



导语
在复杂水域环境下,无人水面艇(Unmanned Surface Vehicle, USV)集群的路径规划问题长期面临环境适应性有限、鲁棒性不足的挑战。针对这一问题,上海交通大学海洋智能装备与系统教育部重点实验室团队提出大模型驱动的自适应路径规划方法(APPT),通过深度整合大模型的概率推理能力与经典路径规划算法的确定性优势,为USV集群的自主决策开辟新范式!
论文题目:大模型驱动的 USV 集群自适应路径规划方法
论文作者:史岳橙 , 焦锐阳 , 吕沐 , 李梅 , 高睿
论文链接:https://ship-research.com/article/doi/10.19693/j.issn.1673-3185.04511

USV集群在海上救援、环境监测等领域应用广泛,但传统路径规划方法(如A、RRT等)存在亟待突破的瓶颈:
挑战一:面向复杂动态环境的实时应对不足
复杂海洋环境下的多源异构数据传统方式难以处理,对未知动态障碍物的有效预测和处理方法欠缺。
挑战二:集群规划时规则动态难以选择
多船交互时同时触发多条规则,但规则间优先级缺乏明确量化标准。若需为每艘船评估所有规则组合,计算量随船舶数量呈指数增长。
挑战三:传统规划算法存在局限性
传统算法基于静态规则库难以快速切换逻辑,且传统规则库无法通过历史数据优化选择策略,缺乏学习能力。 那么如何让USV集群像“老船长”一样灵活避障、高效规划?大模型技术提供了新思路!
团队创新提出基于大模型 的面向USV集群路径规划问题的APPT方法,方法框架如图1所示:
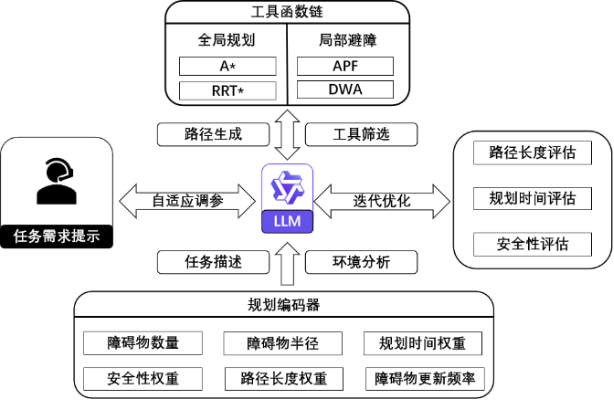
图1|USV集群自适应路径规划方法框架
通过四大核心技术实现基于大模型技术的路径规划方法的革命性优化:
1.大模型智能体搭建
