






一,
1.读取一张彩色图像并将其转换为灰度图。
# 读取一张彩色图像并将其转换为灰度图。
import cv2
image = cv2.imread("./lena.png")
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
cv2.imshow("image", image)
cv2.imshow("image_gray", image_gray)
cv2.waitKey(0)
二 ,
题目1:二值化与形态学操作
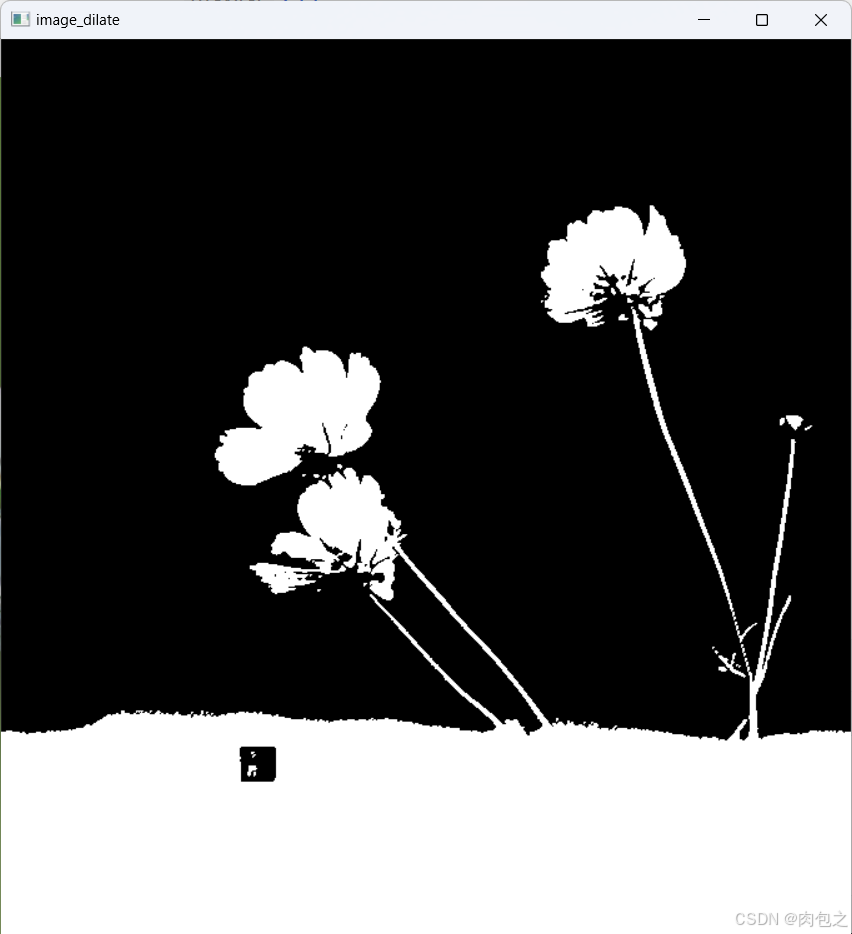
编写程序,读取一张彩色图像【flower.png】,将其转换为灰度图,然后进行二值化处理。
接着,对二值化后的图像执行腐蚀和膨胀操作,并显示处理前后的图像。
import cv2
image = cv2.imread("./flower.png")
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
_, image_binary = cv2.threshold(image_gray,
127,
255,
cv2.THRESH_BINARY+cv2.THRESH_OTSU
)
M = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (2, 2))
image_erode = cv2.erode(image_binary, M)
image_dilate = cv2.dilate(image_erode, M)
cv2.imshow("image", image)
cv2.imshow("image_dilate", image_dilate)
cv2.waitKey(0)
题目2:图像变换与颜色识别
编写程序,读取一张彩色图像,执行以下操作:
- 将图像缩放至指定大小(例如,宽度和高度都缩小为原来的一半)。
- 对缩放后的图像应用仿射变换,实现图像的旋转(例如,旋转45度)。
- 将图像从BGR颜色空间转换为HSV颜色空间,并提取出特定的颜色范围(例如,提取黄色区域)。
- 显示处理后的图像,并在图像上标记出识别到的颜色区域。
import cv2
import numpy as np
image = cv2.imread("./threeColor.jpg")
image_resize = cv2.resize(image, dsize=None, fx = 0.5, fy= 0.5)
cv2.imshow("image_resize", image_resize)
