




ISBNet/docs/TRAIN.md at master · VinAIResearch/ISBNet
一、准备数据集
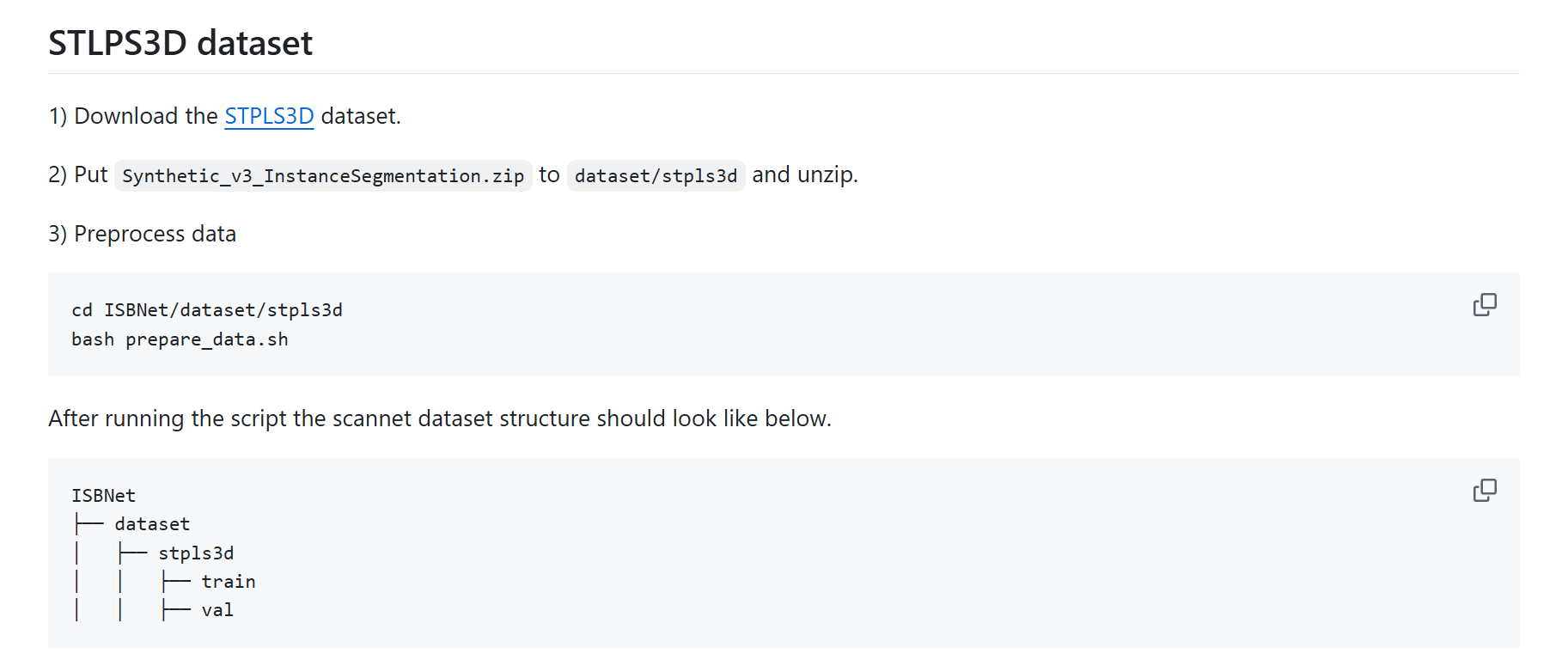
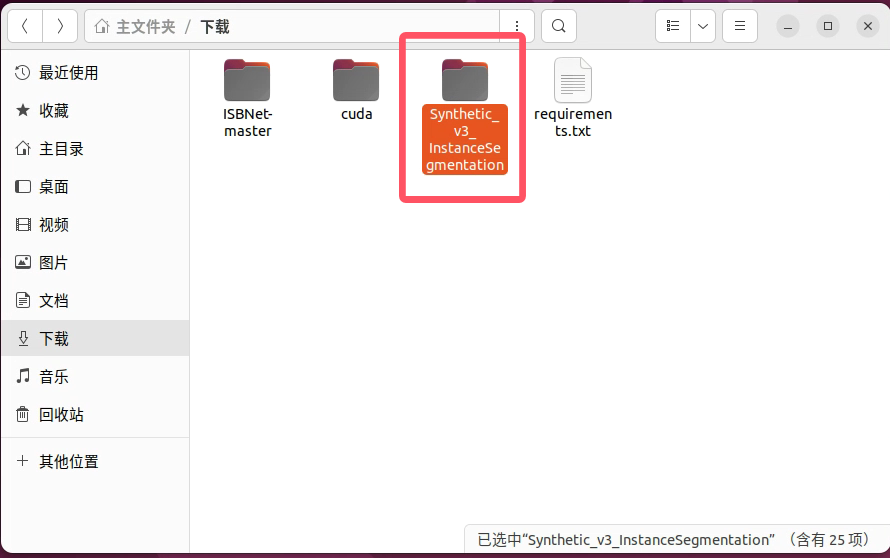
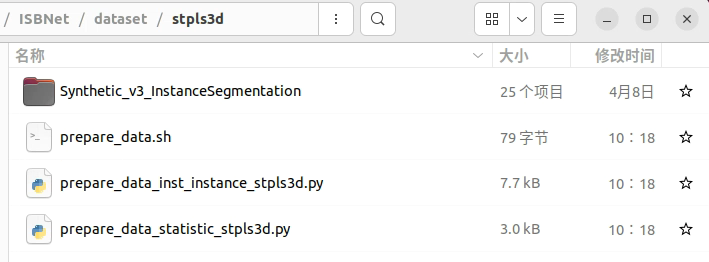
先是下载实例分割的数据集,复制到dataset的stpls3d文件夹里面
先是激活isbnet环境
conda activate isbnet然后进入isbnet内的数据集文件夹,然后执行数据准备的脚本
cd ISBNet/dataset/stpls3d
bash prepare_data.sh
运行完之后
二、开始训练
# Pretrain step
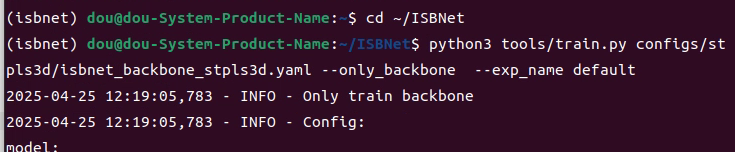
python3 tools/train.py configs/stpls3d/isbnet_backbone_stpls3d.yaml --only_backbone --exp_name default
# Train entire model
python3 tools/train.py configs/stpls3d/isbnet_stpls3d.yaml --trainall --exp_name default运行第一个命令后
显示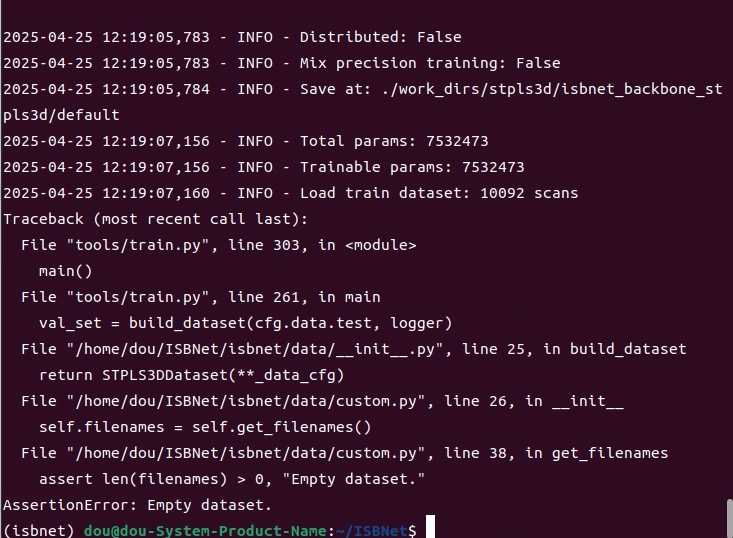
问题出在configs/stpls3d/isbnet_backbone_stpls3d.yaml 中的验证集配置,按照文件夹里面命名修改,然后保存
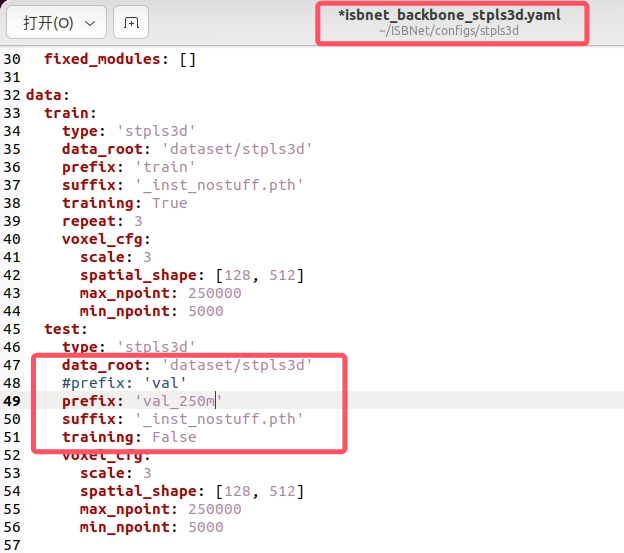
保存后再开始执行ISBNet的训练。
三、训练过程