APPT方法首先基于通义千问(Qwen)大模型,构建了具备环境感知与决策能力的智能体。在构建可执行物理动作的生成式智能体以实现 USV 集群路径规划时,需解决两大核心问题:大模型需理解 USV 集群路径规划任务所涉及的物理模型,需将任务指令转化为可执行的动作序列。为解决此类问题,基于大语言模型的COT思想,本文提出基于现有的路径规划算法库(如 RRT, APF 方法等)及其对应 API 接口,构建功能完备的工具函数提示体系,通过补充算法功能的语义描述与调用规则,帮助大模型理解算法功能,创建任务目标的功能库。在大模型完成对用户自然对话解析后,实现规划任务背景的编码,同步考虑环境约束、任务优先级等多方面限制条件,完成最终的方法组装与智能体动作执行。
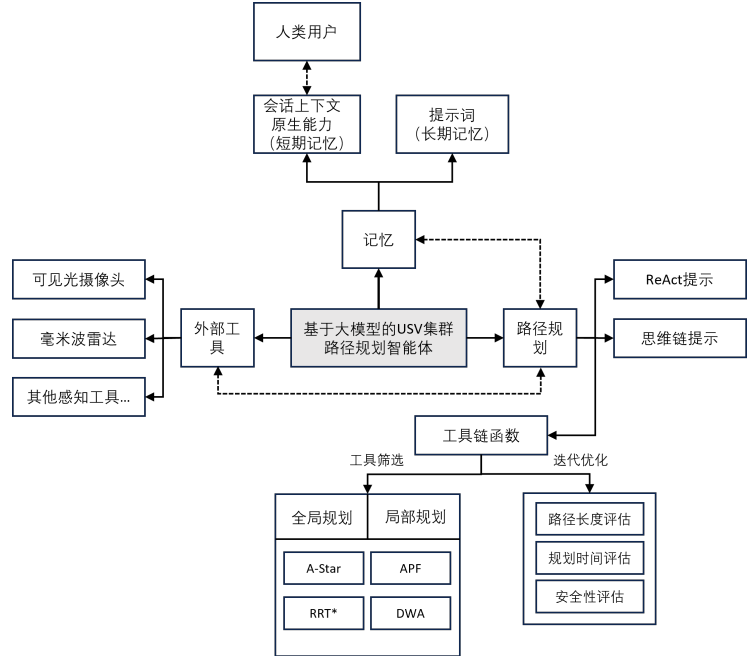
图2|面向USV集群路径规划的智能体框架
2.USV集群路径规划编码器设计
在完成大模型智能体构建的基础上,为有效融合大模型的全局分析能力与规划工具函数的局部最优搜索机制,本文提出基于环境特征与任务约束融合的USV集群路径规划编码器设计方法,进而实现路径规划的效率与最优性的平衡。大模型通过解析任务场景中的障碍物密度、动态变化等环境特征,以及路径长度限制、规划时间阈值等任务约束条件,将信息编码为结构化提示向量。如表1所示。
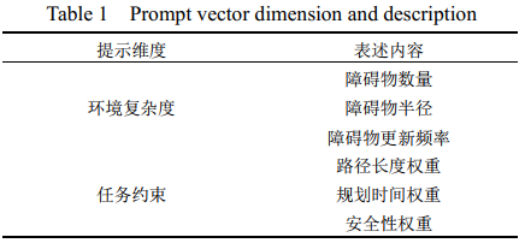
表1|提示向量维度及描述
该提示向量体现了路径规划的环境特征,大模型通过公式(1) 计算提示向量与工具函数对应能力特征向量的余弦相似度:
(1)
式中,A是提示向量,B是工具函数的嵌入向量,该向量数据是由大模型根据提示生成,即对不同算法组合在各指标上的性能分析。提示模版如表2所示。
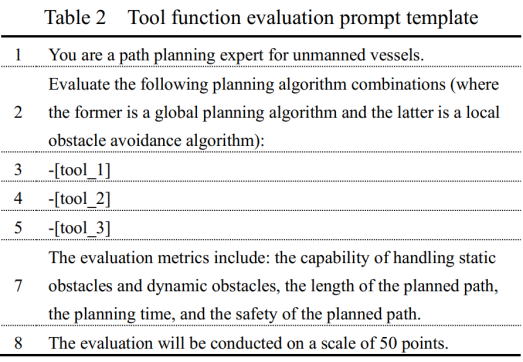
表 2|工具函数评估提示模版
3.工具函数链动态组装
大模型基于任务提示向量,计算工具函数与提示的匹配度,实现对最优工具的组合搜索。在USV 集群路径规划中,利用领航跟随法的编队思想,大模型首先完成领航船全局路径生成。由于A和 RRT算法的可扩展性较强且能借助自适应优化机制改进算法特性,因此选取这两类算法作为全局路径规划工具函数。当领航船或跟随船遭遇动态障碍物时,需要设置局部规划函数模块实现动态避障。鉴于实验场景中对算法的实时性要求,选择 APF 和 DWA算法作为局部规划工具函数。
