




目录
inv_mpu_dmp_motion_driver.c 和.h 修改
这是官方的原版eMPL文件
通过网盘分享的文件:eMPL
链接: https://pan.baidu.com/s/1BpWmEqj30FbpkVhOWylSrA?pwd=jvif 提取码: jvif
--来自百度网盘超级会员v5的分享

inv_mpu.c修改
1、增加定义和声明
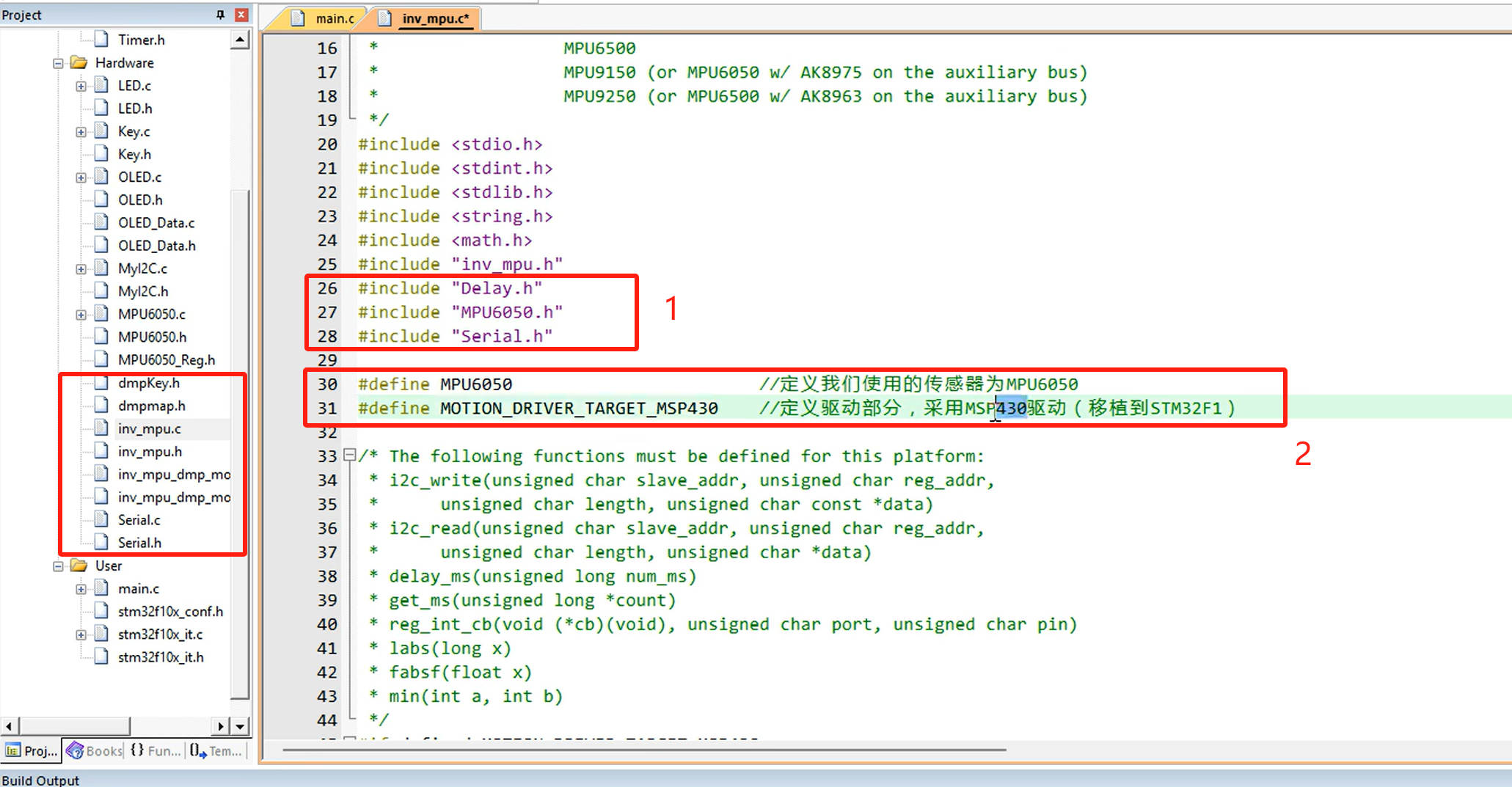
