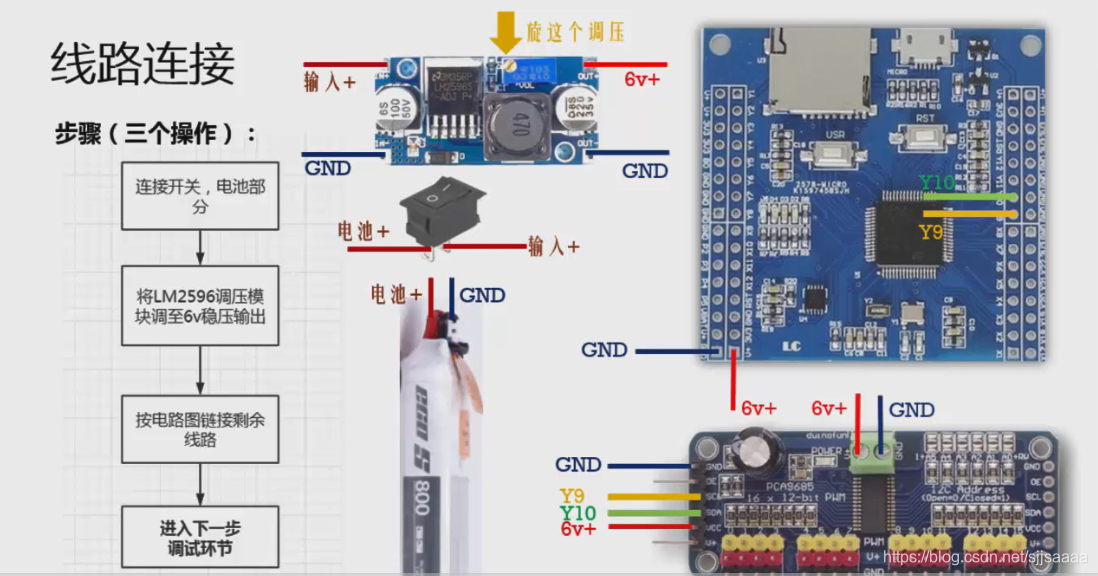
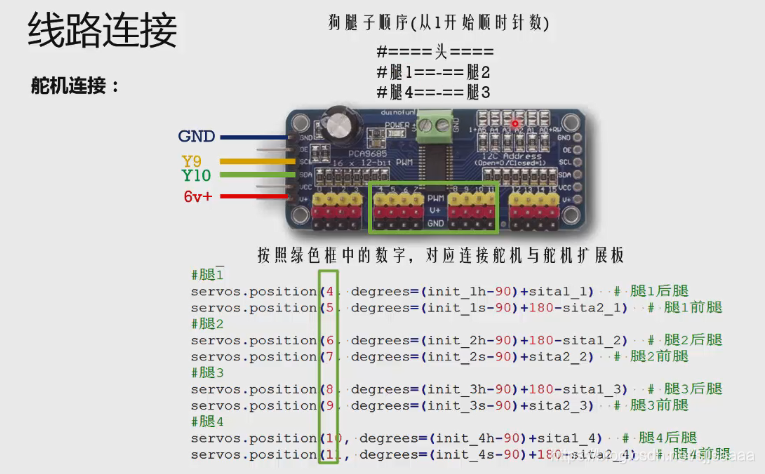
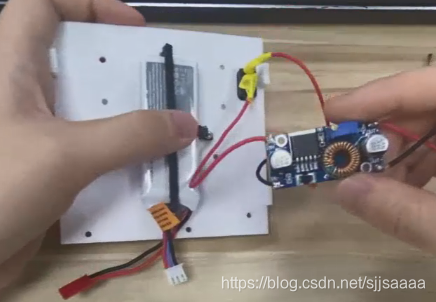
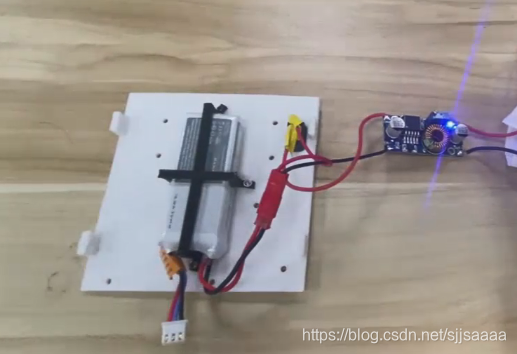
四足机器人的电路和控制思路 线路连接 步骤: 连接开关,电池部分。 将LM2596调压模块调至6V稳压输出 按照电路图连接剩余线路 测试环节 实际操作: 电池和电源模块。 接头接到开关上。 打开开关以后形态: 连接上以后打开开关注意模块后的两条线不能碰到一起,否则会短路。 用万用表,将旋钮调到20V,将黑色的放到模块的负极上,将红色的放到正极上。 读表。电压不对时








 本文详细介绍了斯坦福机器狗的电路连接步骤,包括电池、电源模块和开关的安装,以及LM2596调压模块的使用确保6V稳压输出。在连接过程中强调了避免短路的重要性,并展示了PyBOARD主控与舵机扩展版的接线方法。同时,文章提出了控制电路的基本思想,分为硬件和软件两部分。读者还可以通过提供的视频教程进一步学习。
本文详细介绍了斯坦福机器狗的电路连接步骤,包括电池、电源模块和开关的安装,以及LM2596调压模块的使用确保6V稳压输出。在连接过程中强调了避免短路的重要性,并展示了PyBOARD主控与舵机扩展版的接线方法。同时,文章提出了控制电路的基本思想,分为硬件和软件两部分。读者还可以通过提供的视频教程进一步学习。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