本文的 APPT 方法通过保留工具链中规划算法的原始多功能性,有效适配复杂环境下的 USV集群路径规划任务。与传统算法针对特定场景的定制化改进策略不同,本方法依赖于大模型的推理能力,实现工具函数的动态筛选与组合,因而具备更强的普遍适用性。图3为不同算法组合在不同指标上的性能分析结论结果,表面不同的算法组合在面向不同的环境和任务需求时具备不同的优势。
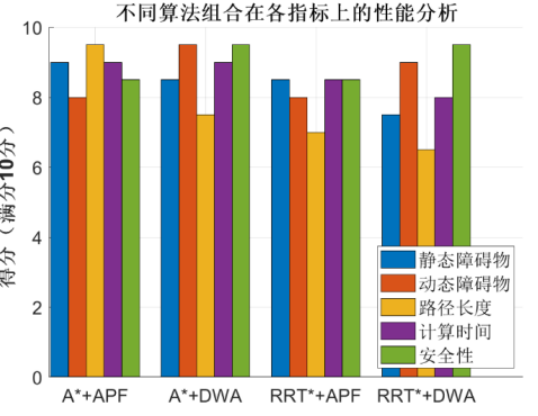
图3|面向USV集群路径规划的智能体框架
4.自适应优化机制
类似于ReAct方法的思路,通过递归的路径评估方法,依据算法性能引导大模型优化路径规划参数,利用大模型接收环境反馈来提高算法有效性。评估范畴包括规划时间、路径总长度、安全性(与障碍物最近距离)。在自适应参数调整过程中,提示模板作为大模型与工具函数间的交互方法,其设计直接影响参数优化的准确性与效率。本文构建的提示模板(详见表4)融合了USV集群任务场景特征、算法性能指标及约束条件等多维度信息,通过结构化的语义表达引导大模型对工具函数参数进行精准调节。
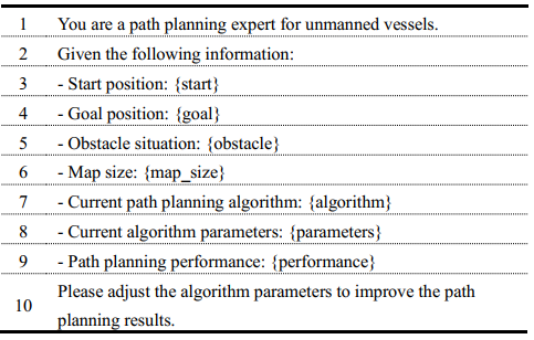
表3|参数自适应优化提示模版
实验结果:
-
路径规划工具组装实验
选取 A、RRT作为全局规划工具, APF、DWA 作为局部避障方法。工具链存在四种可能的策略组合:“A*+APF”、“A*+DWA”、“RRT*+APF”、“RRT*+DWA”。 通过对各参数进行调整,从路径长度、 规划时间、安全性三个方面对比不同环境下工具组装的准确率,实验结果如表 3 所示。
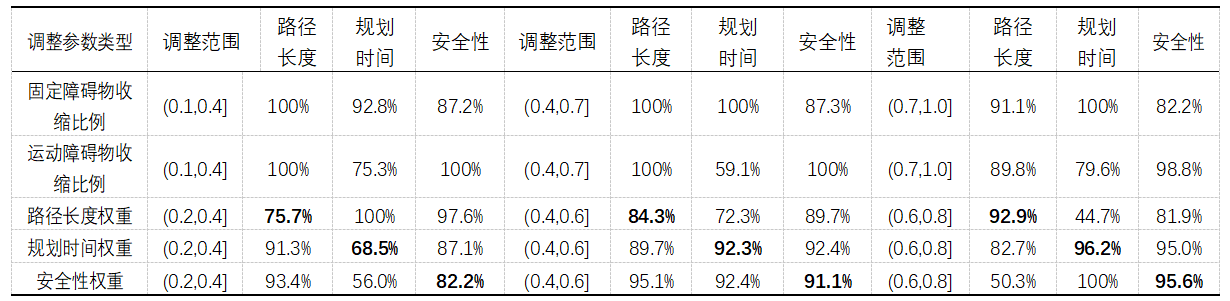
表3|路径规划工具组装实验准确率汇总表
