




读完本篇文章你的收获:
-
PID三个参数基本概念
-
了解如何调节PID
-
认识一个钻研技术的博主
先上效果图:
一、什么是PID
在工程中,如果我们要用单片机做一个温控系统,其系统组成一般如下:一个采集温度的ADC,一个输出温度的加热头以及一个用于运行控制算法的单片机,如果我们要维持温度为100度,在不加任何控制算法的情况下,我们可以通过简单的阈值判断法来控制温度,一个if判断语句,当采集到的温度大于100时,单片机控制加热头关闭,当采集的温度小于100度时,单片机则控制加热头开启,简单粗暴,但这样的控制方法,最终所展示出来的温度曲线是极其不稳定的,他会由于控制器件的灵敏程度、加热头的性能等等原因,导致最终的温度曲线会在目标周围震荡,达不到理想的控制效果,就像下图:实际曲线(黑线) 在 目标曲线(红线) 周围抖动
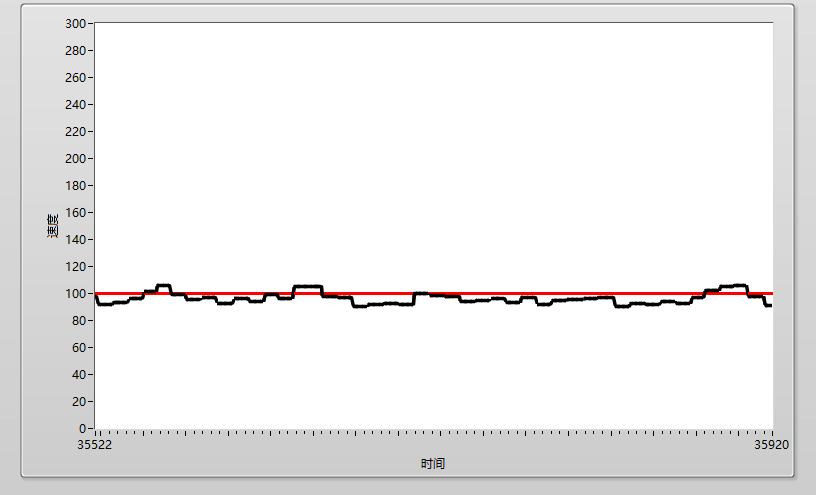
那如何才能维持实际曲线与目标曲线贴合,达到一个稳定的控制效果呢?
这里就引入了PID控制算法的概念,PID是 Proportion Integration Differentiation 的缩写,实际上他就是一个公式,由比例项(Proportion ),积分项(Integration ),微分项(
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