M = cv2.getRotationMatrix2D((image.shape[0]/2, image.shape[1]/2), 45, 1)
image_warp = cv2.warpAffine(image,
M,
(image.shape[1], image.shape[0]),
flags=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_TRANSPARENT)
cv2.imshow("image_warp", image_warp)
image_HSV = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
image_low = np.array([26, 43, 46])
image_high = np.array([34, 255, 255])
image_mark = cv2.inRange(image_HSV, image_low, image_high)
image_b = cv2.bitwise_and(image,image, mask = image_mark)
cv2.imshow("image_b", image_b)
cv2.waitKey(0) 

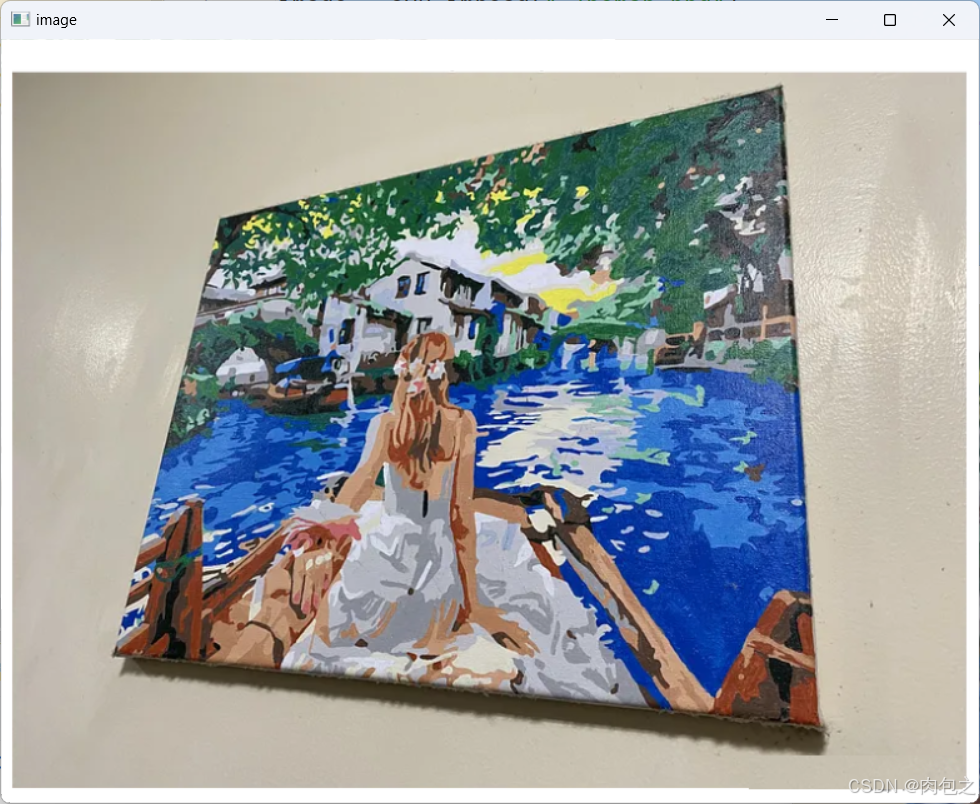
题目3:图像矫正
编写程序,读取一张彩色图像,执行以下操作
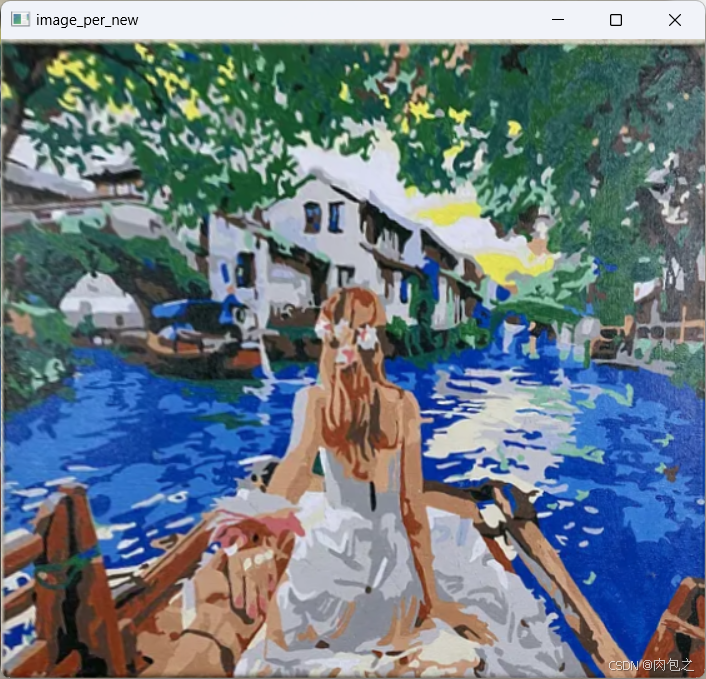
- 1.找到原图 和目标图的四个点,获取透视变换矩阵
- 对图像应用透视变换,实现油画区域的矫正
import cv2
import numpy as np
# 加载图片
image = cv2.imread("./heman.png")
# 原始四个顶点坐标(需根据实际图像调整)
points1 = np.float32([[175, 142], [621, 35], [89, 491], [652, 546]])
# 定义目标矩形的四个点
points2 = np.float32([[min(points1[:, 0]), min(points1[:, 1])],
[max(points1[:, 0]), min(points1[:, 1])],
[min(points1[:, 0]), max(points1[:, 1])],
[max(points1[:, 0]), max(points1[:, 1])]])
# 计算透视变换矩阵
M = cv2.getPerspectiveTransform(points1, points2)