#include "MPU6050.h"
#include "Delay.h"
#include "Serial.h" // 替换成自己的有串口的文件
#define MPU6050 //定义我们使用的传感器为MPU6050
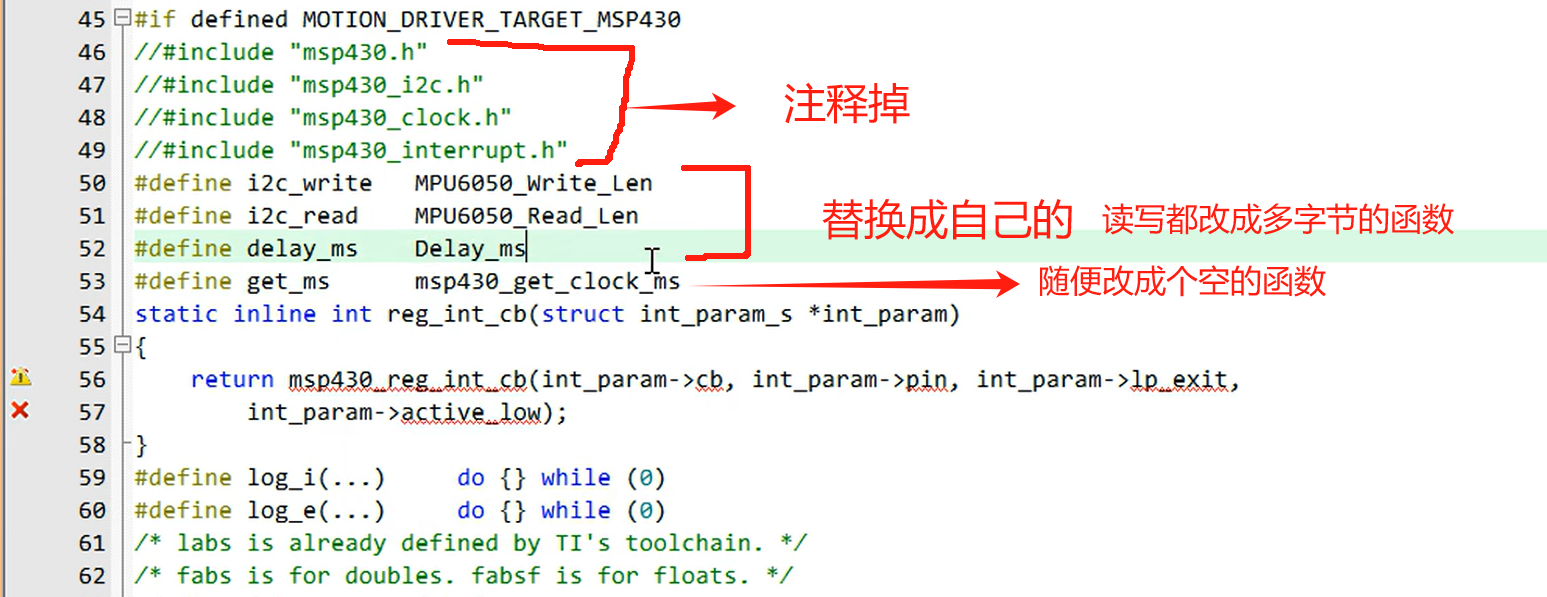
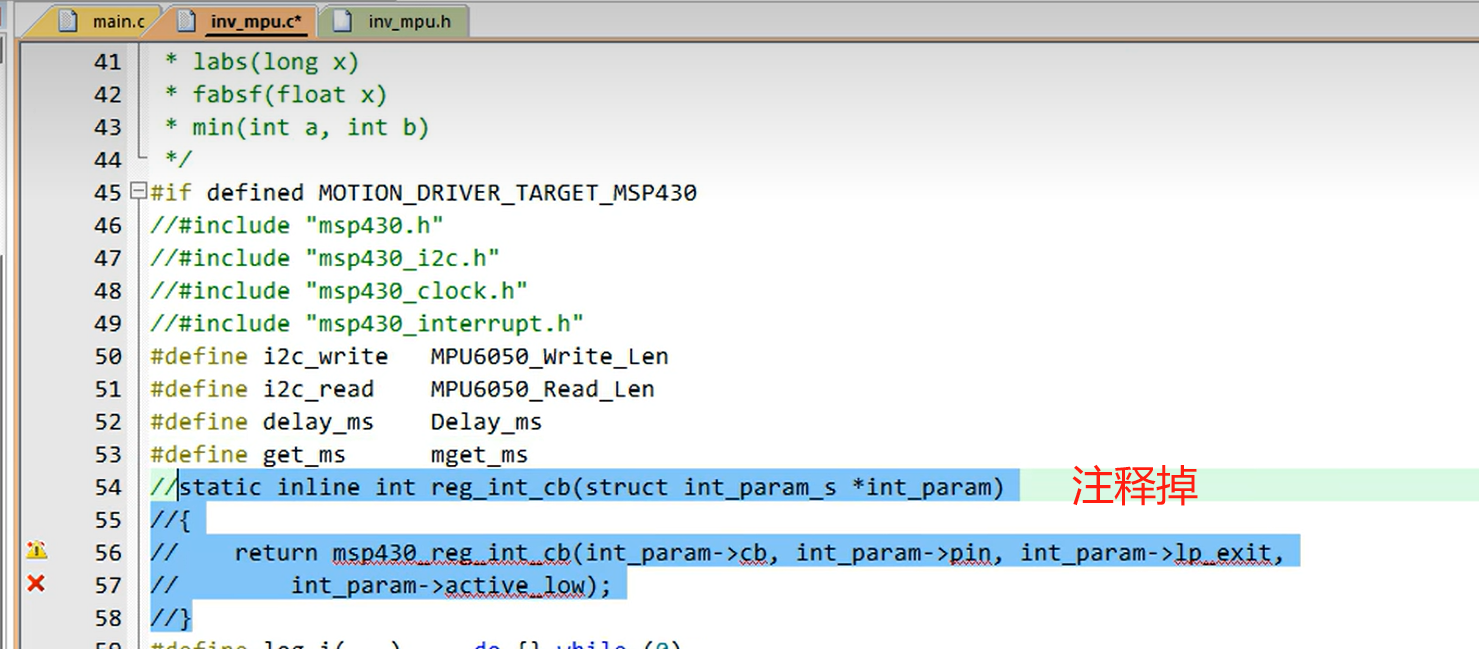
