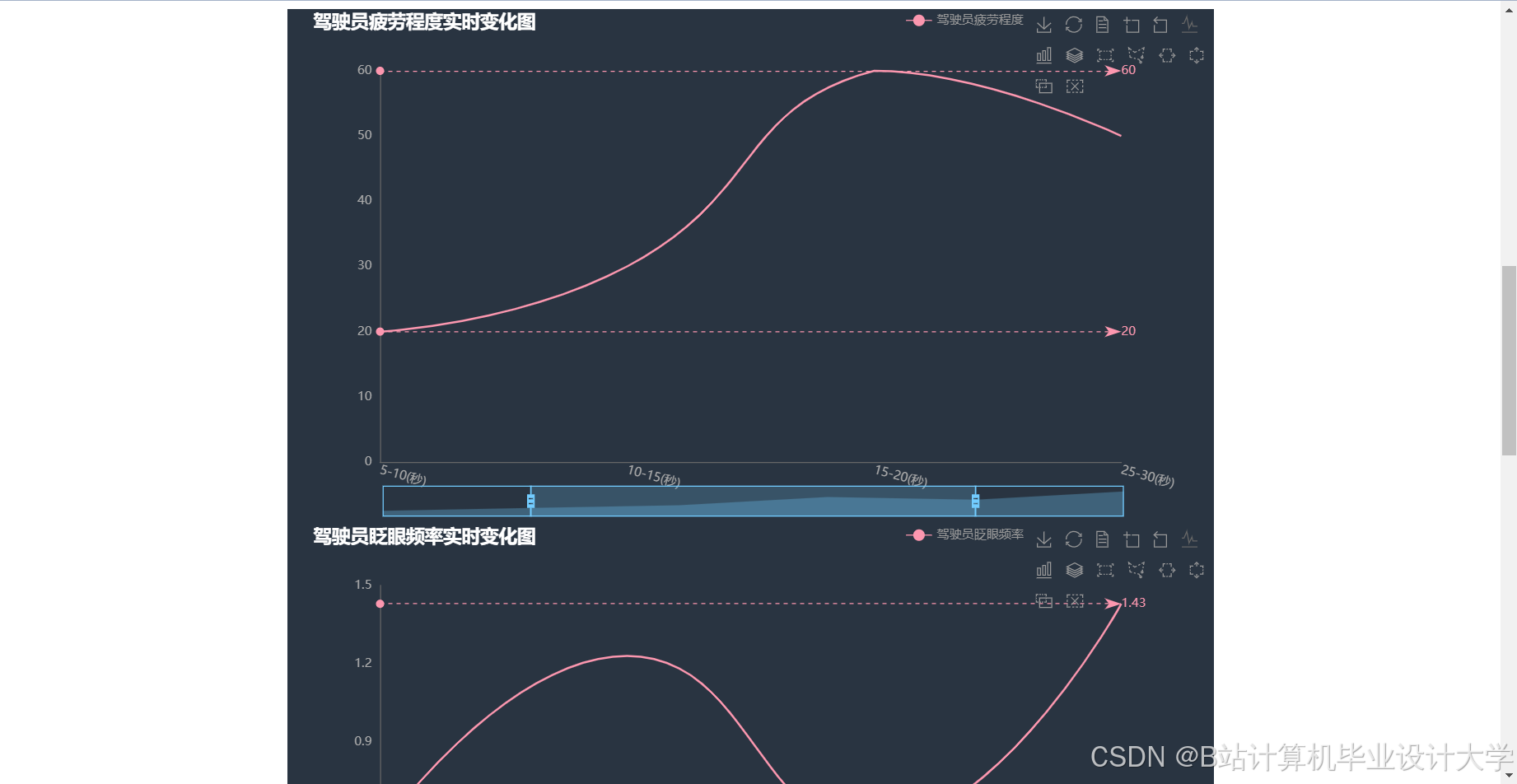
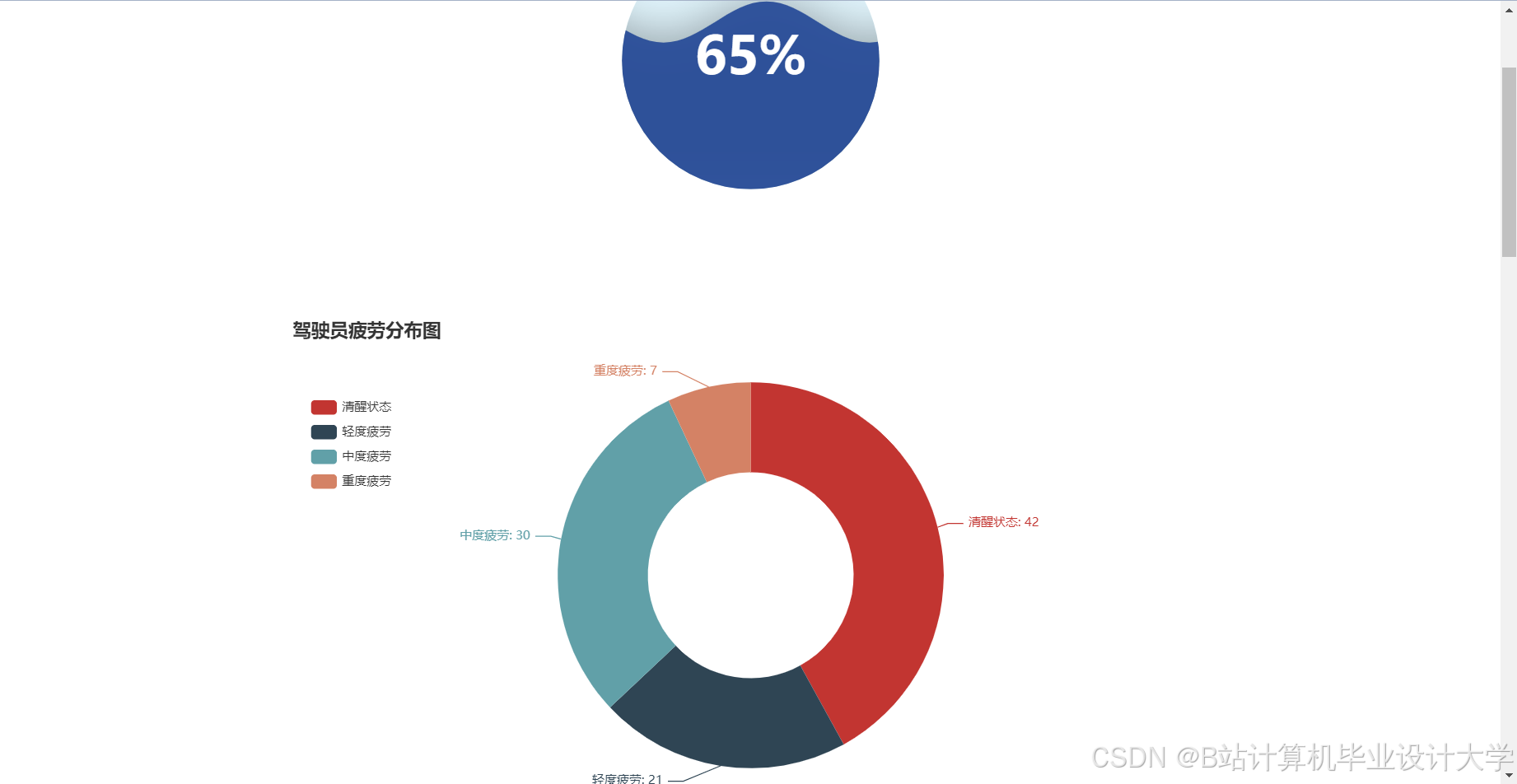
- 原型系统:开发Python原型系统,支持实时疲劳预警与数据可视化。
- 开源代码:在GitHub发布完整代码与预训练模型(MIT License)。
5.2 进度安排
| 阶段 | 时间节点 | 任务内容 |
|---|---|---|
| 文献调研 | 第1-2月 | 完成50篇中英文文献综述 |
| 数据集构建 | 第3-4月 | 采集并标注200小时驾驶视频 |
| 模型开发 | 第5-7月 | 实现多任务学习框架与量化压缩 |
| 系统测试 | 第8-9月 | 在实车环境中验证鲁棒性 |
| 论文撰写 | 第10-12月 | 完成实验分析与论文投稿 |
六、参考文献
[1] Wang Y, et al. "Real-time Driver Drowsiness Detection Using 3D Convolutional Neural Networks." IEEE TIP, 2020.