# 应用透视变换
image_per = cv2.warpPerspective(image, M, (image.shape[1], image.shape[0]))
# 裁剪出精确的矩形区域
image_per_new = image_per[int(points2[0][1]):int(points2[3][1]),
int(points2[0][0]):int(points2[3][0])]
# 显示原始图片与矫正结果
cv2.imshow("image", image)
cv2.imshow("image_per", image_per)
cv2.imshow("image_per_new", image_per_new)
cv2.waitKey(0)
cv2.destroyAllWindows()

三、
题目1:请编写一段Python代码,使用OpenCV库对一张图像进行以下处理:
- 将图像转换为灰度图。
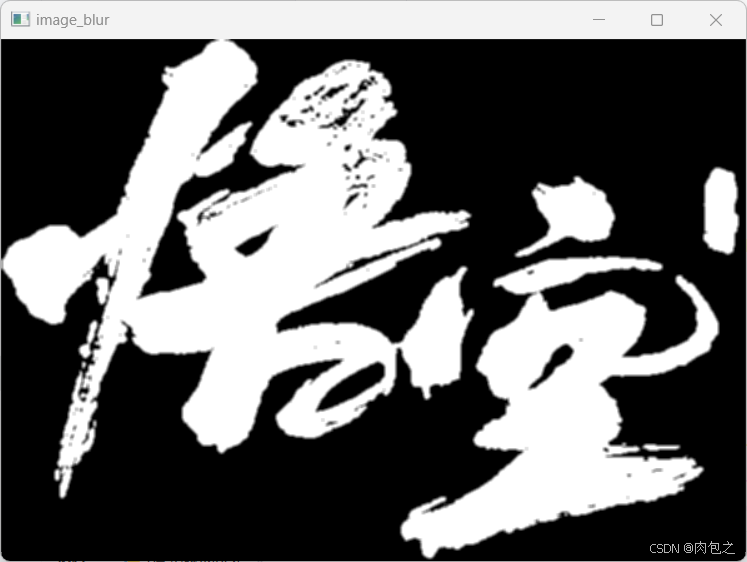
- 使用高斯滤波器平滑图像,内核大小为5x5,标准差为1。
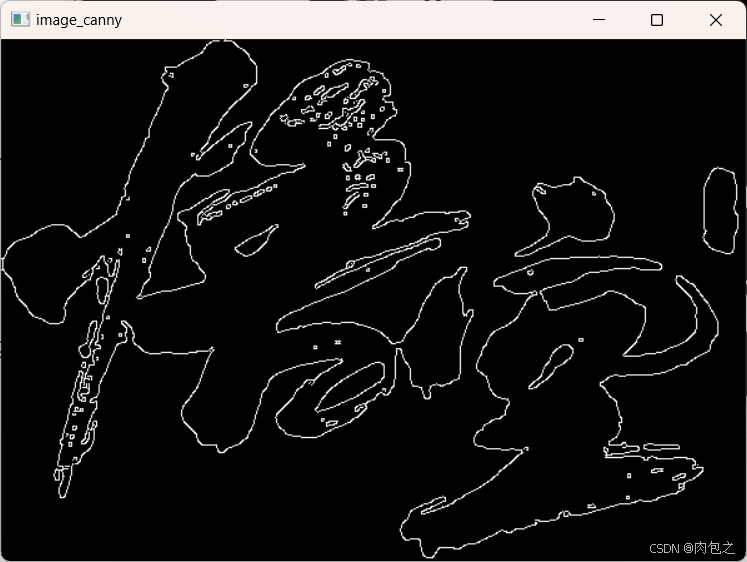
- 使用Canny边缘检测算法检测图像边缘,阈值1为50,阈值2为150。
- 在检测到的边缘图像上绘制轮廓,轮廓颜色为红色,厚度为2。
import cv2
image = cv2.imread("./logo.png")
image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
_, image_binary = cv2.threshold(image_gray,
127,
255,
cv2.THRESH_OTSU + cv2.THRESH_BINARY
)
image_blur = cv2.GaussianBlur(image_binary,
(3,3),
3
)
image_canny = cv2.Canny(image_blur,
30,
70
)
# cv2.imshow("image", image)
# cv2.imshow("image_gray", image_gray)
cv2.imshow("image_binary", image_binary)
cv2.imshow("image_blur", image_blur)
cv2.imshow("image_canny", image_canny)
cv2.waitKey(0)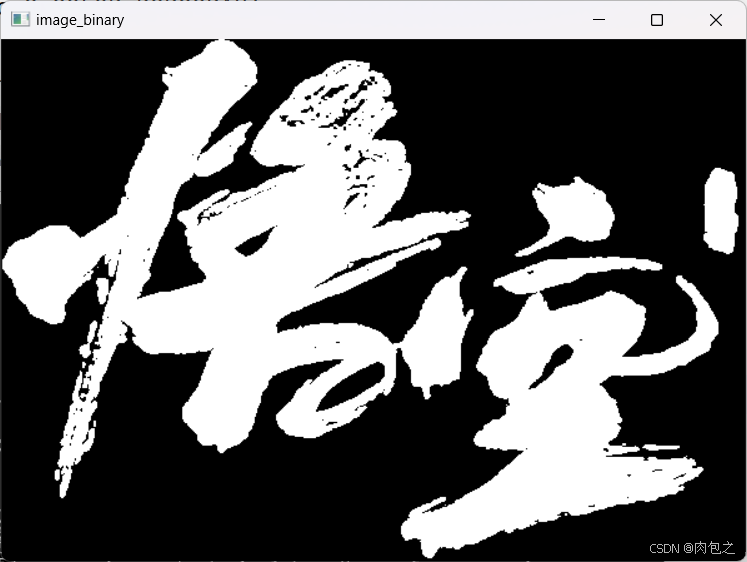
四、
1.交通信号灯识别:
你正在开发一个自动驾驶系统,需要识别交通信号灯的颜色(红、黄、绿)。请设计一个简化的流程,说明如何使用OpenCV来识别交通信号灯的颜色。