#define MOTION_DRIVER_TARGET_MSP430 //定义驱动部分,采用MSP430驱动(移植到STM32F1)2、注释和函数接口修改
![]()
新写的mget_ms函数放在.c文件后面,并在.h头文件中声明
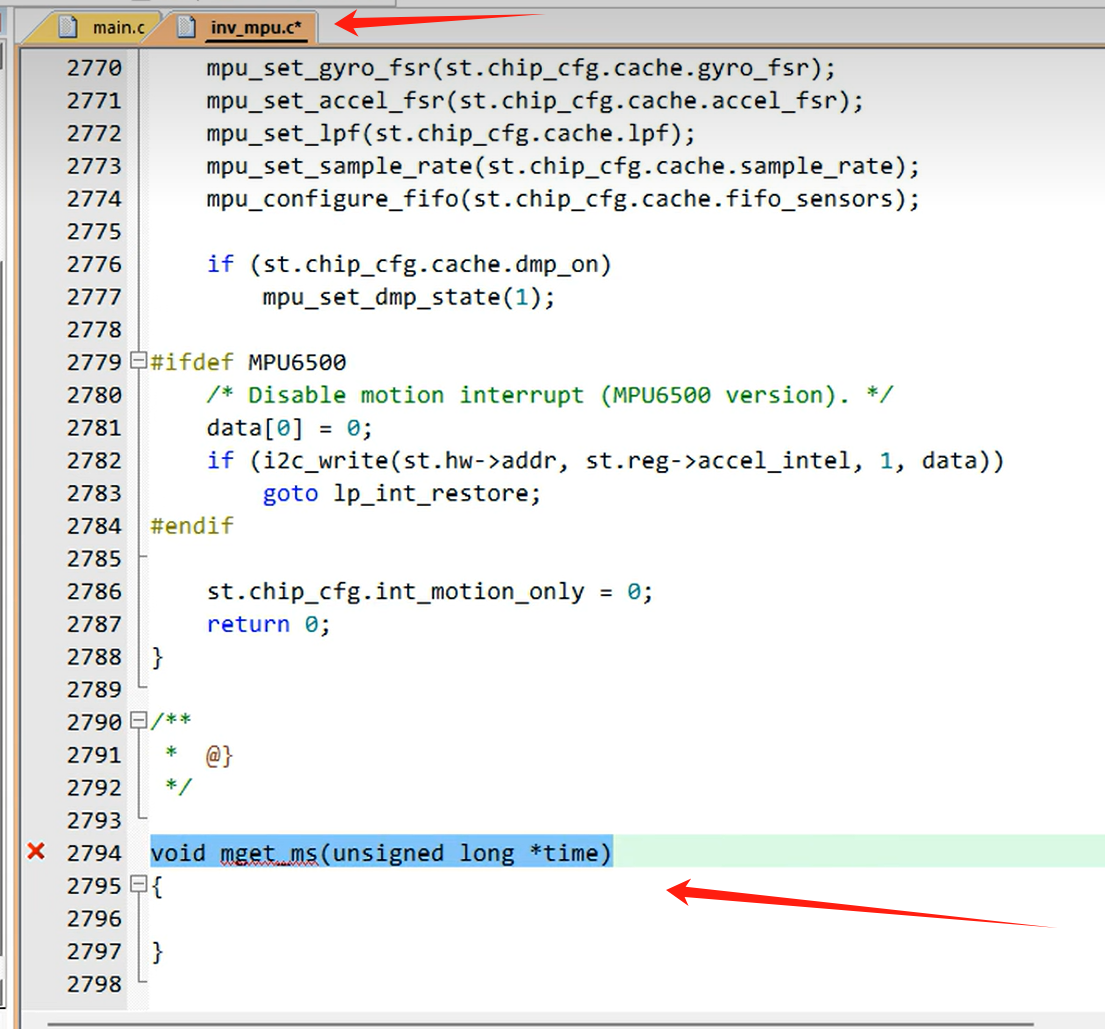
void mget_ms(unsigned long *time)
{
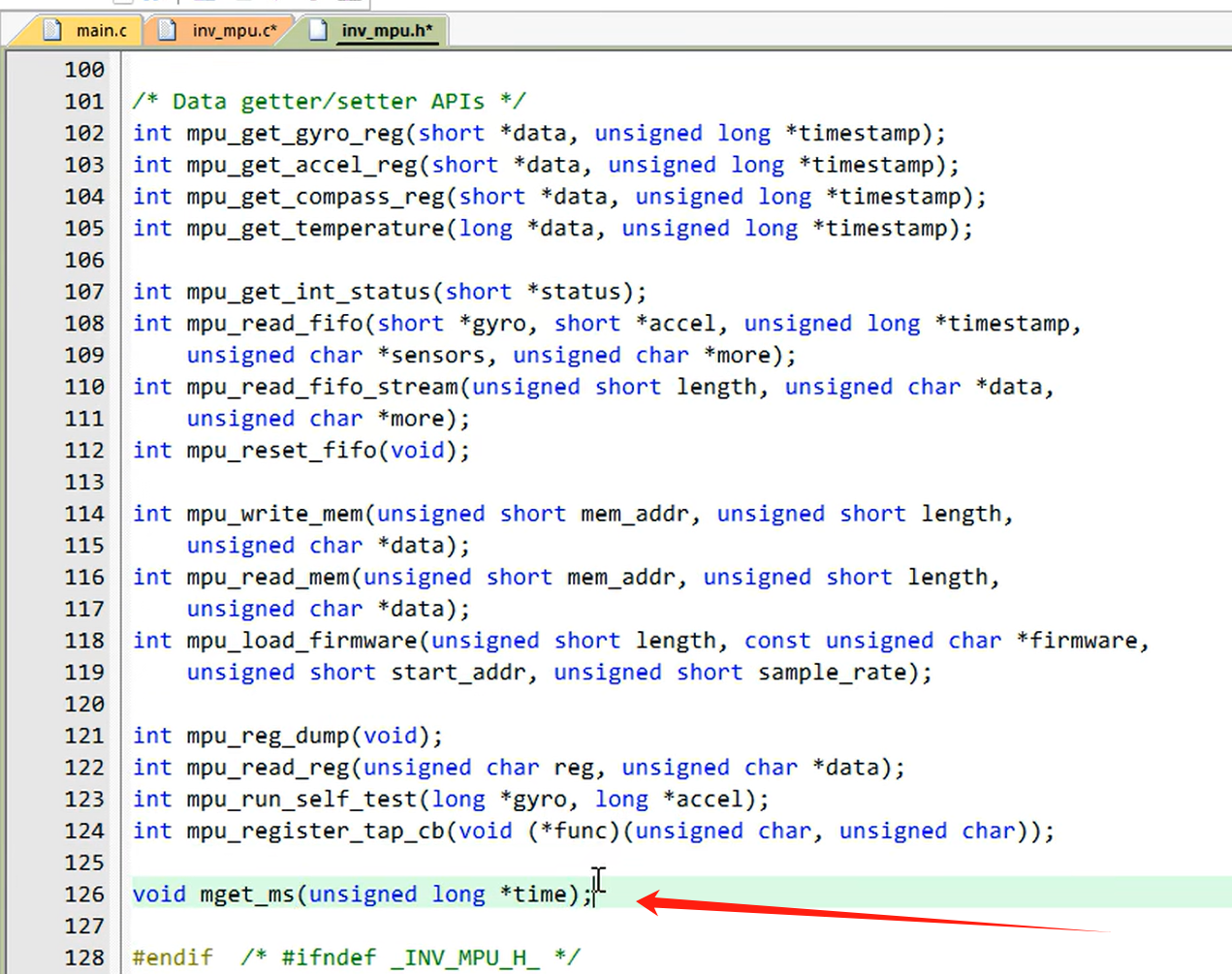
