







📝 面试求职: 「面试试题小程序」 ,内容涵盖 测试基础、Linux操作系统、MySQL数据库、Web功能测试、接口测试、APPium移动端测试、Python知识、Selenium自动化测试相关、性能测试、性能测试、计算机网络知识、Jmeter、HR面试,命中率杠杠的。(大家刷起来…)
📝 职场经验干货:
2025年,全球自动驾驶渗透率突破45%,L3级功能成为新车标配,C-NCAP将AEB夜间行人识别纳入五星评级强制项。在这场技术革命中,车企的军备竞赛已从硬件堆料转向功能可靠性验证——而车载测试工程师,正是这场战役中的“守门人”。
不同于算法工程师的代码狂飙,也不同于产品经理的宏大叙事,车载功能测试的日常:用最朴素的测试用例,解剖最复杂的智能系统。这里没有“996福报”,却有对毫米级误差的零容忍;无需追逐风口,但需在法规与安全的边界上反复推敲。
车载测试知多少
1.ADAS工作原理(功能逻辑/技术要点)?
首先依赖感知传感器对道路周边环境信息进行采集,包括摄像头、激光雷达、毫米波雷达和超声波传感器、高精地图、GNSS卫星定位、IMU惯性导航等。
采集的数据传输到中央计算单元进行计算,用来识别自车周边障碍物的状态和可行驶区域,制定相应控制策略,替代人类做出驾驶决策,(如路径规划等)。最后是执行控制模块制定方向盘转角、线控加减速、线控制动等信息,传输到底盘执行机构,按照指令进行精确执行。
2.各功能都需要用到哪些传感器?
多数功能都是依靠的前置传感器(经过Lidar、Radar、Camera融合),比如ACC、AEB、LKA、NOA、TJA、FCW等,只有少数涉及周视传感器,比如BSD、CVW、DOW。

3.用例规模?