思路分析:
- 读取包含交通信号灯的图像。
- 转换图像到HSV颜色空间。
- 分别为红、黄、绿三种颜色定义HSV范围,并创建三个掩膜。
- 对每个掩膜进行轮廓检测,识别出可能的信号灯区域。


2.产品质量检测:
在一家生产彩色玩具的工厂中,需要检测产品是否按照正确的颜色进行生产。请设计一个使用OpenCV的自动化检测系统,该系统能够识别并报告不符合颜色标准的产品。
思路分析:
- 设定产品的标准颜色范围(HSV值)。
- 使用摄像头或图像文件获取待检测产品的图像。
- 转换图像到HSV颜色空间。
- 为每种标准颜色创建掩膜,并与产品图像进行比对。
- 识别出颜色不符合标准的产品,并记录或报告。
import cv2
import numpy as np
# 读取图像并调整大小
image = cv2.imread('./duck.png') # 读取指定路径的图像
image = cv2.resize(image, (600, 600)) # 将图像调整为600x600像素
# 将BGR图像转换为HSV图像
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # OpenCV默认读取图像为BGR格式,转换为HSV格式,便于颜色范围的筛选
# 定义橡皮鸭的标准颜色范围(HSV值)
# 每种颜色都包含了其对应的最小和最大HSV值范围,以及用于绘制矩形的颜色
colors = {
'red': {'min': np.array([0, 100, 100]), 'max': np.array([10, 255, 255]), 'color': (0, 0, 255)},
'blue': {'min': np.array([70, 50, 50]), 'max': np.array([130, 255, 255]), 'color': (255, 0, 0)},
'green': {'min': np.array([50, 100, 100]), 'max': np.array([70, 255, 255]), 'color': (0, 255, 0)},
'pink': {'min': np.array([140, 50, 50]), 'max': np.array([180, 255, 255]), 'color': (255, 0, 255)},
'black': {'min': np.array([0, 0, 0]), 'max': np.array([180, 255, 46]), 'color': (0, 0, 0)},
}
