



导读
在空地协作任务中,无人机(UAV)往往要跟随地面车(UGV)执行诸如跟随、环绕、降落等动作。
如果无人机仍在“世界坐标系”里控制,就得不断重新计算全局位置、更新轨迹规划,既费算力又依赖GPS或SLAM。为了解决这个问题,研究者让无人机直接在UGV的坐标系中飞行——也就是让无人机始终以地面车为参照物,控制“相对位置”而非“世界位置”。这样做能摆脱全局定位依赖,让系统在无GPS、无地图的环境中也能稳定协作。
但问题也随之出现:
因为UGV本身在动,它的坐标系也是非惯性的。在这个坐标系下,即使地面上的障碍是静止的,也会表现为“在动”——墙壁、路障、甚至静止物体都会随坐标系的运动而“漂移”。
所以,这篇论文正是解决了一个关键难题:
无人机如何在这种动态、非惯性坐标系下实现实时避障。
为此,他们提出了 CoNi-OA,一种基于单帧 LiDAR 数据的速度调制机制,能在毫秒级别上修正无人机的运动方向,使其在动态坐标系中依然能保持安全、平滑的飞行。
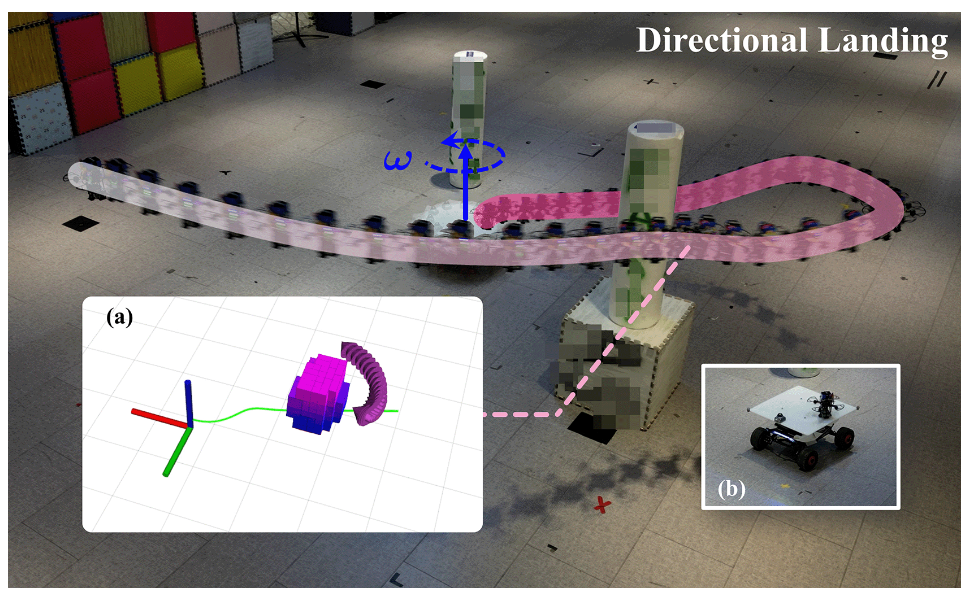
图1|无人机通过 CoNi-OA 算法,在地面车(UGV)的旋转平台上实现精确降落。绿色轨迹为原先规划的安全路径,当平台运动导致路径受阻时,无人机能主动绕开障碍并重新对准着陆方向。(a)为第三人称视角展示避障过程,(b)为成功降落的瞬间
论文出处:RAL2025
论文标题:Global-State-Free Obstacle Avoidance for Quadrotor Control in Air-Ground Cooperation
论文作者:Baozhe Zhang, Xinwei Chen, Qingcheng Chen, Chao Xu, Fei Gao, Yanjun Cao
论文链接:https://arxiv.org/pdf/2510.24315