4.ADAS各功能测试顺序、依据?
说明:功能测试一般先测与前视传感器相关功能,最后测与环视/测试传感器相关功能:
①ACC、AEB、LKA(跟前视传感器相关)
②BSD、LKA、DOW(跟侧视/环视传感器相关)
5.一个功能验证需要多长时间?
例:与测试用例规模有关,少则四五天,多则十几天。
6.一天执行多少条用例?
例:8-10条/天(测试前需要调试设备及测试过程中可能会遇到设备故障等问题,因此一天执行的测试用例数不会太多)。
7.测试过程中发现什么问题?痛点是什么?
数据只采集一次可能会出现无效数据,所以通常一条用例执行两次。
8.测试用例有多少?
按功能分,少则七八条,多则四五十条。
9.功能验证迭代周期?迭代哪些内容?
周期:少则半个月,多则一个月;
迭代内容:底层通讯、网络管理、诊断、刷写、信息安全、OTA。
10.ACC原理?预期结果?
原理:设定跟车距离和速度跟随前车行驶。
预期结果有:
①设定车速和跟车距离后会有加速到指定车速的时间范围,通常是20几秒;
②达到设定速度后变化率要小于1km之类的,跟车距离同理;
③如果前面有车切速度小于自车车速,自车减速对减速度有要求,比如3.5m/m2,④如果前车静止了,自车有个跟停距离要求,比如2-3m。
11.ACC弯道怎么跟车?
弧度过大,ACC不会生效。
试验场有不同曲率的弯道,比如125m、250m、500m的,根据需求跟车行驶,看是否会减速,能不能驶出弯道等。
12.ACC采集信号有哪些?
距离和速度(横纵向)、加速度、航向角等。
13.ACC跟车,假如到红绿灯,前方车辆突然刹车,自车却没有刹车,这是什么原因导致的呢?
距离过近,导致超出ACC生效范围(ADAS各功能生效都有严格的条件)。
14.AEB制动安全距离?
例:需求文档中要全为0.5m—2m。
15.AEB目标物选取原则?
无论是目标车还是行人、两轮车,都会选用假目标物代替(真人/真车易发生事故)。
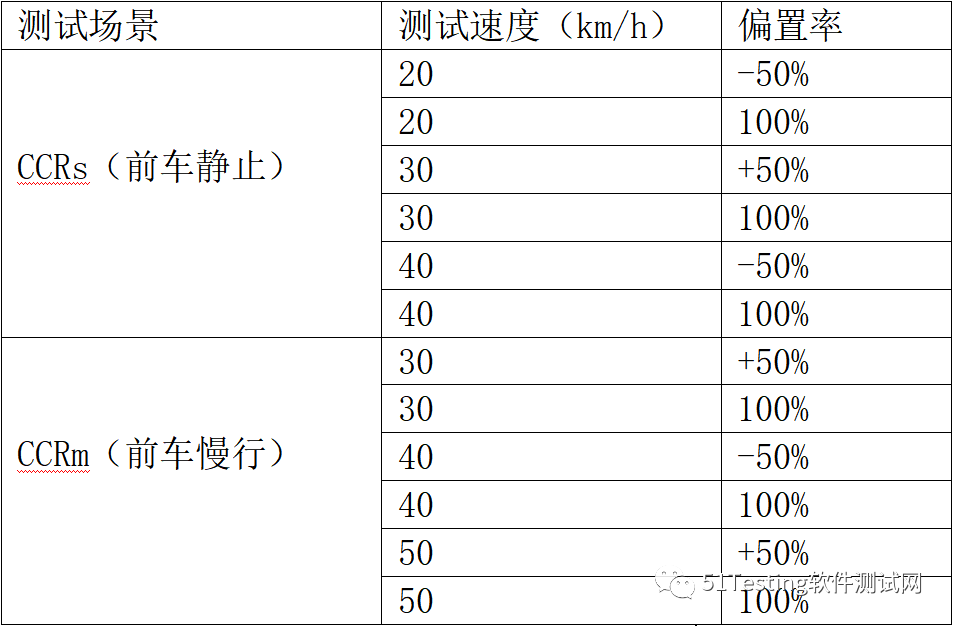
16.AEB测试场景?
①车辆追尾自动紧急制动系统(AEB CCR)
AEB CCR 系统包含两种测试场景:CCRs、CCRm。
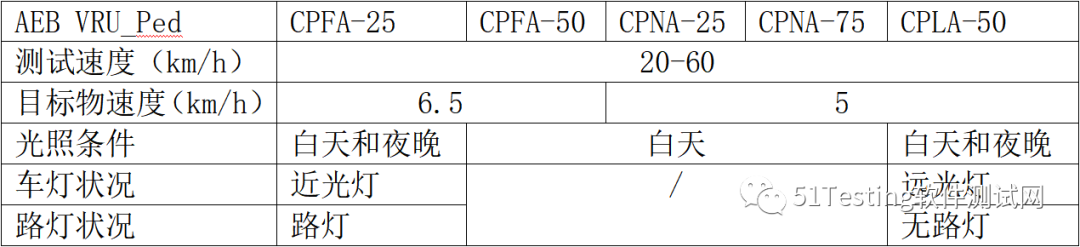
②行人自动紧急制动系统(AEB VRU_Ped)
③二轮车自动紧急制动系统(AEB VRU_TW)