# 遍历每种颜色,检测图像中的相应区域
for color_name, color_range in colors.items():
# 使用inRange函数根据HSV值范围生成掩膜,提取出符合范围的颜色区域
mask = cv2.inRange(hsv, color_range['min'], color_range['max'])
# 使用findContours检测掩膜中的轮廓
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 遍历检测到的轮廓
# 遍历所有轮廓,筛选出面积符合要求的轮廓并绘制
for cnt in contours:
if cv2.contourArea(cnt) < 600 or cv2.contourArea(cnt) > 20000000:
continue
M = cv2.moments(cnt)
cX = int(M['m10'] / M['m00'])
cY = int(M['m01'] / M['m00'])
cv2.drawContours(image, [cnt], 0, (0, 0, 255), 2)
cv2.putText(image, 'no', (cX, cY), cv2.FONT_HERSHEY_SIMPLEX, 0.5, color_range['color'], 2)
# 显示处理后的图像,包含标记出的颜色区域
cv2.imshow('image', image)
cv2.waitKey(0) # 等待按键输入后关闭图像窗口
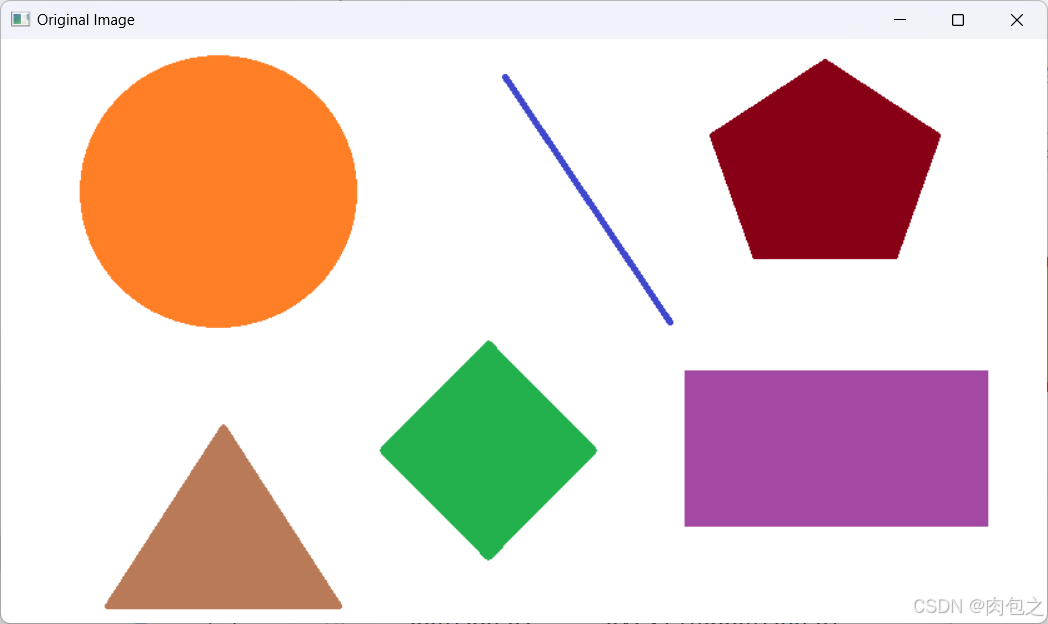
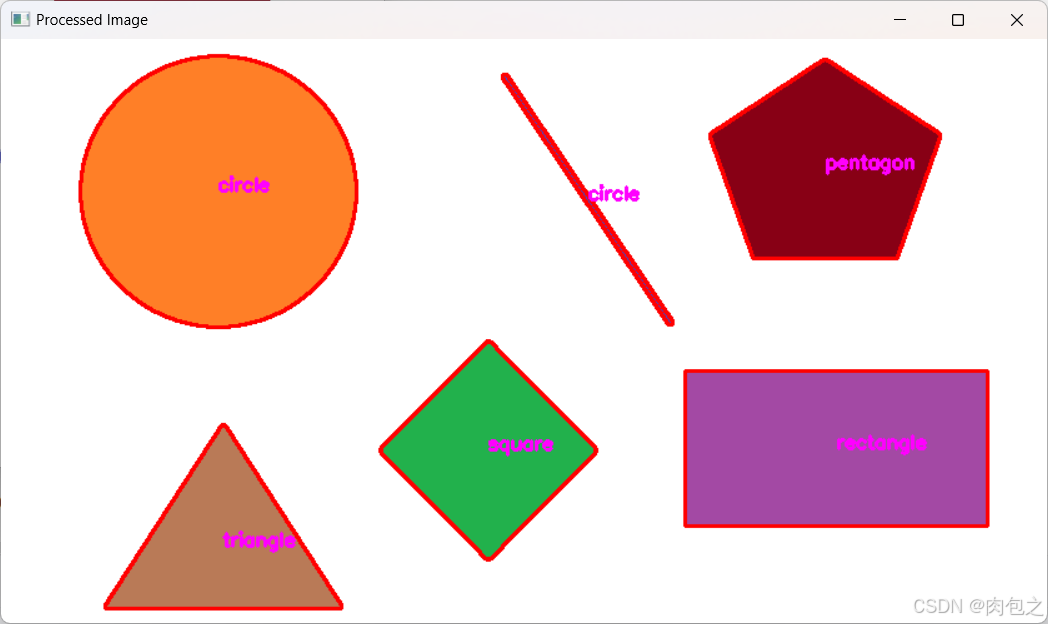
3.图像预处理与特征提取
-
将图像转换为灰度图
-
对灰度图进行二值化处理
-
使用形态学变换去除噪声【开运算】
-
检测图像中的边缘
-
查找并绘制图像中的轮廓
-
逐一遍历轮廓,输出所有四边形的周长 和 面积。
import cv2
# 1. 读取输入图像
image = cv2.imread("./02.png") # 从指定路径加载图像文件
# 2. 对图像进行高斯模糊,平滑图像以减少噪声
image_blur = cv2.GaussianBlur(image, (3, 3), 1)
# 3. 将模糊后的图像转换为灰度图像
image_gray = cv2.cvtColor(image_blur, cv2.COLOR_BGR2GRAY)
# 4. 应用自适应阈值分割,生成二值图像
_, image_binary = cv2.threshold(
