






https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/main/README_CN.md
资源中心 - RoboSense速腾聚创 | 让世界更安全,让生活更智能

本人ubuntu20.04,关于雷达的依赖以及驱动都在官网有说了
先访问官网下载资料,还有github去了解相关代码,之后用网线连接电脑和雷达配置网络
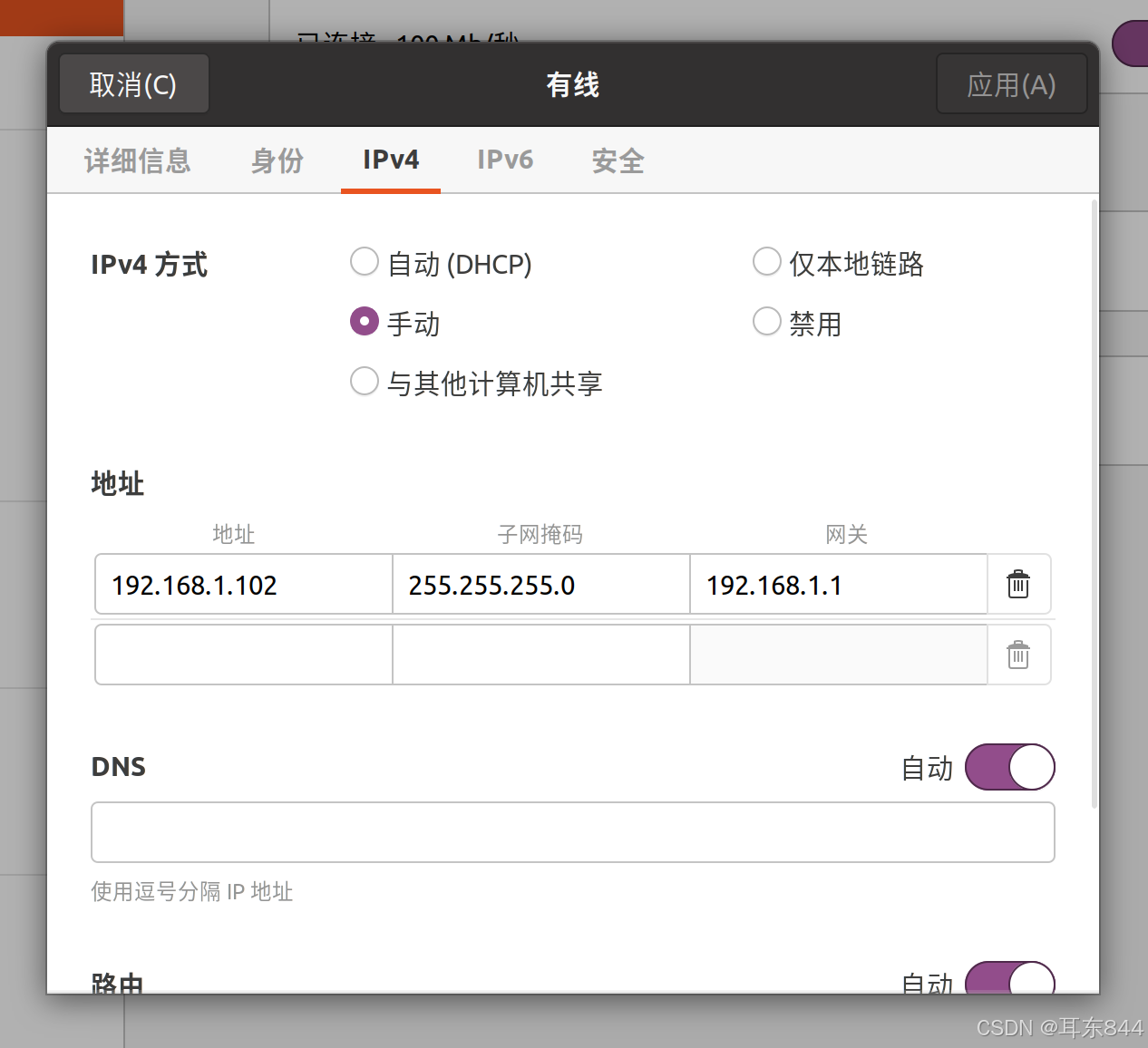
这里配置的其实是电脑的ip,只需要和我的图一样就可以了,雷达的ip口默认192.168.1.200,之后是按照官网下载并部署到工作空间,大致如图
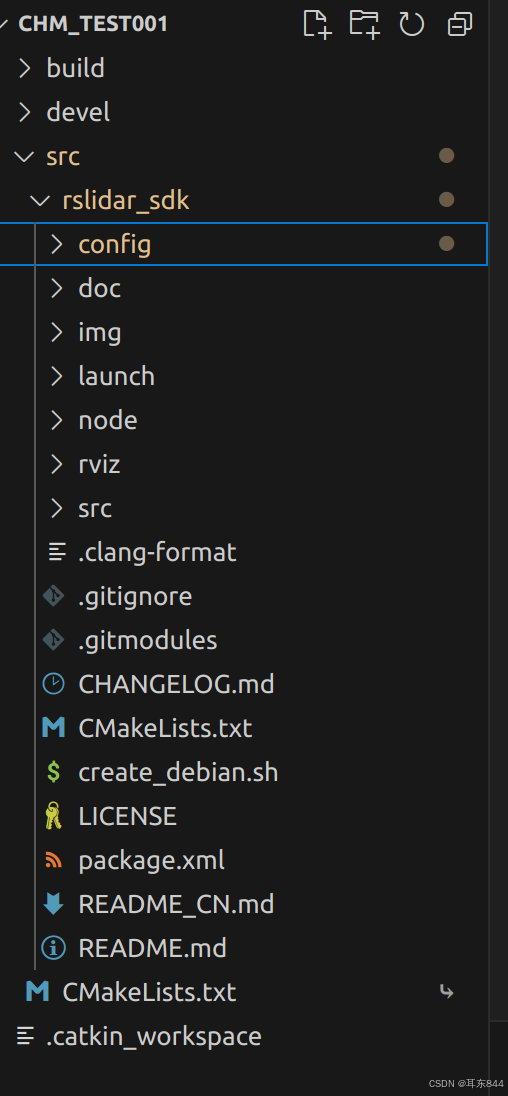
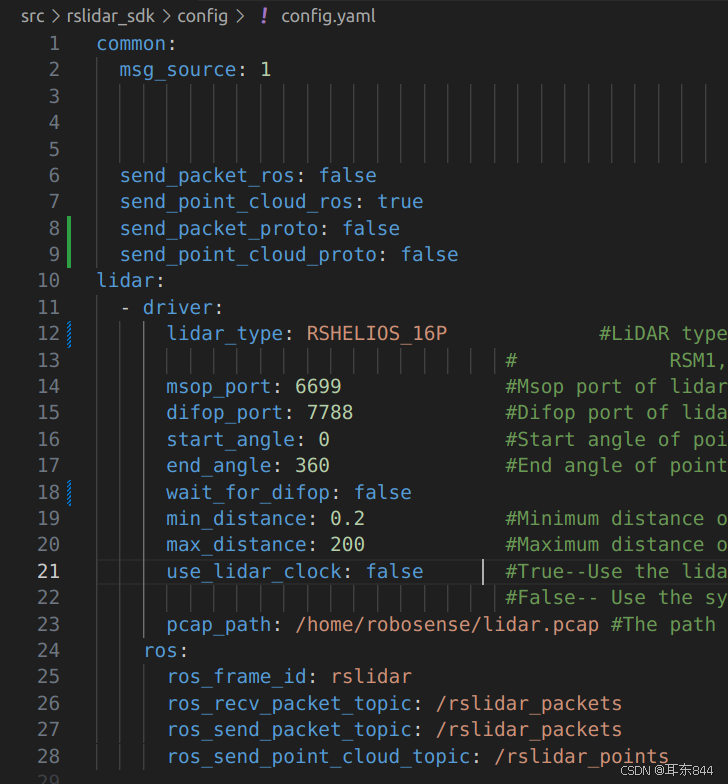