ISBNet所给的stpls3d训练代码如下
# Pretrain step
python3 tools/train.py configs/stpls3d/isbnet_backbone_stpls3d.yaml --only_backbone --exp_name default
# Train entire model
python3 tools/train.py configs/stpls3d/isbnet_stpls3d.yaml --trainall --exp_name default上面两个训练命令代表了ISBNet模型训练的两个关键阶段,它们的区别类似于“先学基础再学专业”的过程。一下是通俗易懂的对比说明:



四、第一阶段:骨干网络预训练(仅训练骨干)显示如下
(isbnet) dou@dou-System-Product-Name:~/ISBNet$ python3 tools/train.py configs/stpls3d/isbnet_backbone_stpls3d.yaml --only_backbone --exp_name default
2025-04-25 12:54:08,791 - INFO - Only train backbone
2025-04-25 12:54:08,791 - INFO - Config:
model:
channels: 16
num_blocks: 7
semantic_classes: 15
instance_classes: 14
sem2ins_classes: []
semantic_only: False
semantic_weight: [1.0, 1.0, 44.0, 21.9, 1.8, 25.1, 31.5, 21.8, 24.0, 54.4, 114.4, 81.2, 43.6, 9.7, 22.4]
with_coords: False
ignore_label: -100
voxel_scale: 3
use_spp_pool: False
filter_bg_thresh: 0.1
iterative_sampling: False
instance_head_cfg:
dec_dim: 64
n_sample_pa1: 2048
n_queries: 256
radius_scale: 10
radius: 0.4
neighbor: 16
test_cfg:
x4_split: False
logit_thresh: 0.0
score_thresh: 0.2
npoint_thresh: 10
type_nms: 'matrix'
topk: 100
fixed_modules: []
data:
train:
type: 'stpls3d'
data_root: 'dataset/stpls3d'
prefix: 'train'
suffix: '_inst_nostuff.pth'
training: True
repeat: 3
voxel_cfg:
scale: 3
spatial_shape: [128, 512]
max_npoint: 250000
min_npoint: 5000
test:
type: 'stpls3d'
data_root: 'dataset/stpls3d'
#prefix: 'val'
prefix: 'val_250m'
suffix: '_inst_nostuff.pth'
training: False
voxel_c 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 916
916

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