实验结论:工具链筛选准确率达89.7%。
当动态障碍物相较于固定障碍物比例较高时,环境动态性增强,大模型优先选择灵活性强、能够快速响应障碍物变化的“RRT*+DWA”算法组合, 该组合凭借 RRT算法的随机采样特性与DWA 算法的动态窗口策略,能够快速响应障碍物变化,展现出优异的环境适应性。 在静态环境中,“A+APF” 组合则可依托 A*算法的启发式搜索与 APF 算法的势场引导,实现全局最优路径的精确求解与动态避障的高效执行。
路径长度、规划时间、安全性三方面权重参数调整过程中, 工具组装准确率能够有效匹配参数变化。 当路径长度和安全性权重较高时, “ A*+DWA” 能 够 兼 顾 两 方 面 需 求 。 而“RRT*+APF”计算效率较高,适用于实时性要求较高的情况。
-
路径规划工具自适应优化实验
完成工具链组装后,需要执行基于路径评估的自适应优化, 即利用大模型进行基于提示的参数调整,为清晰阐释优化机制,本文以“RRT*+APF”组合为例(其余组合优化逻辑与之类似), 其初始参数如表 4 所示,规划结果如图4所示。
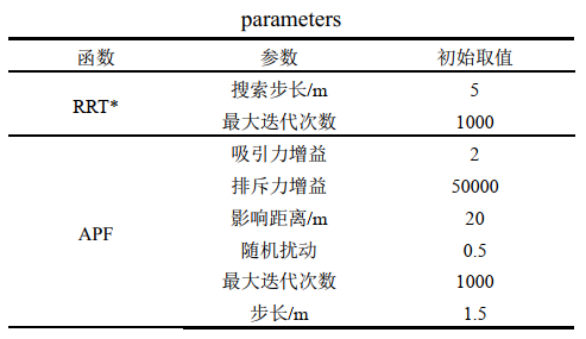
表4|“RRT*+APF”算法参数初始取值
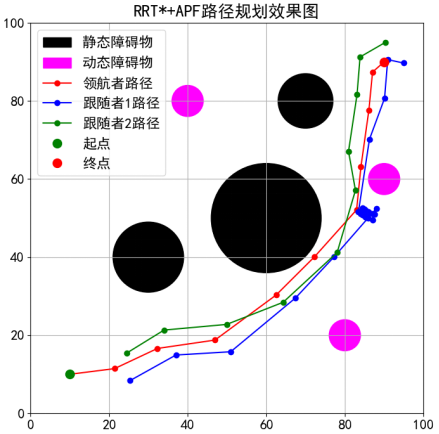
图4|优化前“RRT*+APF”路径规划效果
实验结果显示,本次路径规划任务耗时 1.40秒,规划所得路径总长度为 397.76 米,最小安全距离为 6.49 米。结合图 4 可视化分析可知,在动态避障阶段,且 APF 算法存在最小值震荡现象,影响路径规划效率与平滑度。针对该问题,大模型智能体依据路径评估结果,启动参数优化机制,具体操作如表5所示。
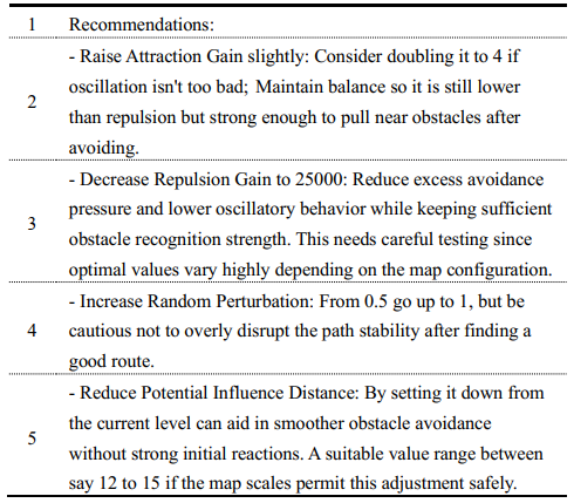
表4|智能体参数优化操作
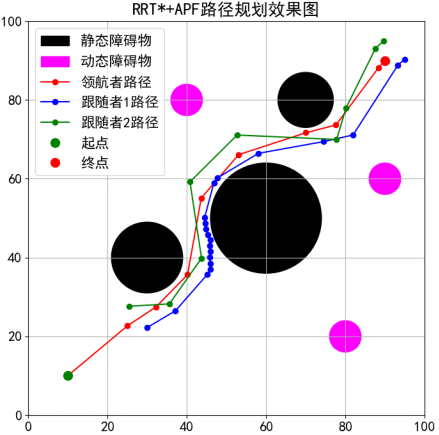