在传统控制框架中,无人机的轨迹都在世界坐标系(inertial frame)中规划;而在 CoNi 系列框架中,研究者把控制系统直接放在地面车的非惯性坐标系(non-inertial frame)中。
这样的好处是显而易见的:
● 无需 GPS 或外部定位;
● 可以在无特征、动态环境中工作;
● 让无人机与地面车的协作更紧密。
但也带来新难题:在非惯性坐标下,静止障碍在数学上会变成“动态障碍”。例如,一堵原本不动的墙,在移动的UGV视角中却会“漂移”。要在这样的坐标系中实现避障,无人机不仅要对动态环境快速反应,还得保证自身动力学约束的可行性。
研究团队的灵感来自于调制动力系统(Modulated Dynamical System)。他们让无人机在每次控制迭代中,用一帧LiDAR点云数据计算出一个调制矩阵(modulation matrix),这个矩阵就像一个实时生成的“速度偏转力场”,会把无人机的初始速度修正为远离障碍物的安全方向。
于是,无人机能在地车坐标系下生成一条局部无碰撞轨迹(collision-free trajectory),并由 控制器实时跟踪,实现真正意义上的“相对坐标避障飞行”。
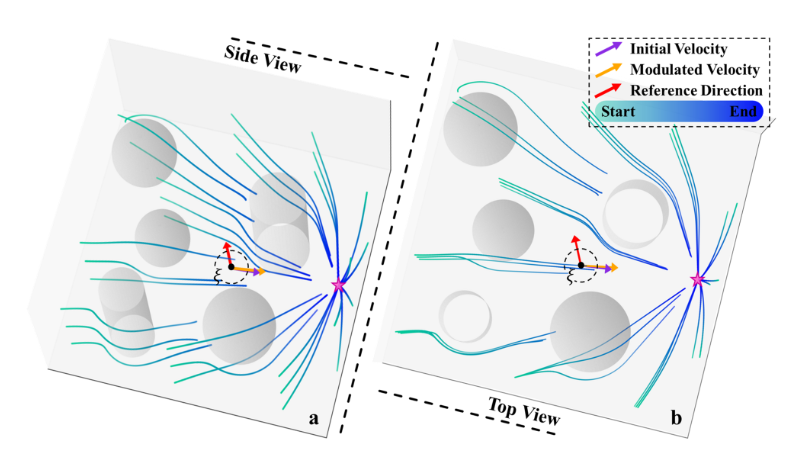
图2|图中展示了点质量模型在障碍物周围的无碰撞导航方式。红色箭头表示障碍物合成的参考方向,紫色箭头为初始速度方向,橙色箭头为经调制后的安全速度方向。通过这种“速度偏转”,无人机能在不碰撞的情况下自然绕行障碍

非惯性坐标避障:摆脱全局定位束缚
CoNi-OA 是首个在UGV非惯性参考系下进行避障的算法。无需SLAM或GPS,无人机直接在“地车视角”中生成避障轨迹,可适用于未知、特征稀缺或无定位环境。这使得空地协作系统能够在室内、地下或GPS盲区中安全运行。
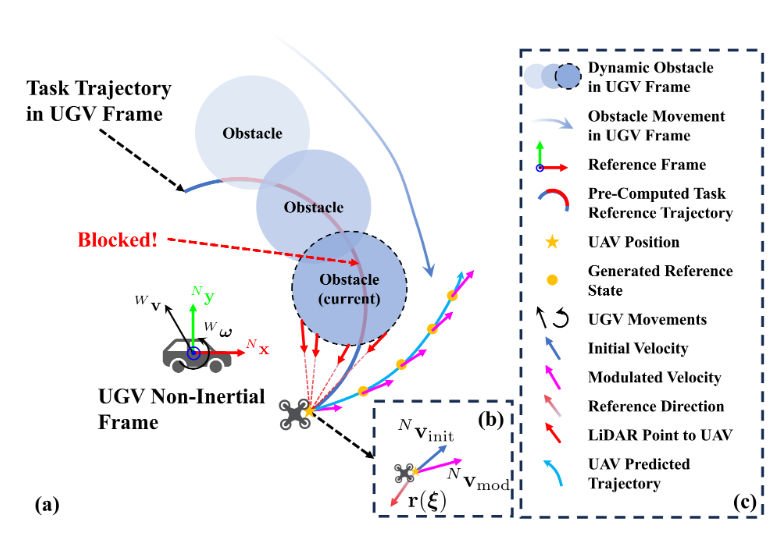