image_gray, 127, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU
)
# 5. 在二值图像中寻找轮廓
contours, _ = cv2.findContours(
image_binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE
)
# 6. 创建图像副本用于绘制轮廓
image_copy = image.copy()
# 7. 遍历所有轮廓并分析轮廓的属性
for cnt in contours:
# 7.1 计算轮廓的矩(质心、面积等信息)
M = cv2.moments(cnt)
if int(M["m00"]) == 0:
continue # 如果轮廓面积为 0,则跳过该轮廓
# 7.2 计算轮廓的周长
arc_len = cv2.arcLength(cnt, True)
# 7.3 使用多边形逼近轮廓
approx = cv2.approxPolyDP(cnt, float(0.04) * arc_len, True)
# 7.4 判断逼近多边形的顶点数并分类形状
if len(approx) == 3:
shape = "triangle" # 如果逼近的多边形有 3 个顶点,分类为三角形
elif len(approx) == 4:
x, y, w, h = cv2.boundingRect(approx)
# 判断长宽比以区分正方形和矩形
ratio = w / h
if 0.95 <= ratio <= 1.05:
shape = "square"
else:
shape = "rectangle"
elif len(approx) == 5:
shape = "pentagon" # 五边形
else:
shape = "circle" # 默认分类为圆形
# 7.5 绘制轮廓和形状标签
cv2.drawContours(image_copy, [cnt], -1, (0, 0, 255), 2) # 红色轮廓线
cX = int(M["m10"] / M["m00"]) # 计算质心 X 坐标
cY = int(M["m01"] / M["m00"]) # 计算质心 Y 坐标
cv2.putText(
image_copy, shape, (cX, cY), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 255), 2
)
# 在质心处绘制形状名称,颜色为紫色,字体大小为 0.5,线条粗细为 2
# 8. 显示原始图像和处理后的图像
cv2.imshow("Original Image", image)