图5|优化后“RRT*+APF”路径规划效果
实验结果:优化后的路径规划结果显示,规划耗时 2.20秒,路径总长 339.89 米,安全距离 2.82 米。对比优化前, 路径对目标点的指向性更强。并且由于解决了震荡问题,路径总长度缩减了 14.55%, 优化效果显著。但同时安全距离削减了 56.55%。
-
真实环境实船实验
本次实船实验使用超维空间公司生产无人船,包括船体、遥控器、地面站三部分。实验时将基于大模型的智能体部署于无人艇地面站,使用的 GPU 为 NVIDIA GeForce RTX 4070,显存容量为 12GB,智能体使用的大模型为 Qwen2.5,模型参数为 14B, 智能体使用局部 XY 坐标系,单位为米,地图大小为 30m*30。此次测试本文添加了虚拟障碍物,障碍物位置及智能体规划出的轨迹如图6所示。无人艇很好地执行了智能体规划出的轨迹。
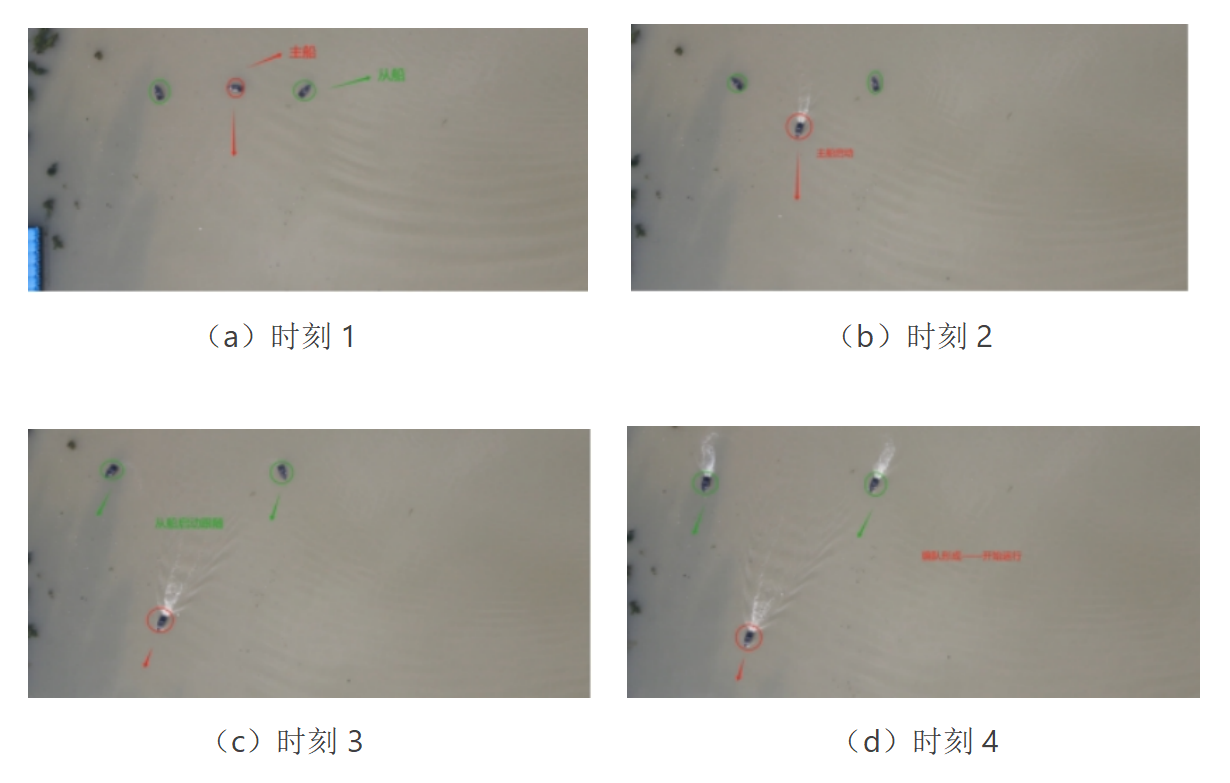
图6|USV集群实时运行结果
本文提出的APPT方法通过构建大模型驱动架构,融合环境语义理解与任务指令解析,实现任务规划、路径动态调整、异常规避的协同优化,显著提升系统智能化水平与任务鲁棒性。在面向海上巡逻、应急搜救、海洋资源探测、环境监测等任务时,能够快速适应任务需求,实现动态响应式路径优化,克服传统算法适应性不足的局限。在更多的领域为智能海洋装备系统提供核心技术支撑,推动无人艇智能化与海洋自主系统的持续发展。
-
军事领域:复杂战场环境下的多艇协同作战;
-
民用场景:海上搜救、港口巡检等任务的智能调度;
-
未来方向:结合多模态大模型,实现更高精度的环境感知与决策。
关键词:
#大模型 #USV集群 #路径规划 #人工智能 #上海交通大学
“科技赋能海洋,智能改变未来!欢迎转发讨论,共同探索AI+海洋的无限可能!”



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