图3|该图展示了 CoNi-OA 如何在非惯性坐标系下为无人机规划安全路径。(a)无人机依据 LiDAR 数据在地车坐标系中计算避障轨迹,即使UGV运动不可预测也能实时调整;(b)通过调制原始速度向量,无人机可生成朝向目标的无碰撞路径;(c)为对应标签说明
单帧LiDAR反应式调制:5毫秒完成避障决策
不同于需要环境建模或优化求解的传统方法,CoNi-OA 仅利用单帧LiDAR点云计算调制矩阵,直接调整速度方向。整个过程在 5 ms 内完成,可在 100 Hz 控制频率下实时运行。这种“即看即反应”的方式让无人机能在障碍突现时快速避让,不受延迟影响。
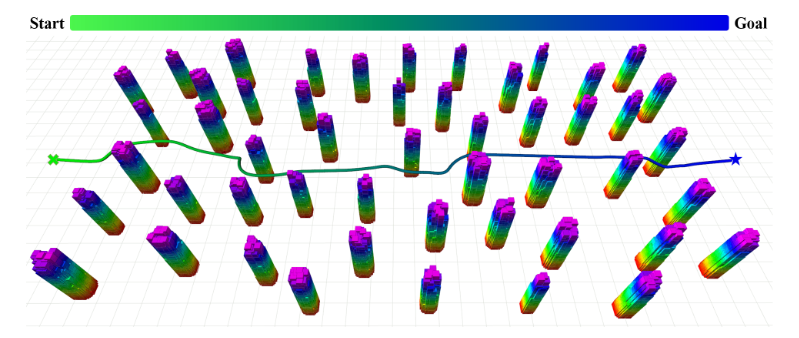
图4|由算法生成的安全飞行轨迹根,路径从起点的绿色逐渐过渡到终点的蓝色,展现了无人机在避障过程中平滑地向目标推进,并可以以非常灵敏的反应速度避开障碍
通用性强:从协作到单机都能用
虽然设计初衷是为空地协作系统提供安全机制,但 CoNi-OA 的调制机制同样适用于单独飞行的无人机。当UGV静止时,算法会自然退化为世界坐标下的避障策略,保持一致的动力学约束与稳定性。这让 CoNi-OA 成为一种通用的本地避障框架,不仅适用于协作任务,也能扩展到多机协同与动态场景。
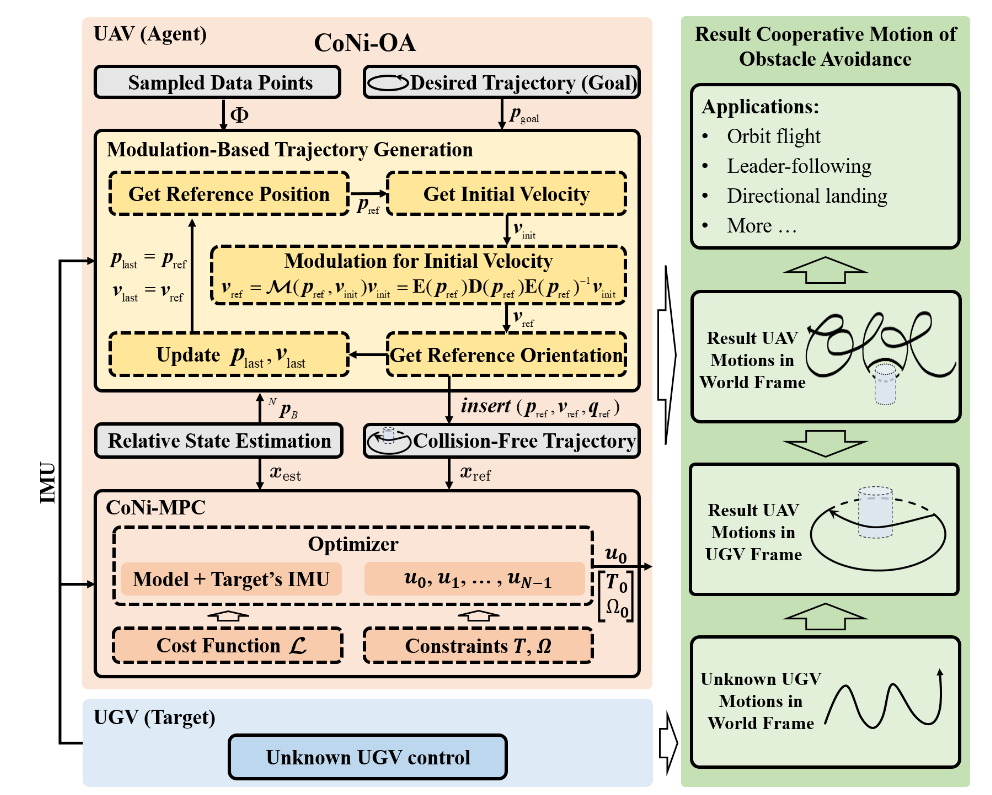
图5|CoNi-OA 的系统框架示意。算法利用无人机的相对位姿与 LiDAR 点云生成局部无碰撞轨迹,并由 CoNi-MPC 控制器实时跟踪,实现空地协作中的自主避障
研究团队在真实平台上进行了系列验证。无人机搭载 Livox Mid-360 激光雷达和 Intel N100 处理器,运行 CoNi-MPC 控制器;仅用 0.24 毫秒 完成一次控制计算,轨迹生成耗时 约4.9毫秒。在三类典型协作任务中——
● Leader-following:无人机跟随地面车移动;