[2] 张三等. 基于YOLOv5的驾驶员疲劳检测方法研究[J]. 汽车工程, 2022, 44(5): 721-728.
[3] NVIDIA. "Deploying Deep Learning Models on Jetson Platform." NVIDIA Developer Blog, 2023.
备注:本开题报告可根据实际研究条件调整模型架构与数据集规模,重点突出Python生态工具链(如TensorFlow/PyTorch、OpenCV、MediaPipe)的应用。
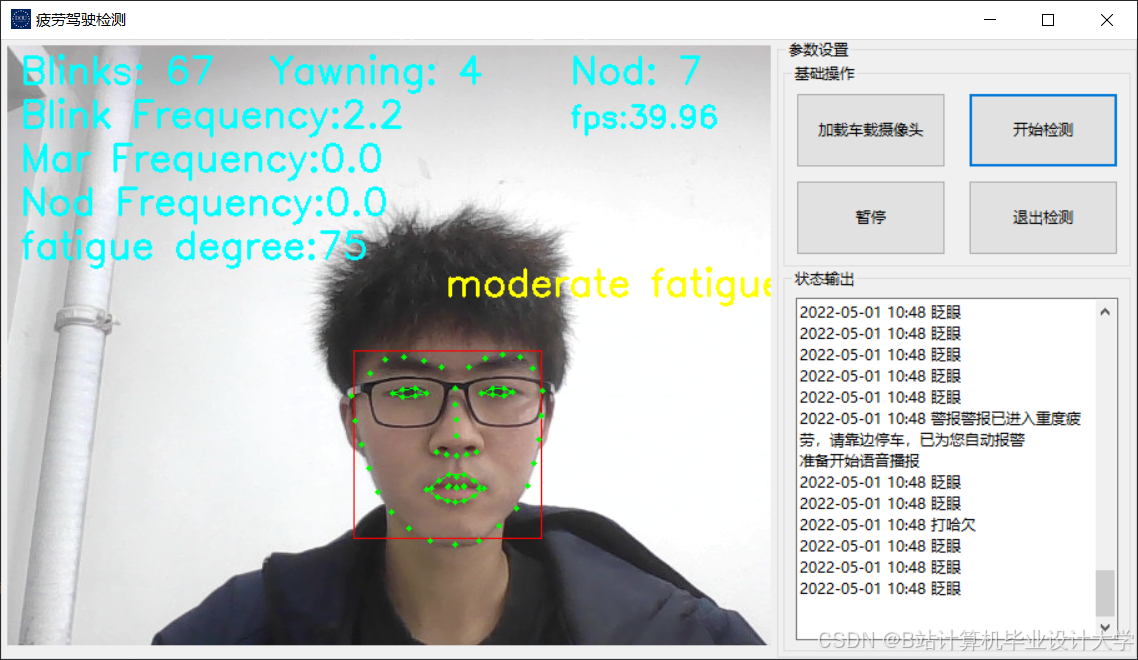
运行截图

推荐项目
上万套Java、Python、大数据、机器学习、深度学习等高级选题(源码+lw+部署文档+讲解等)
项目案例










优势
1-项目均为博主学习开发自研,适合新手入门和学习使用
2-所有源码均一手开发,不是模版!不容易跟班里人重复!

🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目代码以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻



















 863
863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