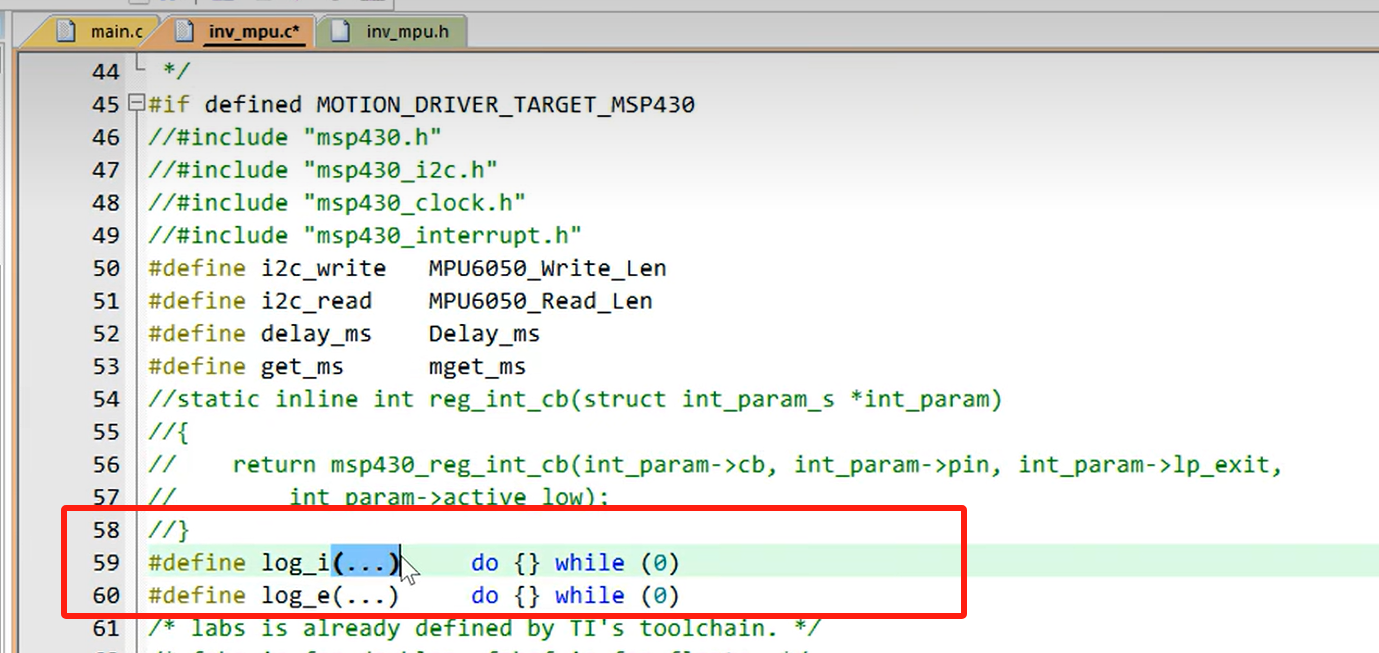
}void mget_ms(unsigned long *time);3、注释
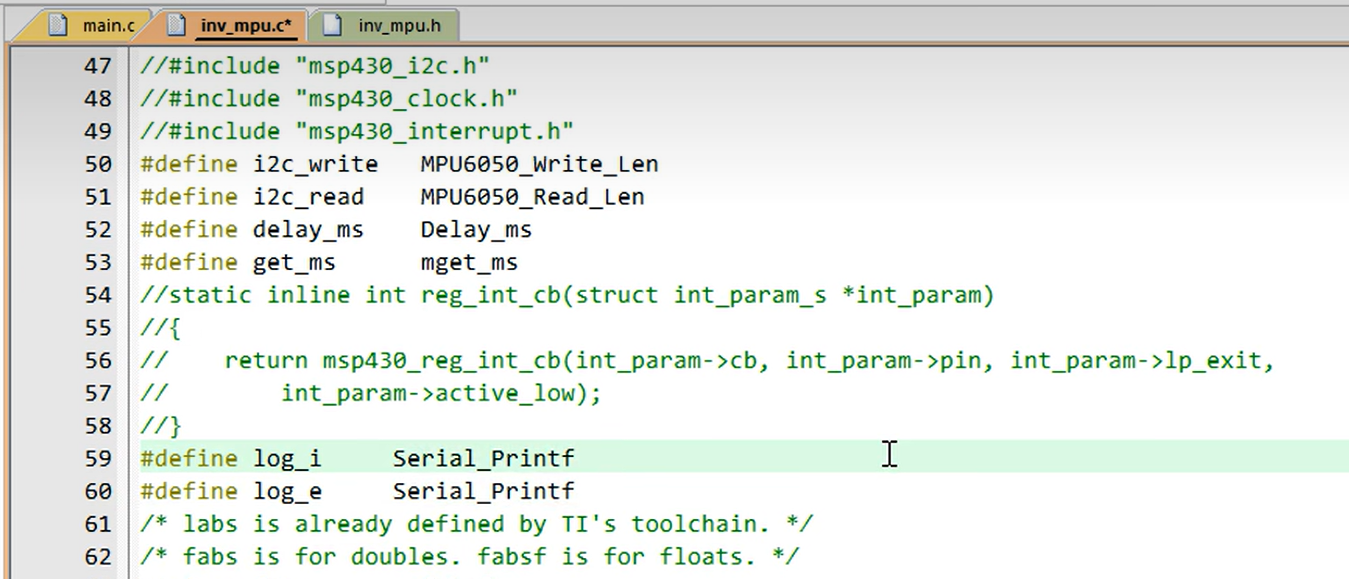
4、printf 换成自己的打印输出函数即可
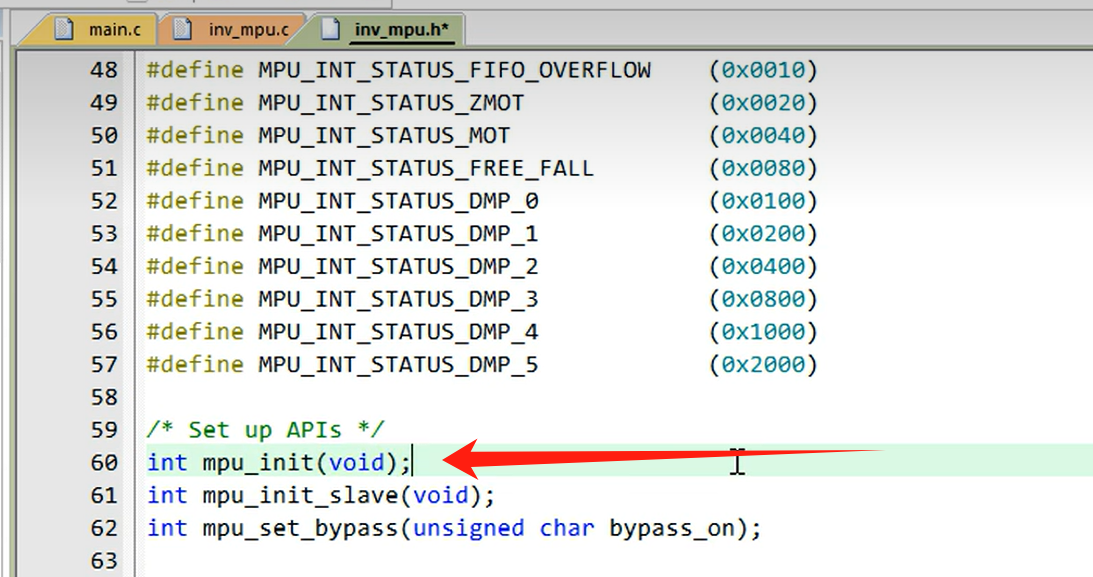
5、初始化函数修改 去掉形参
