




前言
在ROS系统中,无论话题还是服务,或者我们后续将要学习的动作,都会用到一个重要的概念——通信接口。
通信并不是一个人自言自语,而是两个甚至更多个人,你来我往的交流,交流的内容是什么呢?为了让大家都好理解,我们可以给传递的数据定义一个标准的结构,这就是通信接口。
接口的定义
接口的概念在各个领域随处可见,无论是硬件结构还是软件开发,都有广泛的应用。

比如生活中最为常见的插头和插座,两者必须匹配才能使用,电脑和手机上的USB接口也是,什么Micro-USB、TypeC等等,都是关于接口的具体定义。

软件开发中,接口的使用就更多了,比如我们在编写程序时,使用的函数和函数的输入输出也称之为接口,每一次调用函数的时候,就像是把主程序和调用函数通过这个接口连接到一起,系统才能正常工作。
更为形象的是图形化编程中使用的程序模块,每一个模块都有固定的结构和形状,只有两个模块相互匹配,才能在一起工作,这就很好的讲代码形象化了。
所以什么是接口,它是一种相互关系,只有彼此匹配,才能建立连接。
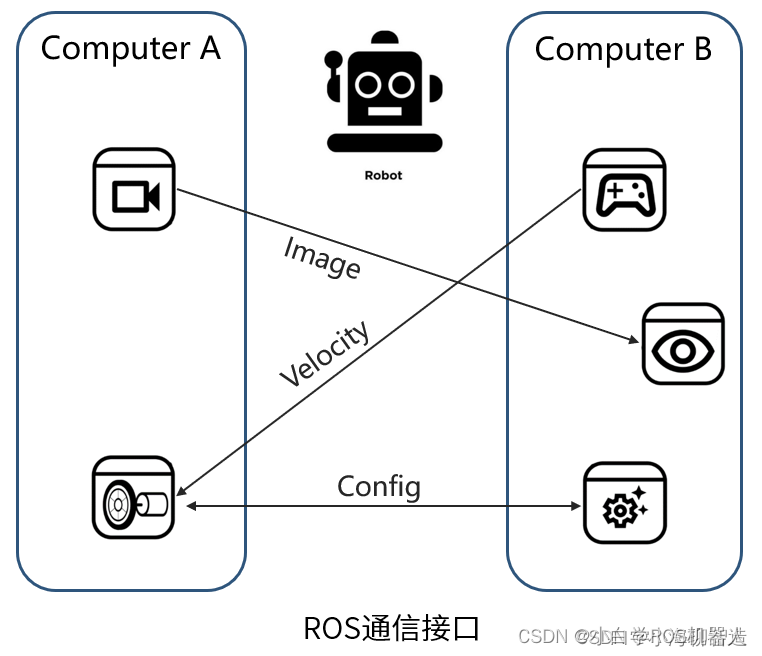
回到ROS的通信系统,它的主要目的就是传输数据,那就得让大家高效的建立连接,并且准确包装和解析传输的数据内容,话题、服务等机制也就诞生了,他们传输的数据,都要符合通信接口的标准定义。
比如摄像头驱动发布的图像话题,由每个像素点的R、G、B三原色值组成,控制机器人运动的速度指令,由线速度和角速度组成,进行机器人配置的服务,有配置的参数和反馈的结果组成等等,类似这些常用的定义,在ROS系统中都有提供,我们也可以自己开发。
这些接口看上去像是给我们加了一些约束,但却是ROS系统的精髓所在。举
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 324
324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