17.AEB鬼探头,前方突然出现行人,触发AEB却没刹住,这是什么原因呢?
①测试场景超出AEB触发范围;
②传感器性能问题,如Radar本身对行人,尤其是静止物体识别能力较差。
18.EMA测试场景有哪些?
例:前车速度10kph,自车速度60kph,两车相距150m,偏置率50%或100%,FCW功能触发后1s内以150°/s的速度转动方向盘,转动角度为15°。
其他场景还有前车横穿以及前车为两轮车,其他参数保持不变。
19.EBA和AEB的区别?
EBA可以看成AEB的加强版,当AEB自动紧急制动时制动力不足时EBA会介入增加制动力。
20.LDW测试场景?预期结果?
测试场景:包括直道和弯道,还有实线和虚线;
预期结果:报警时刻不晚于车轮外沿到车道线0.2m。
21.法规有哪些?
C-NCAP
E-NCAP
I-Vista
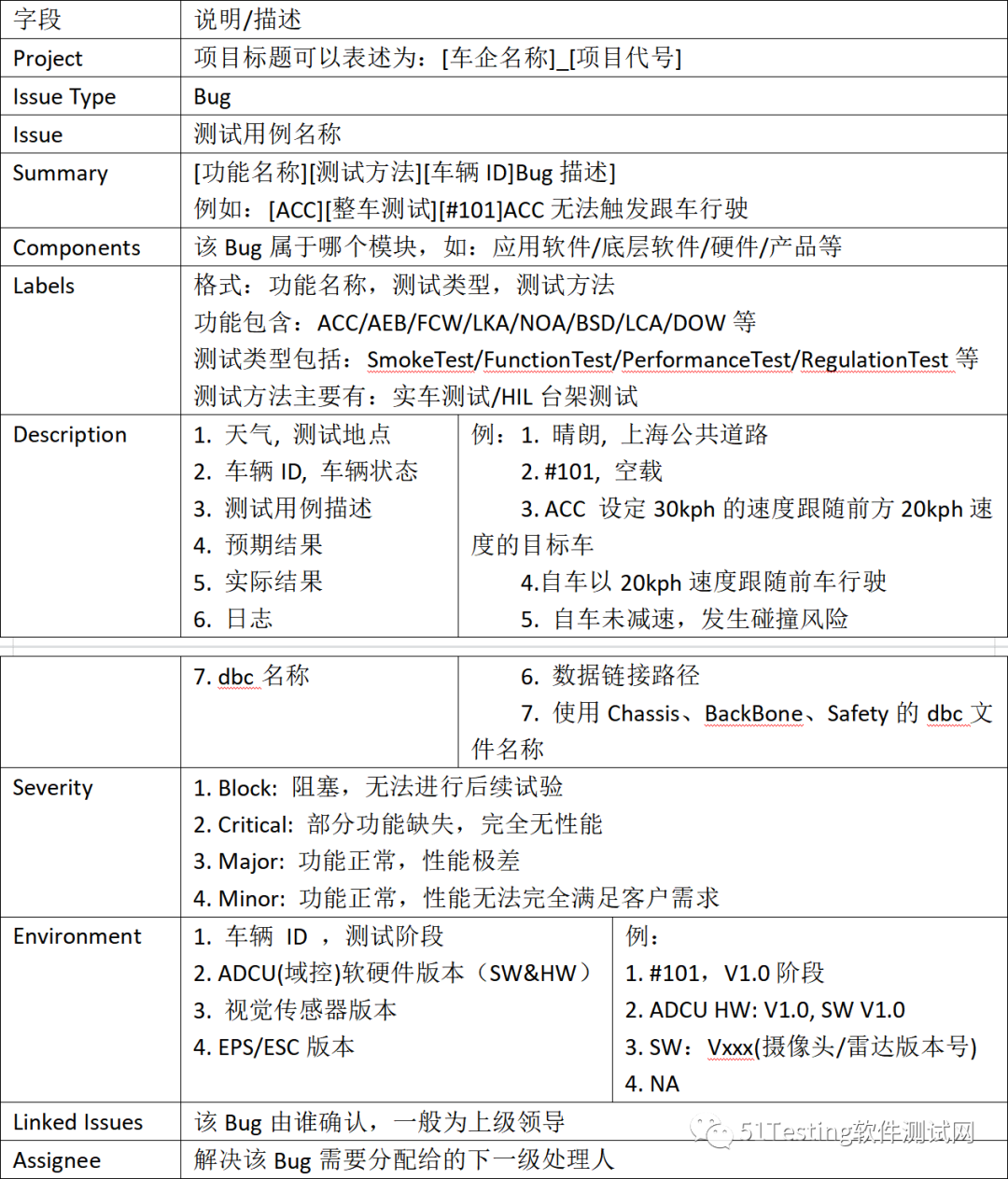
22.测试中出现BUG问题如何处理?
JIRA中建问题单。
23.问题单如何建?有哪些要素?
例:问题单主要字段描述如下:
24.波特率的作用?设置多少?
波特率越高,通讯距离有限(制约距离的原因是信号延迟);
两节点之间波特率偏差较大会导致通讯失败,我们测试时车身、底盘、真值都设置为500。
结语
当行业热议“自动驾驶终局之战”时,测试工程师的日常依然围绕着“0.1°的标定误差”和“300ms的响应延迟”**展开。这种“不卷”,是对技术敬畏的另一种表达:
-
平凡之处:日复一日的用例执行、数据比对、问题闭环
-
非凡价值:每减少一次AEB误触发,可能避免一场交通事故;每优化1%的传感器融合精度,都在重塑人与机器的信任边界
2025年的车载测试工程师,不再是流水线上的“工具人”,而是安全与体验的架构师。当未来某天,你的汽车在暴雨中稳稳刹停,或许正源于某个测试员在试验场反复执行的第八次鬼探头测试——这就是技术时代最温柔的浪漫。
最后: 下方这份完整的软件测试视频教程已经整理上传完成,需要的朋友们可以自行领取【保证100%免费】



















 2391
2391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