cv2.imshow("Processed Image", image_copy)
cv2.waitKey(0) # 等待按键关闭窗口
cv2.destroyAllWindows()
4.车牌识别预处理
假设你正在开发一个车牌识别系统,首先需要从图像中识别出车牌区域。请描述并编写代码实现以下步骤:
-
读取一张包含车牌的图像。
-
将图像转换为灰度图以简化处理。
-
使用高斯滤波器平滑图像,减少噪声干扰。
-
应用Canny边缘检测算法检测图像中的边缘。
-
查找图像中的轮廓。
-
逐一遍历轮廓。
-
设定一个面积双阈值,只保留面积在该阈值的轮廓。
-
计算这些轮廓的长宽比,长宽比ratio在2到5.5之间的,在原图上用矩形框标出,这些轮廓可能是车牌的候选区域。
import cv2
# 读取图片文件
img = cv2.imread('./c.png')
# 复制原图
img_copy = img.copy()
# 将图片转换为灰度图
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用高斯滤波器进行平滑处理
img_gray = cv2.GaussianBlur(img_gray, (5, 5), 0)
# 应用Canny边缘检测算法检测图像中的边缘。
img_canny = cv2.Canny(img_gray, 50, 150)
# 找到轮廓
contours, hierarchy = cv2.findContours(img_canny, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# 遍历所有轮廓
for i in contours:
# 筛选轮廓面积在10000到15000之间的轮廓
if 300 < cv2.contourArea(i) < 1500000:
x, y, w, h = cv2.boundingRect(i)
ratio = float(w) / h
# 筛选长宽比在2到5.5之间的矩形
if 2 < ratio < 5.5:
# 画矩形
cv2.rectangle(img_copy, cv2.boundingRect(i), (0, 255, 255), 5)
# 显示原图
cv2.imshow('img', img)
# 显示绘制了轮廓的图片
cv2.imshow('img_draw', img_copy)
# 等待按键按下
cv2.waitKey(0)


















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









