



近期关注到全球首个突破无人机配送 “最后一公里” 技术瓶颈的窗口级 VLN 系统研究,基于对前沿技术的探索与思索,编者对该论文进行了简单的复现。
特此展开技术复现实践分享,诚邀各位同仁一同探讨与交流。
在展开复现之前,我们先来聊聊相关背景。
当前基于无人机的视觉语言导航(VLN)任务普遍聚焦于粗粒度长距离目标,难以满足终端配送的精准需求。具体表现为:
-
现有无人机 VLN 任务的局限性:多数研究关注长距离导航与大规模目标,在短距离小目标场景(如终端配送)中缺乏针对性探索;
-
最后一公里配送的精度瓶颈:传统地面机器人主导的最后一公里配送研究,仅能实现建筑级配送,无法覆盖更精细的窗口级交付场景。
为解决上述问题,中国科学院自动化研究所、澳门科技大学、中国科学院大学等团队提出了LogisticsVLN。
LogisticsVLN 是基于多模态大语言模型的无人机自主物流配送系统,仅使用简单传感器和轻量级大型模型,无需先验环境知识或微调,即可在未知环境中高度部署,进行楼层定位、目标检测以及行动决策,从而完成无人机自主物流配送任务。
基于以上问题点与创新技术,本文将结合模型流程图以及小编个人的复现进行详细解读。
我们开设此账号,想要向各位对【具身智能】感兴趣的人传递最前沿最权威的知识讯息外,也想和大家一起见证它到底是泡沫还是又一场热浪?
欢迎关注【深蓝具身智能】👇

方法说明
首先,我们来主要了解一下LogisticsVLN系统,然后小编将结合LogisticsVLN系统概述图进行流程讲解。
-
系统目标
当无人机到达目标建筑物附近位置时,在没有先验地图的情况下,可以基于用户指令到达特定窗口。
-
硬件概述


▲图1 | LogisticsVLN系统概述图©️【深蓝具身智能】编译
-
软件流程
(1)请求理解(图中a部分)
利用DeepSeek-R1 Distill-Qwen-14B模型,结合思维链(CoT)提示模板解析用户指令请求,提取元素为:
(2) 楼层定位(图中b部分)
该模块主要引导无人机到达目标楼层,大致说明如下:

(3)目标探索(图中c部分)
那么,在完成楼层定位之后,如何去检测目标位置的边界框?流程如下:

视点选择:如果目标识别视觉语言模型(Object Recognition VLM)不能从5个视角的RGB图像中检测到目标窗口,那么说明目标窗口可能在该层其他位置,需要让无人机绕着建筑物外围对该楼层进行巡视,以便发现目标窗口。那如何进行最优的巡视呢?
选择合适的视角是关键!

▲图2 | 理想与非理想视角下的决策效果
LogisticsVLN的方案是:
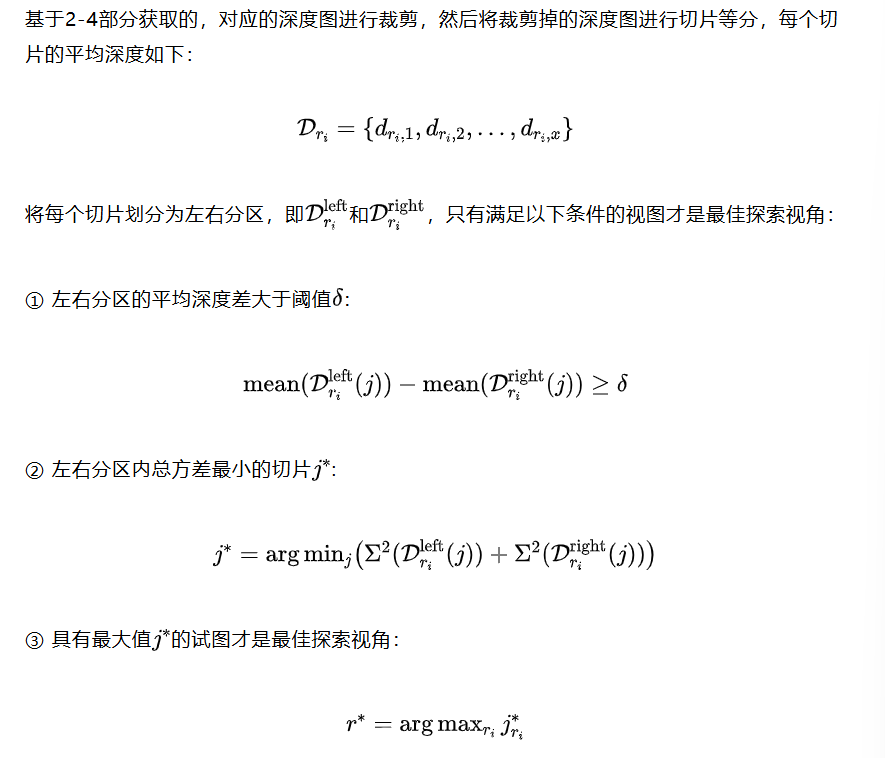
这样可以让无人机高效地朝下一个探索点航行,同时降低碰撞风险。
关于LogisticsVLN系统更详细的解析,可以查看深蓝AI此前的解读:首个窗口级无人机配送VLN系统!中科院LogisticsVLN:基于MLLM实现精准投递

