




 本文围绕机器人建模与仿真展开,介绍了urdf模型结合rviz可视化的操作,包括创建功能包、编写urdf和launch文件、图形化显示等;还阐述了gazebo绘制地图的步骤,如创建工作空间、绘制墙壁、保存地图文件,以及配置xacro小车模型文件和ROS运行环境。
本文围绕机器人建模与仿真展开,介绍了urdf模型结合rviz可视化的操作,包括创建功能包、编写urdf和launch文件、图形化显示等;还阐述了gazebo绘制地图的步骤,如创建工作空间、绘制墙壁、保存地图文件,以及配置xacro小车模型文件和ROS运行环境。
一、urdf模型+rviz可视化
创建功能包,添加依赖。用的是Ubantu 20.04
cd catkin_ws #进入工作空间
catkin_create_pkg jubot_demo urdf xacro #创建功能包、添加依赖
cd jubot_demo/
mkdir urdf
mkdir launch
mkdir meshes #存放渲染机器人模型的文件
mkdir config #存放rviz配置的文件
新建两个文档,jubot_base.urdf(放urdf文件夹下)
display_jubot_base_urdf.launch(放launch文件夹下)
config里的rviz文件是保存生成的,不用写
1. urdf文件
Unified Robot Description Format,统一机器人描述格式,简称为URDF

上图展示了模型的环节(link)与关节(joint)坐标关系,在基础模型之上,我们为机器人添加尺寸大小。由于每个环节的参考系都位于该环节的底部,关节也是如此,所以在表示尺寸大小时,只需要描述其相对于连接的关节的相对位置关系即可。URDF中的 origin 域就是用来表示这种相对关系。
如果我们为机器人的关节添加 axis 旋转轴参数,那么该机器人模型就可以具备基本的运动学参数。
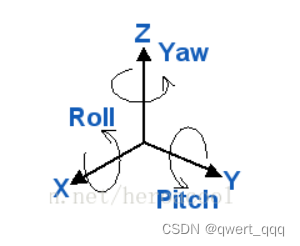
关于参数欧拉角rpy,是roll(滚转角)、pitch(俯仰角)、yaw(偏航角),分别对应绕x轴、y轴、z轴
<?xml version="1.0" ?>
<robot name="jubot">
<!--base_car-->>
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.20" length="0.16"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<!--left_wheel-->>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0.0 0.19 -0.05" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.5707 0.0 0.0"/>
<geometry>
<cylinder radius="0.06" length="0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<!--right_wheel-->>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0.0 -0.19 -0.05"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.5707 0.0 0.0"/>
<geometry>
<cylinder radius="0.06" length="0.025"/>
</geometry>
<material name="white">
<color rgba="1 1.0 1.0 0.9"/>
</material>
</visual>
</link>
<!--front_caster-->
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0.0 -0.095" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.95"/>
</material>
</visual>
</link>
<!--back_caster-->
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0.0 -0.095" rpy="0.0 0.0 0.0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.95"/>
</material>
</visual>
</link>
</robot>
2. launch文件
<launch>
<!-- 设置机器人模型路径参数 -->
<param name="robot_description" textfile="$(find jubot_demo)/urdf/jubot_base.urdf" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3091
3091

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