● Orbit flight:无人机环绕运动目标飞行;
● Directional landing:无人机降落在旋转平台上;
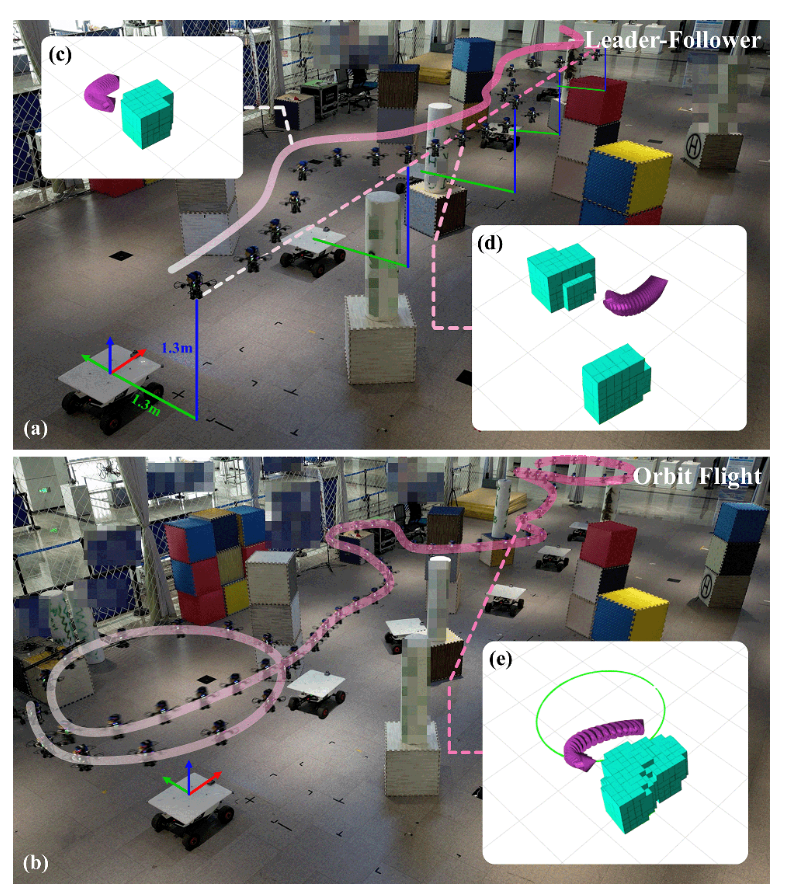
图6|图中展示无人机在两类任务中的表现:(a)为跟随任务,(b) 为环绕飞行任务,(c)-(e) 展示无人机在遭遇障碍时生成的避障轨迹。无论任务类型如何,CoNi-OA 都能使无人机保持稳定、安全的相对运动
CoNi-OA 均能平滑地避开障碍并重新回到任务轨迹。与 Ego-Planner、VO、AVO 等主流算法的对比显示,在不同障碍密度与地车速度条件下,CoNi-OA 的成功率平均提升 30% 以上,在高密度障碍场景下仍保持超过 50% 的安全避障成功率。这一结果意味着:即使地车以随机方式运动、障碍物动态变化,无人机也能在没有任何全局定位的前提下稳定飞行。
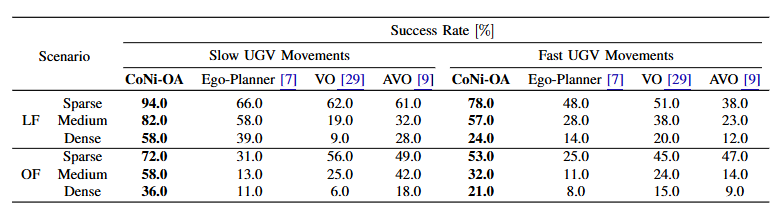
图7|不同算法在多种场景下的避障成功率对比:列出了 CoNi-OA、Ego-Planner、VO 与 AVO 在不同障碍密度及UGV速度条件下的任务成功率(共100次实验)。当无人机始终与障碍保持 0.1 米以上距离视为成功。结果显示 CoNi-OA 在多数场景中均显著领先
这项工作为空地协作系统带来了一个重要信号:避障不一定要知道世界坐标。通过单帧感知+动力学调制,浙大团队让无人机在“相对世界”中完成安全决策,为未来的无GPS协作、分布式控制和多机器人非惯性协作提供了新范式。未来,作者团队计划提升LiDAR采样频率,并将 CoNi-OA 扩展到多机器人协同避障与高频视觉感知融合场景中。
你觉得,未来的无人机还需要“知道自己在哪里”才能安全飞行吗?


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









