



全网最细致题解,哪怕是个规律题,也要讲出自己是如何发现规律的,不然读者很难理解,我翻看了当前的所有c++题解,没有解释的,所以在想明白以后,发了此题解 请在此处填写你的解题思路
#include<iostream>
using namespace std;
int main()
{
int m,n;
cin>>m>>n;
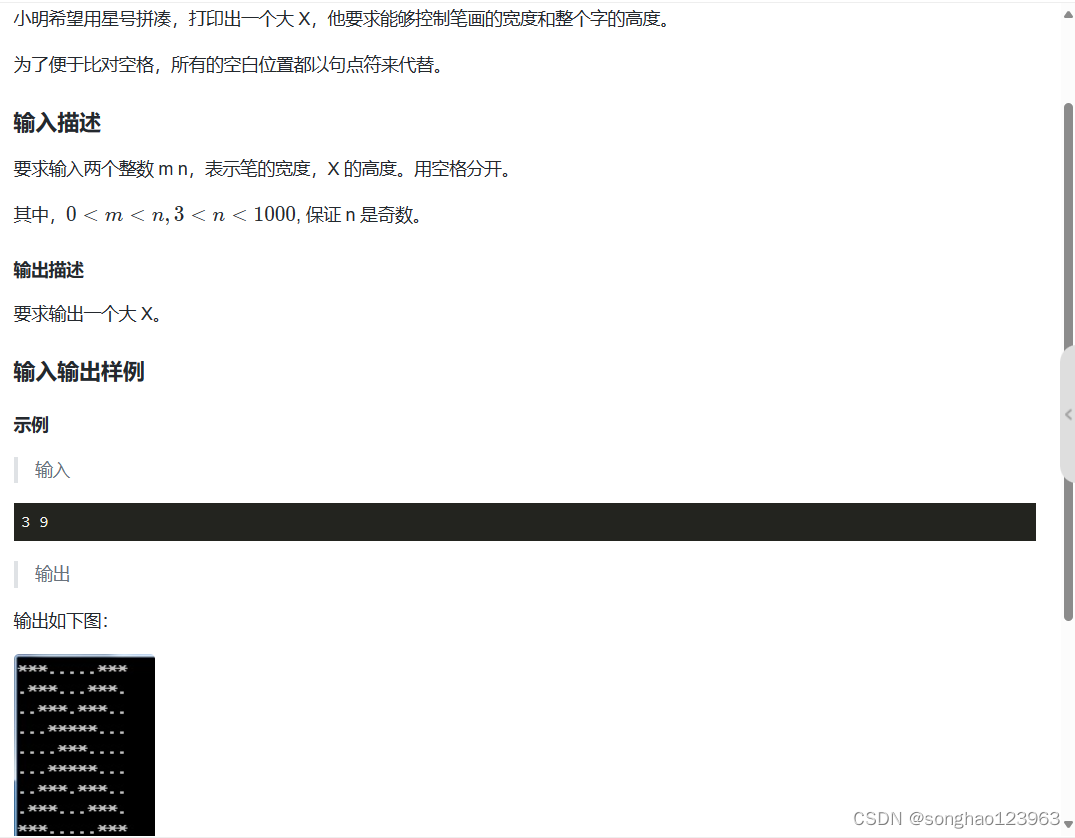
int r=n+m-1;//不难发现每行一共有r个字符,同时作为右边界
//如何发现的这个规律呢,可以看出,无论笔画宽度是几,第一行的第一组*的最后一个恰好在最后一行走到了最右下角,经过了n次变换,然后这个*前还有m-1个*,所以总共一行有n+m-1个字符
int l=1;//左边界
for(int i=1;i<=n;i++)//一共有n行,循环n遍
{
for(int j=1;j<=n+m-1;j++)//一共有n+m-1列,循环这么多遍
{
//判断是否在应该输出*的区间
if((j>=l&&j<=l+m-1)|| (j>=r-m+1&&j<=r)) printf("*");//每一行两组*,第一组,第一个位置在l,第一组的最后一个在l+m-1
//同理,第二组的第一个*在r-m+1,最后一个*在r
else printf(".");
}
cout<<endl;
l++,r--;//每行第一组的第一个*在随着行数向下,而向右移动
//同理每行第二组*的最后一个在随着行向下,向左移,所以l++,r--
}
return 0;
}

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