实现效果
小编对论文进行了简单复现,下面进行展示和说明。
-
构建一个测试环境
Step1:先从网上随便下载一张大楼正面的图片(如图3左侧,是一面5楼的大楼,每楼有6扇窗户);
Step2:使用开源的深度估计模型(DepthAnything)对该图进行深度估计;
Step3:基于深度图生成点云模型(如下图右侧),这样就得到一个用于测试的3D大楼了;
当然也可以用仿真软件构建一个简单的测试环境。(小编先前的研究内容可以直接拿来用,所以采用了上面的方法构建了一个简单的测试环境)
▲图3 | 测试示例
-
VLN实现(和论文里面有一定出入)
(1)智能体类: 提供楼层定位、目标检测等功能
class Agent:..."""描述:使用LLM分析用户指令,得到目标楼层和窗口输入:prompt用户指令输出:目标楼层、目标窗户号"""def analy_task(self, prompt):res = self.llm(prompt)res = json.loads(res)return res["target_floor"], res["target_window"]"""描述:使用VLM估计图片中一层楼的高度输入:rgb图像输出:一层楼的高度"""def floor_height_estimate(self, rgb):prompt_name = 'floor_height_estimate'data = multiFusion(rgb, prompt_name)res = self.vlm(data)res = json.loads(res)return res["floor_height"]"""描述:使用VLM估计当前所在楼层数输入:rgb图像输出:当前楼层数"""def current_floor_number(self, rgb):prompt_name = 'current_floor_number'data = multiFusion(rgb, prompt_name)res = self.vlm(data)res = json.loads(res)return res["current_floor_number"]"""描述:使用VLM搜索目标窗口输入:rgb图像输出:目标串口边框"""def find_target_window(self, rgb):prompt_name = 'find_target_window'data = multiFusion(rgb, prompt_name)res = self.vlm(data)res = json.loads(res)return res["box_2d"]
(2)配送主进程
"""配送主进程prompt:用户指令"""def mainloop(prompt):# 实现了一个简单的无人机系统uav_controller = UAVController()# 三维重建recon3d = Recon3D()# 实现了一个简单RGB传感器sensors = Sensors()# 智能体agent = Agent()# 解析目标楼层和窗口target_floor, target_window = agent.analy_task(prompt)agent.target_floor = target_flooragent.target_window = target_windowget_next_waypoint = Falsefind_target_window = Falsetouch_target_floor = Falsebr = tf.TransformBroadcaster()while not rospy.is_shutdown():try:# 获取无人机的定位cur_x, cur_y = uav_controller.getCurrentPose()# TF变换,转化到世界坐标系下br.sendTransform((cur_x, cur_y, 30), # 位置 (x, y, z)tf.transformations.quaternion_from_euler(0, 0, 0), # 四元数表示的旋转rospy.Time.now(), # 时间戳"uav", # 无人机坐标系"world" # 世界坐标系)# 获取一帧RGBrgb = sensors.getRGB()# 对单帧图片进行三维重建,得到大楼的3D点云,并实时发布# 在小编的实现中,和论文存在差异,后续并没有使用深度图,而是用VLM去估计无人机和大楼的定位recon3d.reconstruction(rgb)# 爬升过程if touch_target_floor == False:if get_next_waypoint == False:# 获取当前楼层数current_floor = agent.current_floor(rgb)print("VLM解析结果: 当前楼层=", current_floor)# 判断当前楼层是不是目标楼层if current_floor != target_floor:# 获取1层楼高度floor_height = agent.floor_height_estimate(rgb)print("VLM解析结果: 楼层高度=", floor_height)print("移动到下一个航点")# 计算到下一个航点(目标楼层)的飞行距离fly_height = (target_floor - current_floor) * floor_height# 设置移动距离uav_controller.setDistance(fly_height)# 开始移动uav_controller.move()get_next_waypoint = Trueelse:# 进入目标检测过程touch_target_floor = Trueelse:# 判断无人机是否到达航点高度if uav_controller.isReached() == True:# 重新判断航点get_next_waypoint = Falseelse:uav_controller.move()else:# 目标检测阶段if find_target_window == False:# 获取目标窗口boundingboxbox_2d = agent.find_target_window(rgb)if box_2d is not None:y1, x1, y2, x2 = box_2dprint("VLM解析结果: 识别到目标窗口")uav_controller.setGoal((x1 + x2) * 0.5, (y1+ y2) * 0.5)find_target_window = True# 判断是否到达窗口附近if uav_controller.reachGoal() == False:uav_controller.move()else:print("抵达目标地")exit()except KeyboardInterrupt:breakfinally:time.sleep(0.01)
-
测试效果
视频见:
独家复现实录|全球首个「窗口级」VLN系统:实现空中无人机最后一公里配送
说明:
第1步:用户给出指令"送到302房间来"
第2步:使用LLM解析指令得到具体楼层和房间
第3步:使用VLM估计当前楼层
第4步:使用VLM估计楼层高度
第5步:根据3、4计算出下一个航点
第6步:重复3-5步骤,直到到达目标楼层
第7步:使用VLM估计目标窗口,最后移动到目标窗口
实现局限:
1. 目前使用VLM在楼层高度上的估计效果不好,这就导致航点的计算经常容易出错,但比较幸运的是,在多次上上下下往复的调整过程中,最终基本都能找到正确的目标楼层。所以后续的目标是提高VLM在楼层高度上的估计精度;
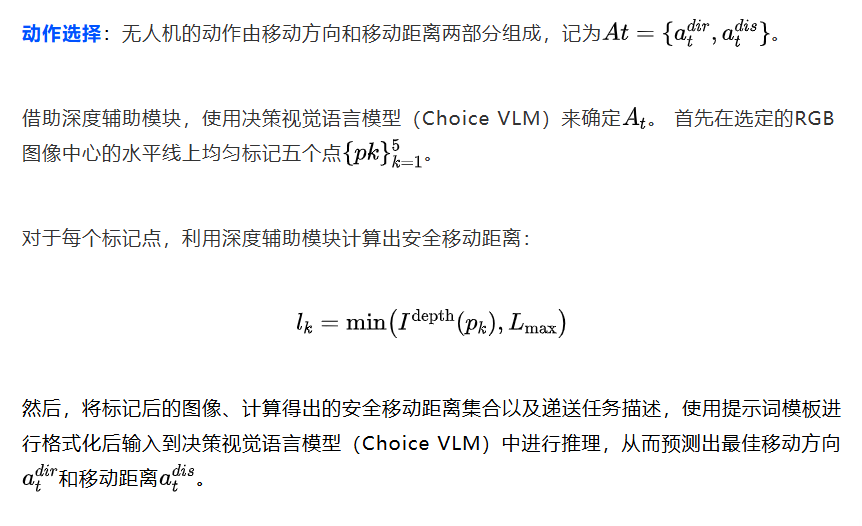
2. 目前使用传统的规划算法实现的导航,后续的目标将结合VLM进行action的预测输出。

总结
本文聚焦智能物流终端配送难题,针对当前无人机的视觉语言导航任务多关注长距离目标,地面机器人配送精度不足等问题,LogisticsVLN借助VLM模型的强大感知能力,无需进行特定任务训练,也不用预先构建地图,便可以完成无人机自主物流配送任务。
未来可进一步优化模型轻量化程度,提升复杂动态环境下的鲁棒性,加强多模态信息融合的精准度,探索更多应用场景以提升系统通用性,同时研究如何降低能耗、延长无人机续航时间,更好地满足实际物流配送需求。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









