









一、项目简介
使用基于RT-thread操作系统的AB32VG1开发板作为主控,对ov7670摄像头进行图像采集,并使用串口发送图片RGB565格式到PC供opencv进行图像识别。 原项目设想在开发板上进行采集的同时并通过简单的二值算法和插值算法实现车牌号识别,但实践中发现开发板的ram并不够保存采集回来的图像信息,与数据手册中介绍的192k有一定差距,实现用户能使用的ram是70k;同时原设想是带lcd屏幕的,但最后发觉io口数量不够,只能通过串口调试显示,但lcd屏幕的 spi代码仍保留在原码中,可供参考。 目前开发板通过摄像头采集完整数据部分已经完成,并且可以通过串口uart1发送到上位机进行图像显示。
二、硬件说明
1.摄像头ov7670带fifo:采用csi总线的普通30w摄像头。考虑到用模拟读取摄像头,io的反转速度可能不能满足高速采集的需要,因此保险起见,直接使用带fifo的摄像头。sccb总线采用全模拟的方式,跳过了所有中间层,直接操作寄存器,提高了总线的时钟。

2.串口工具PL2302(ttl转RS232),一款与pc通讯的串口工具,免驱。

3.总接线图
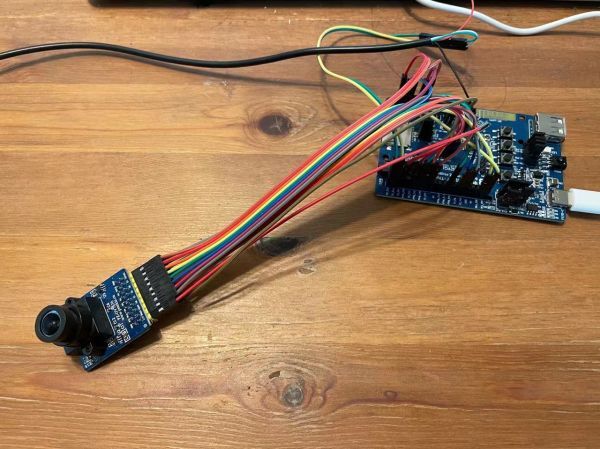
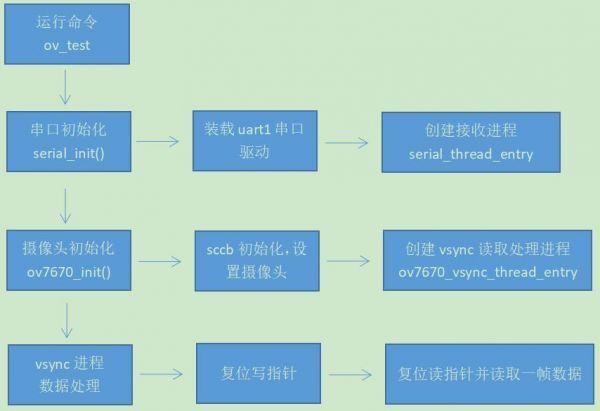
三、软件说明
1.软件流程图
2.关键代码
/* 摄像头IO口采用直接操作寄存器的方式实现,极大提升io速度 */
#define BSP_FIFO_RCK_PIN "PA.5"
#define BSP_FIFO_RCK_SET_LOW (GPIOA_BASE[GPIOx] &= ~(1ul << 5))
#define BSP_FIFO_RCK_SET_HIGH (GPIOA_BASE[GPIOx] |= (1ul << 5))
/* sccb总线的初始化并设置ov7670相应寄存器 */
sccb_init();
if(sccb_write_reg(0x12, 0x80) == RT_FALSE){
return RT_FALSE;
}
rt_thread_delay(50);
id1 = sccb_read_reg(0x0b);
id2 = sccb_read_reg(0x0a);
rt_kprintf("id1 = 0x%02x, id2 = 0x%02xn", id1, id2);
for(rt_uint16_t i = 0;i < sizeof(ov7670_init_reg_tbl) / sizeof(ov7670_init_reg_tbl[0]);i++){
sccb_write_reg(ov7670_init_reg_tbl[0], ov7670_init_reg_tbl[1]);
}
/* 开启摄像头vsync扫描线程(没有外部中断因此改用轮询的方式实现) */
rt_thread_t thread;
/* 查询VSYNC线程 */
thread = rt_thread_create("ov7670_vsync", ov7670_vsync_thread_entry, RT_NULL, 1024, 5, 100);
if (thread == RT_NULL){
rt_kprintf("ov7670_vsync thread create fail!n");
return RT_FALSE;
}
/* 启动线程 */
rt_thread_startup(thread);
/* 提取hal库实现了uart的数据发送函数 */
void uart1_send(rt_uint8_t *pbuf, rt_uint32_t len)
{
for(rt_uint32_t i = 0;i < len;i++){
hal_uart_clrflag(UART1_BASE, UART_FLAG_TXPND);
hal_uart_write(UART1_BASE, pbuf);
while(hal_uart_getflag(UART1_BASE, UART_FLAG_TXPND) == 0);
}
}
/* LCD底层驱动代码,因为引脚不够,所以无法演示,测试可用,另外程序里也配有寄存器版本的操作代码 */
static rt_uint32_t spi_bit_xfer(struct rt_spi_device *device, struct rt_spi_message *message)
{
struct rt_spi_bit_ops *ops = (struct rt_spi_bit_ops *)device->user_data;
rt_uint8_t tmp_buf[1024];
rt_memset(tmp_buf, 0, sizeof(tmp_buf));
if(message->send_buf == RT_NULL){
message->send_buf = tmp_buf;
}else if(message->recv_buf == RT_NULL){
message->recv_buf = tmp_buf;
}else{
return RT_FALSE;
}
if (message->cs_take){
ops->set_cs(ops->data, PIN_LOW);
}
#ifdef SPI_DC
message->length & SPI_DC ? ops->set_dc(ops->data, PIN_HIGH) : ops->set_dc(ops->data, PIN_LOW);
message->length &= ~SPI_DC; /* 复原消息长度 */
// rt_kprintf("message->length = %dn", message->length);
#endif
spi_rw_bytes(device, (rt_uint8_t *)message->send_buf, (rt_uint8_t *)message->recv_buf, message->length);
if (message->cs_release){
ops->set_cs(ops->data, PIN_HIGH);
}
}
static const struct rt_spi_ops spi_bit_bus_ops ={
RT_NULL,
spi_bit_xfer
};
优化思路: 1. 由于ab32vg1没有外部中断可以使用,ov7670的帧同步信号vsync只有500us的高电平时间,因此为了捕捉到该信号,vsync线程一直占用很多的资源; 2. 串口与上位通讯的速度目前最快只有115200bps,上位机可以接受256000bps的速度,但将驱动改为256000bps后,接收会出现乱码,因此串口使用的图片数据非常缓慢。
四、项目演示



















 1601
1601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