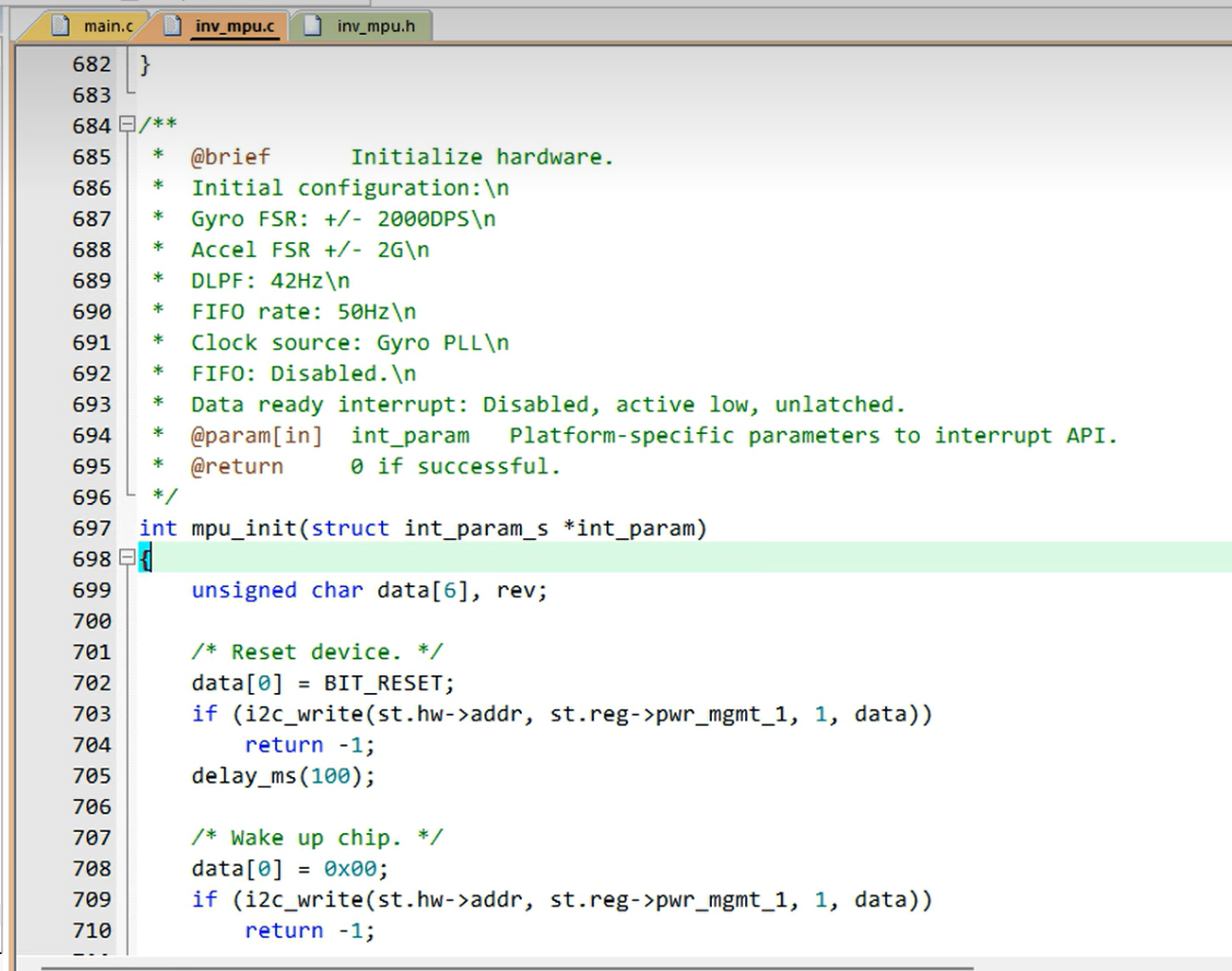
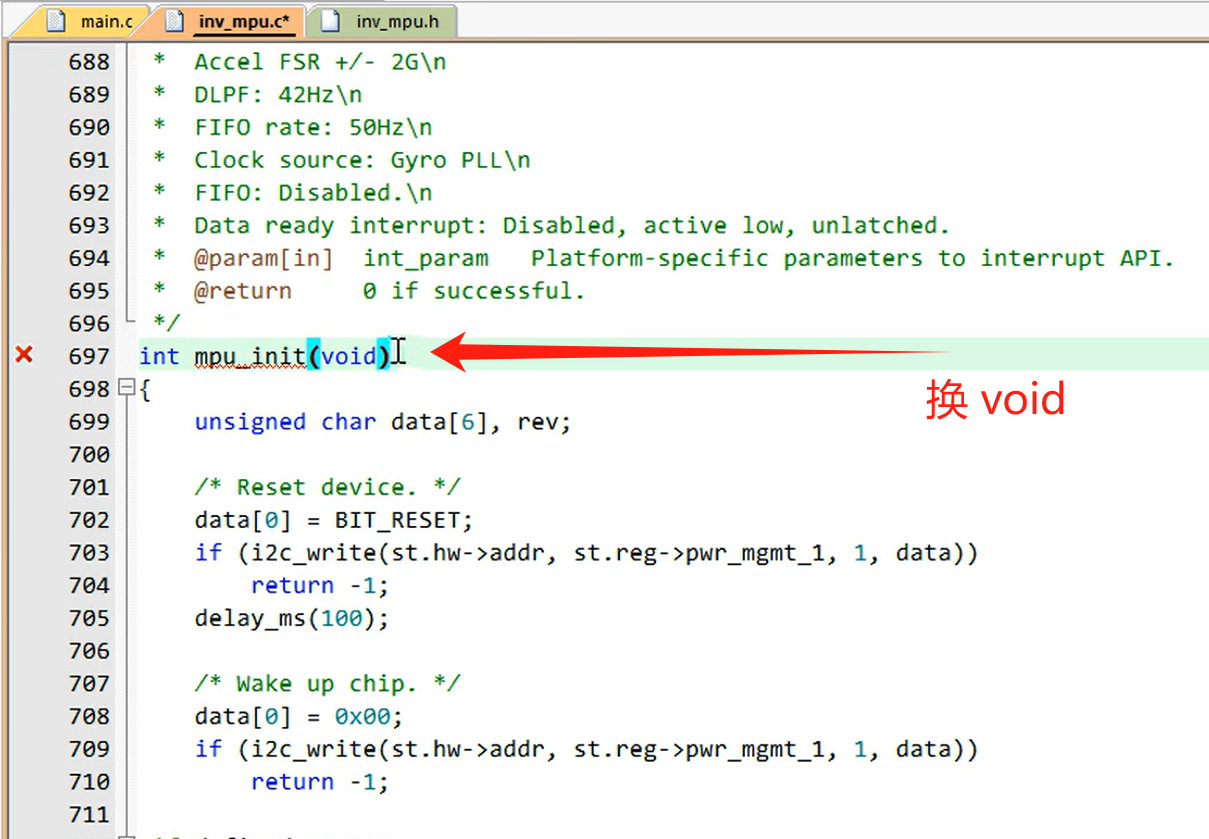
mpu_init头文件也记得修改
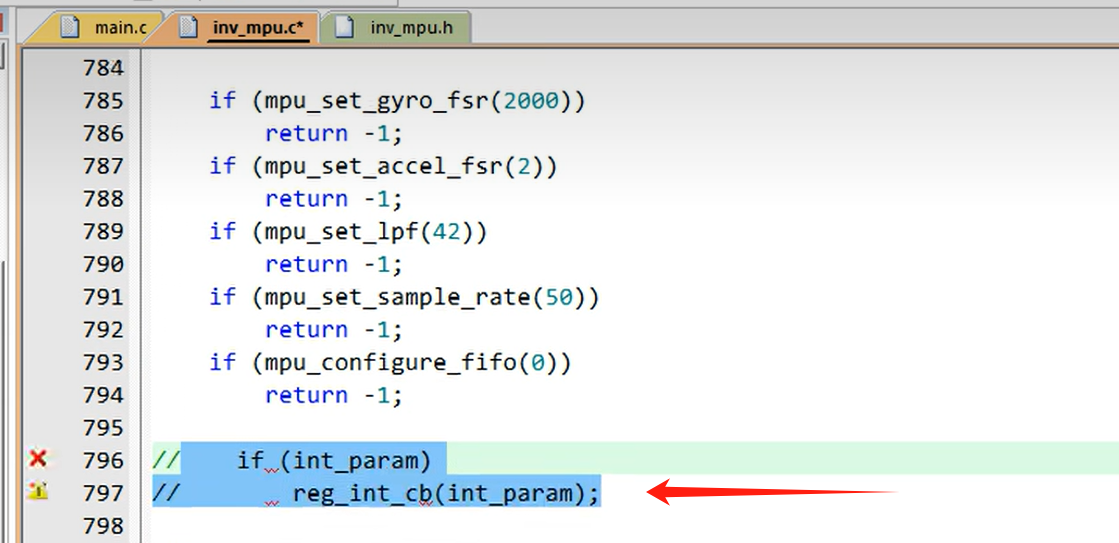
原函数中的这个报错注释掉
inv_mpu.h 修改
1、从inv_mpu.c复制定义过来
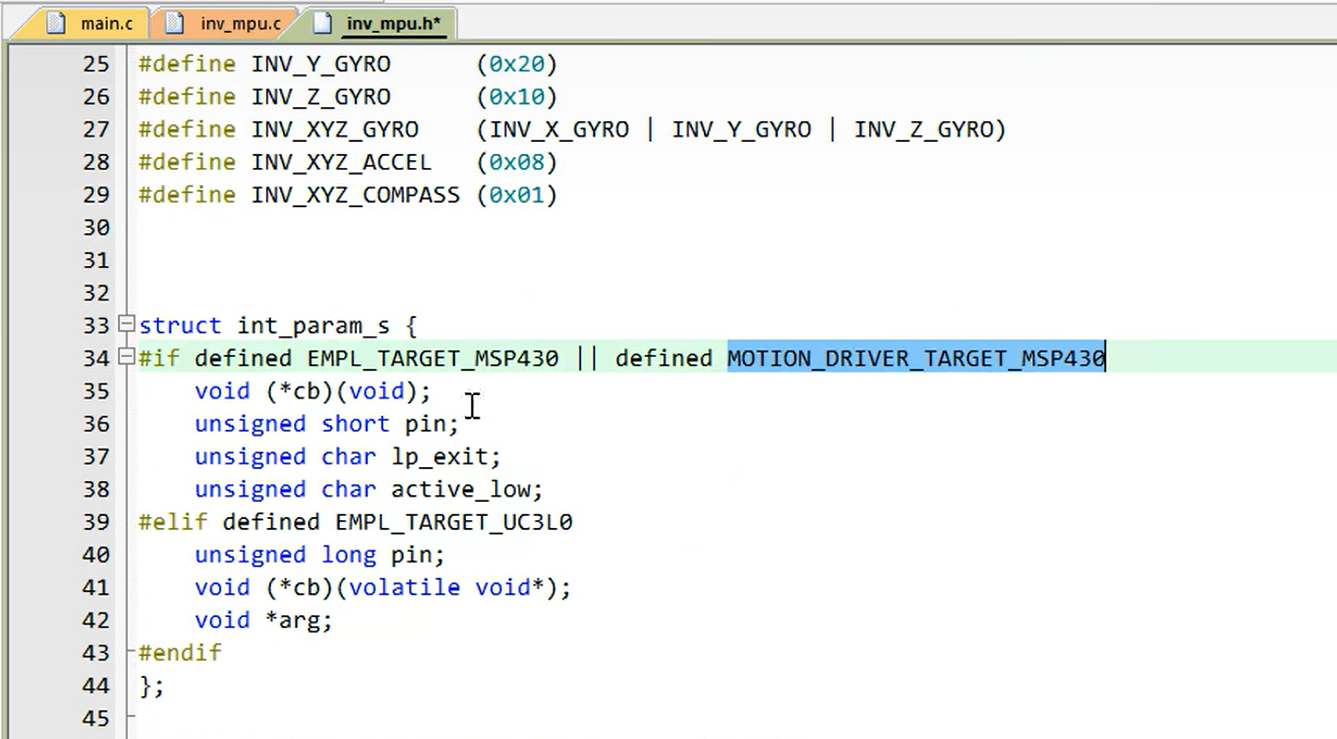