雷达的sdk放入工作空间之后要先修改config文件夹下的yaml文件,如图
之后在终端编译
catkin_make source devel/setup.bash roslaunch rslidar_sdk start.launch
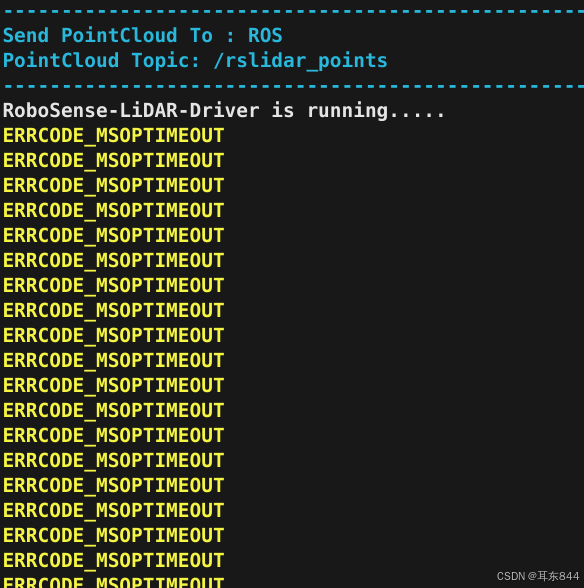
这样就可以在rviz中看到点云图了,报错可以等一会儿,因为difog端口加载比较慢,要是一直报错,注意第18行的代码为false,并且注意雷达型号是不是填错了,可以每一个都修改之后跑一次,穷举法确定自己的雷达型号。因为我一开始就错把自己的认为是RS16,结果废了半天劲。
报错如图


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









