








 超级会员免费看
超级会员免费看

 该博客详细介绍了SLAM中重投影误差e关于相机位姿扰动量δξ的雅克比矩阵J的公式推导,包括公式介绍、推导过程和G2O库中的部分代码实现。讨论了相机坐标系下3D点的投影、误差表示及最小二乘优化中雅克比矩阵的计算方法。
该博客详细介绍了SLAM中重投影误差e关于相机位姿扰动量δξ的雅克比矩阵J的公式推导,包括公式介绍、推导过程和G2O库中的部分代码实现。讨论了相机坐标系下3D点的投影、误差表示及最小二乘优化中雅克比矩阵的计算方法。
目录
1. 推导的公式是什么
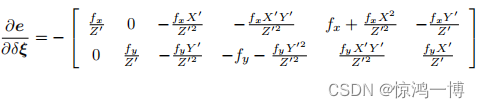
在SLAM中,为了使用重投影误差 e 对相机的位姿 ξ (李代表示形式)进行优化,需要求重投影误差e关于相机位姿扰动量δξ (本文使用左乘扰动,参考SLAM十四讲7.7.3节)的雅克比矩阵J = ![]() 。该公式在代码中(如G2O中)进行相机位姿的优化求解。
。该公式在代码中(如G2O中)进行相机位姿的优化求解。
结果如下,其中 表示相机坐标系下的三维坐标点。
目录
在SLAM中,为了使用重投影误差 e 对相机的位姿 ξ (李代表示形式)进行优化,需要求重投影误差e关于相机位姿扰动量δξ (本文使用左乘扰动,参考SLAM十四讲7.7.3节)的雅克比矩阵J = ![]() 。该公式在代码中(如G2O中)进行相机位姿的优化求解。
。该公式在代码中(如G2O中)进行相机位姿的优化求解。
结果如下,其中 表示相机坐标系下的三维坐标点。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