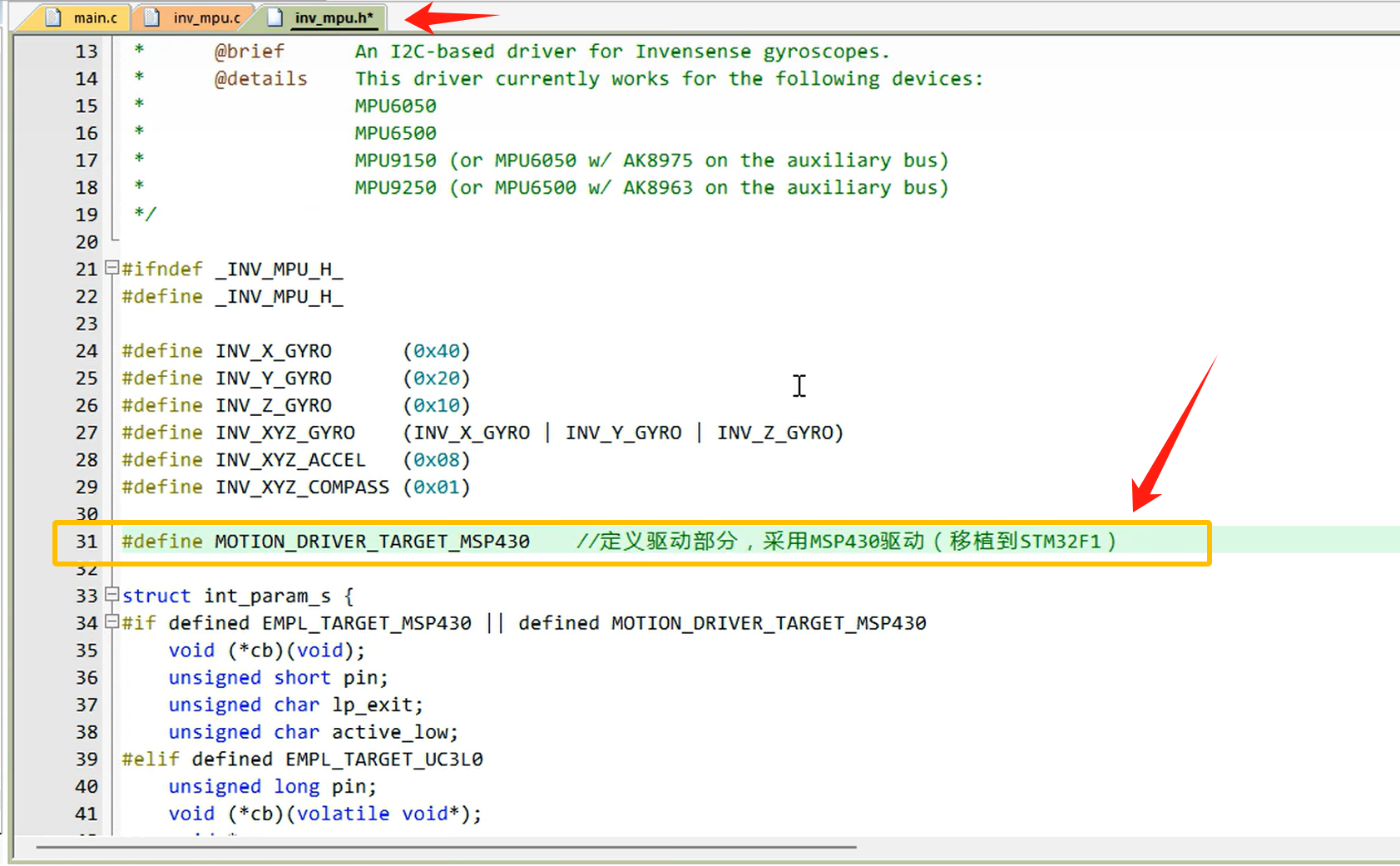
#define MOTION_DRIVER_TARGET_MSP430 //定义驱动部分,采用MSP430驱动(移植到STM32F1)
inv_mpu_dmp_motion_driver.c 和.h 修改
1、增加
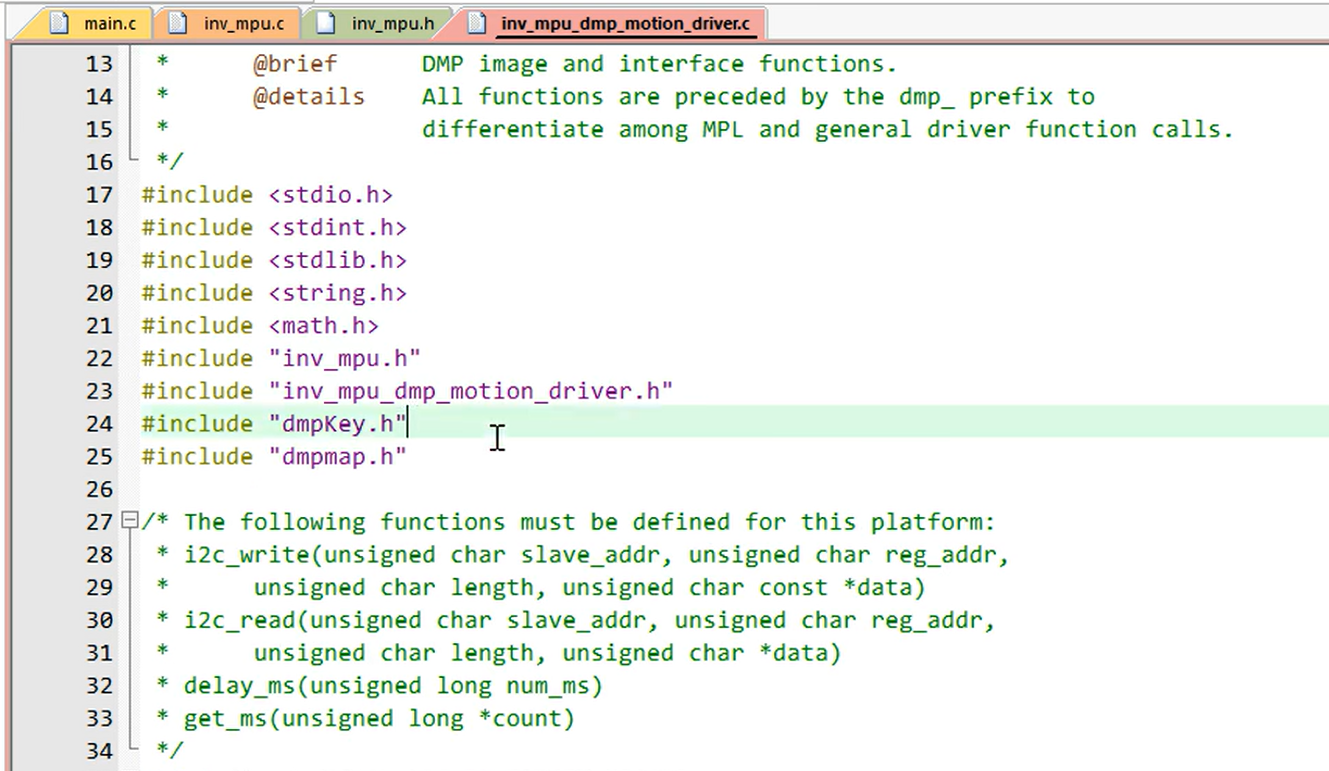
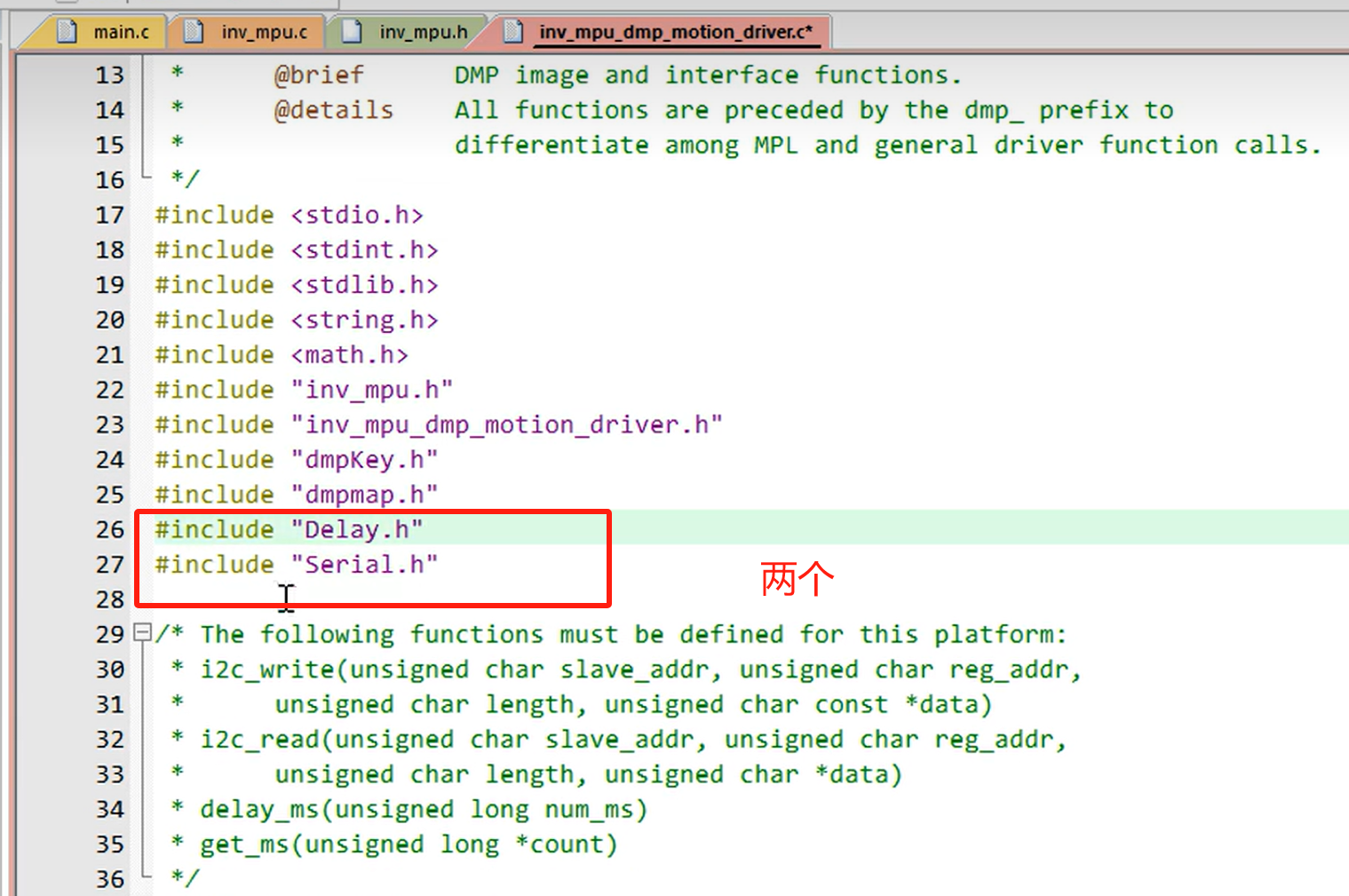
#include "Delay.h"
#include "stdio.h"2、注释和替换
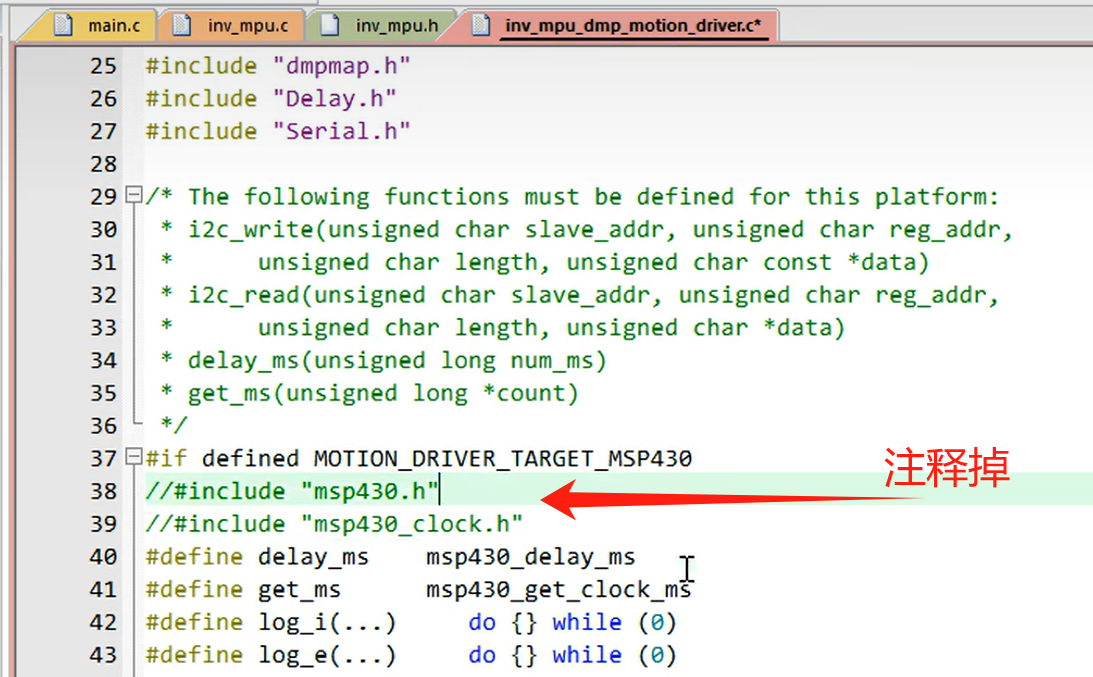

3、增加函数
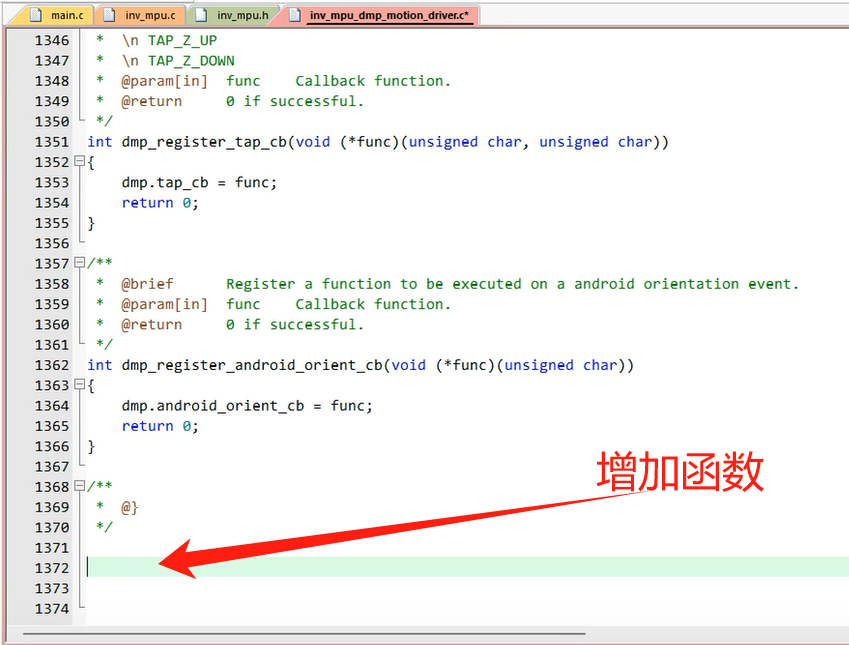
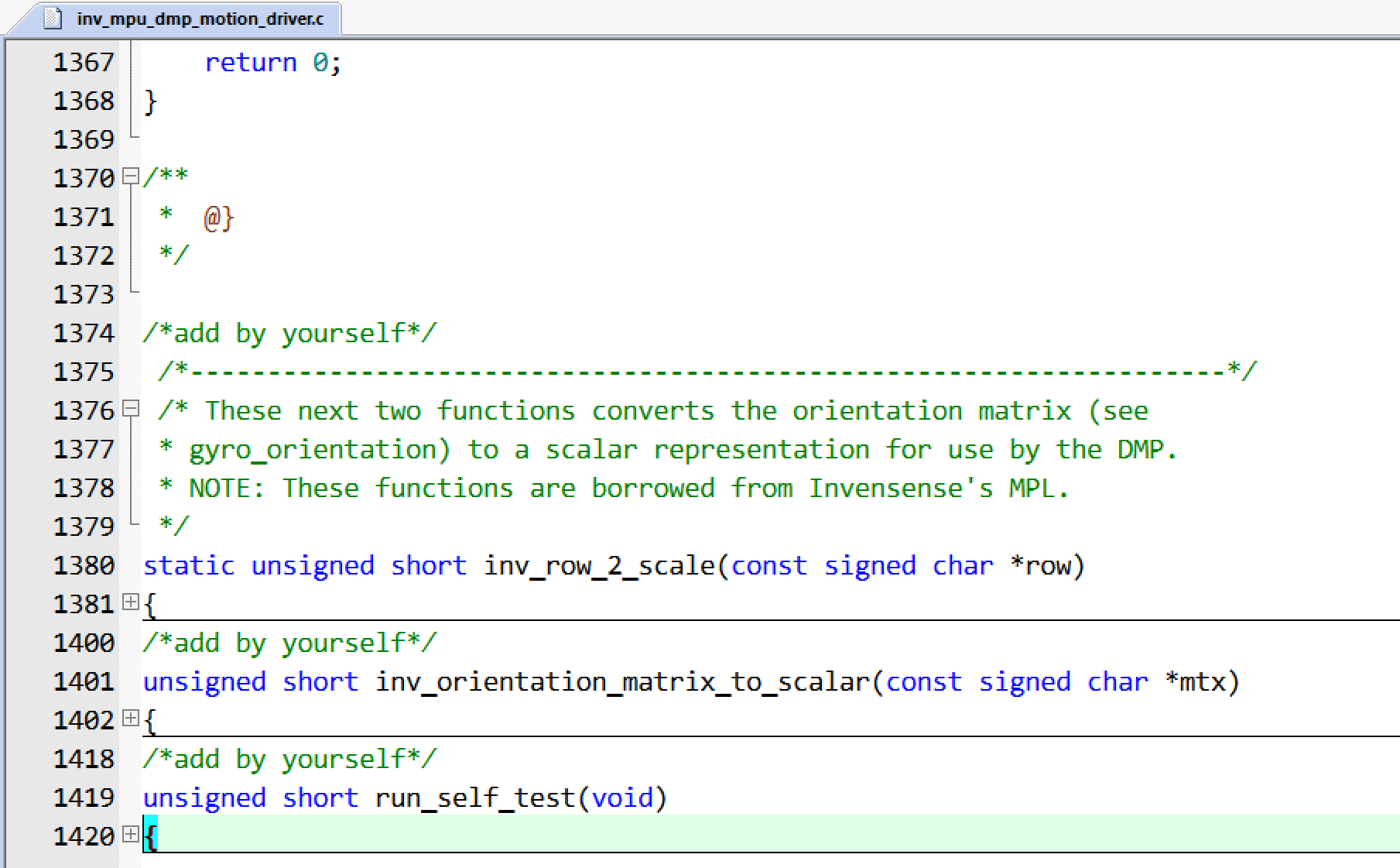
/*add by yourself*/
/*-------------------------------------------------------------------*/
/* These next two functions converts the orientation matrix (see
* gyro_orientation) to a scalar repre 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









